Ok guys i have a couple of problem and i can’t find a clear post or guide to help me get through it.
First… When i connect the drone to ardupilot software now i have only one alarm the prearm geofence required position. This is the only alarm i see in the log and i can’t arm the drone because the software tells me to fix all the errors first.
I have disabled all the controls and now I can arm the drone.
Now you will say: “In the configuration menu you can calibrate escs and test the motors.”
Yeah! True! but i have only one problem … The motors test does not work because the controls are blocked by the autopilot. I have not activated any autopilot … How can I deactivate it?
Then I have a brilliant idea … Let’s try using QGC!
The motors test here does not work because it tells me that RC is not calibrated but this is not true. I did the calibration without problems or errors and it works all including the switches and flight modes.
when I try to do the motors test I saw that in the log it gives me two errors of RC15 and RC16 out of scale but I don’t have those two channels either.
In any case even with the armed drone if I move the throttle the motorss do nothing.
I thank you all for the help you will give me and for the patience you will have with me.
I’m back here again. After a couple of tests i found an erron into the value of RC16 and RC15 parameters… It’s strange because i have never changed this value but in any case i finally cleared the prearm error of rc calibration and i could calibrate ESCs. Once the ESCsS was calibrated, the motors finally started. Unfortunately, I have seen that one of the ESCs is damaged.
Is there any chance you’re located near an airport or any other place where drone flying is prohibited? It can be one of the reasons for such an error.
thank you @tatiana.andreeva for your answer. In fact near my house there Is a High Voltate EE Station. In anycase, going to disable all the pre flight checks, I managed to start the engines. With a new ESC i was able ti take off.
Once in the air, however, I realized that there is still much to fix. For the moment I am standing on the ground because I would still like to install a ESC identical to the other three.
in fact, the ESC mounted to replace the failed one, for a try, was of a different type.
I made my first flight successfully or rather I flew the drone without crashing it!
Now I have a few questions to ask:
It seems to me that the stopping time of the propellers when the throttle is at zero is long expecially if this is a failsafe condition. Do you know if there is a way to regulate it?
I only flew in Loiter mode because I don’t feel ready to disable GPS yet. However, I noticed that I have little control over the pitch and rolling. Do you know which parameters are to be modified to make the command more sensitive even with flight modes with GPS? I then noticed that, every now and then, the drone loses altitude quickly even if I am not touching the Throttle. Do you know what caused this sudden drop in height?
While the drone was on the ground I disabled the simple mode because, in reality, it confuses me. When I armed the drone the roll and pitch no longer worked and I had to disconnect the battery and reconnect it to the drone to restart everything regularly. Had it already been reported to you?
I put here a video of the first flight. At 1min 2sec you can see what I mean in point 2 when I say that the drone suddenly loses altitude.
Loiter mode is meant to loiter in one spot and make small corrections, not to fly around.
If you want to fly around with GPS assistance, use the poshold mode.
The drop in altitude can have different reasons. A dataflash log from the flight would make it easier to find the cause.
Without it I can think of the following reasons
Barometer not covered with open cell foam. Light and moving air can cause the barometer to give false values, so you should cover it with a piece of foam. Open cell is the kind you can breath through.
Excessive vibration causes the Z Axis accelerometer to give false values. This can be checked in a dataflash log.
Vortex ring state. Descending vertically can cause a loss of stability/thrust for a rotorcraft, because it is descending through its own propwash. This has caused full size helis to crash. Always try to descend at an angle and not too fast.
I never used simple mode, so I can not help you with the last problem, but a dataflash log might help here, too.
I agree with @schuermannsebastian, the dataflash log would help us to provide more specific recommendations on the 2nd and 3rd questions.
After you move the throttle down, the copter is still armed. Not sure if it’s possible to regulate the stopping time, but you can change the motor speed when the drone is armed but not flying.
I’m back again… and now my drone is broken… In PosHold the drone came off the ground but after a few seconds it shot forward and he hit the ground on one arm and the arm broke.
