



I am using this.
I tried it because there is a spare, but the same result was obtained.
Could you please record a log with this behavior and post it here?
Please follow this guide to download it.
2018-12-13 17-34ーlog.bin.zip (7.4 KB)
Is this okay?
This is a log when the throttle is fixed like the movie and rotated for about 20 seconds
This log is empty. Please double check you’ve shared the correct log file.
I’m sorry.
Is it this?
53 2018-12-13 17-34-11.bin (260 KB)
53 2018-12-13 17-34-11.bin.log (491.5 KB)
Hello,
Some remarks: your “Flight Modes” are not configured, you have only stabilize flight mode (default).
During your test, Quad is not level (1° tilt and roll error) or the Level Calibration is not accurate.

Redo Level Calibration and be sure Quad is level when doing your test in Stabilize mode,
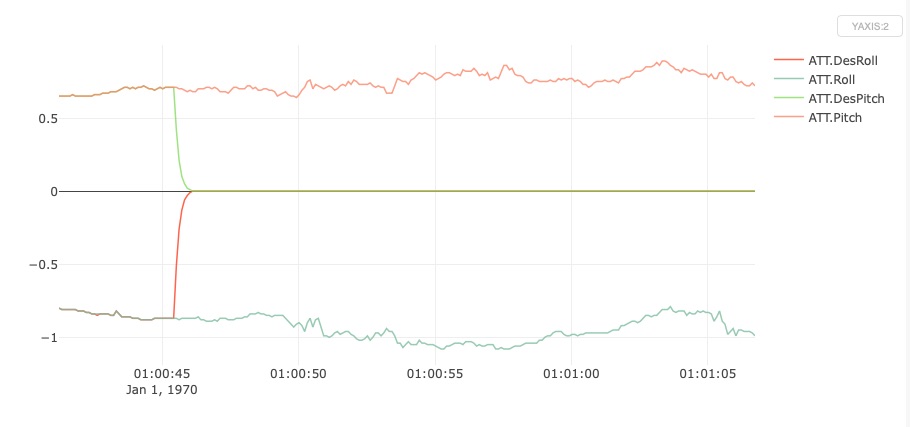
The autopilot want to correct the tilt and roll error without result (increasing power on the lowest part of the quad and no propellers to do the work).
Marc
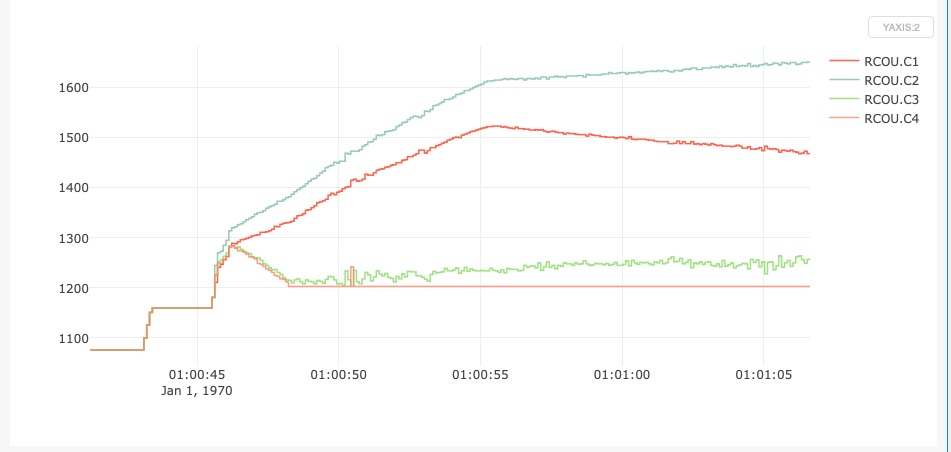
After doing level calibration, I let it output in the same way.
The output automatically increases.
71 1970-01-01 9-00-00.bin (421.0 KB)
71 1970-01-01 9-00-00.bin.log (823.1 KB)
I confirmed that the aircraft was level.
Even with perfect level calibration there will still be sensor noise and drift. The PID “I” term will add these errors up and the motors will run faster. It is a general rule to never let a multicopter sit on the ground with the throttle raised and not taking off if you plan to actually fly. The I term windup may cause the copter to flip over when you finally raise the throttle to take off.
So the behaviour you are observing is perfectly normal for a copter that is not flying. You are not controlling the motor throttle directly, you are only giving commands to the FC and it calculates the PWM outputs to the ESCs/motors
understood.
thank you everyone!!
1 Like