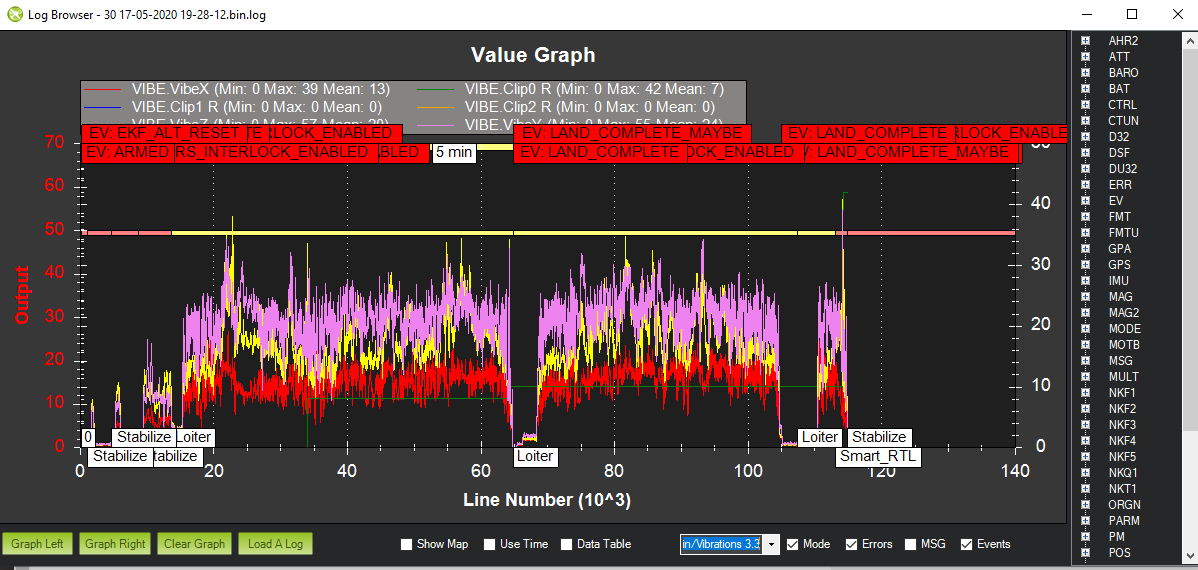
This is the dataflash log analyze of the first fly
Blockquote
Log File C:\Users\pigre\AppData\Local\Temp\tmp416A.tmp.log
Size (kb) 9741.6318359375
No of lines 115015
Duration 0:11:13
Vehicletype ArduCopter
Firmware Version V3.6.11
Firmware Hash 296c62b3
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = FAIL - Large change in mag_field (124.14%)
Max mag field length (703.86) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERRs found: FS_BATT CRASH
Test: GPS = FAIL - Min satellites: 0, Max HDop: 99.99
Test: IMU Mismatch = NA -
Test: Motor Balance = GOOD - Motor channel averages = [1602, 1642, 1607, 1597]
Average motor output = 1612
Difference between min and max motor averages = 45
Test: NaNs = FAIL - Found NaN in CTUN.TAlt
Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = GOOD -
Test: Pitch/Roll = UNKNOWN - Unknown mode in TestPitchRollCoupling: SMART_RTL
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
This is the flight of this day
Blockquote
Log File C:\Users\pigre\AppData\Local\Temp\tmp6F12.tmp.log
Size (kb) 113.3955078125
No of lines 1926
Duration 0:00:02
Vehicletype ArduCopter
Firmware Version V3.6.11
Firmware Hash 296c62b3
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (9.05%)
Test: Dupe Log Data = GOOD -
Test: Empty = FAIL - Empty log? Throttle never above 20%
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = NA -
Test: Motor Balance = GOOD - Motor channel averages = [1034, 1034, 1034, 1034]
Average motor output = 1034
Difference between min and max motor averages = 0
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = UNKNOWN - No PM log data
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
This is the image of the frame that contains the raspberry and the navio2 card. The two cards are supported by two gray rubber strips and you can also see the foam that I have fixed on the barometer.
That’s all for now. I will put the photo of the new assembled drone as soon as the components arrive.
I’m here… I had some difficulty in finding the components due to the health emergency that is hitting hard in Italy.
I decidet to change completely the frame off the drone. In first time I used a 330mm frame but now I have passed to a 650mm frame where I can easily install the components in order to guarantee them adequate protection.
Unfortunately I confused the motor connections and now I have to redo them in order to have the right alternation between clockwise and counterclockwise rotation.
I also think I will remove the PiCamera and mount an action camera.
I take this opportunity to ask a question … Is there a way to replicate the Navio 2 status LED? I have connected an RGB Led strip to the drone and would like to understand if I can use it to have greater visibility of the state of the Drone in flight.
Hi,
in regards to pi-camera: It’s well known that pi camera and its cable cause issues with interference. - Hence you can check online for info on how to best shield camera and cable. (i.e. copper tape, or at least aluminium foil wrapped around cable and rear of camera with insulation in between.)
But if you are using other camera than that may solve this issue anyway.
Vibration as noted by Tatiana: Besides the anti-vibration mounts for the controller, you should also ensure the propellers are balanced. If that is not the case all the mounts for the controller may not solve problems.
Stopping time of the propellers: This needs to be done via programming the ESC’s according to instructions of your ESC’s - Sometimes a download is required as not all ESC’s come with printed instructions. Most ESC’s have a function called “motor -break”. This will instantly stop the propeller spinning once motors are turned of.
Electro Magnetic interference: You’ve mentioned in an earlier post that you live next to a High Voltate EE Station. Please don’t fly anywhere near that as the magnetic field from the station will alomost certainly cause all sort of problems in regards to build in compass and /or also cause problems with GPS reception.
TY @anon31534460 for your complete answer. I have already shield the RaspiCam cable with aluminium paper but I want switch to an action camera for a more beatiful video and images.
For the vibration I have chosen to change drone frame and I will also change the propellers with better quality propellers.
Finally, the point concerning the programming of the ESCs is very interesting.
How can we work on the programming of the ESCs? Via Ardupilot? with other flight control it is possible to connect via USB and try with BL Heli but I don’t know if it is feasible with Navio2.