I built it using “Building ArduPilot using Waf build system”.
I connected to missionplanner.
sudo ./ardupilot/build/navio2/bin/arducopter -A udp:192.168.2.108:14550
Raspberry Pi 3 Model B Rev 1.2. (intern: 2)
MS5611 found on bus 1 address 0x77
MPU: temp reset IMU[0] 5881 3632
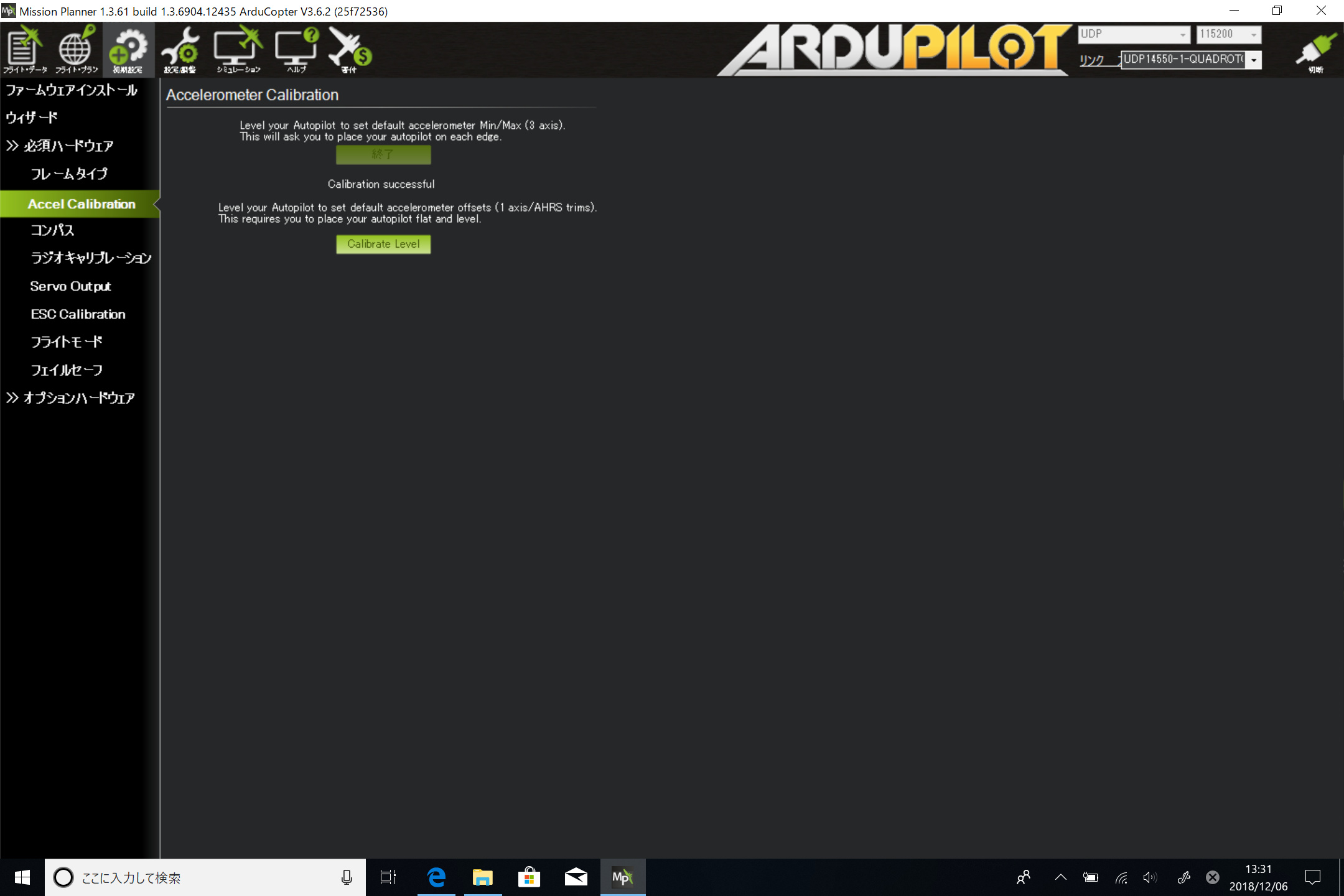
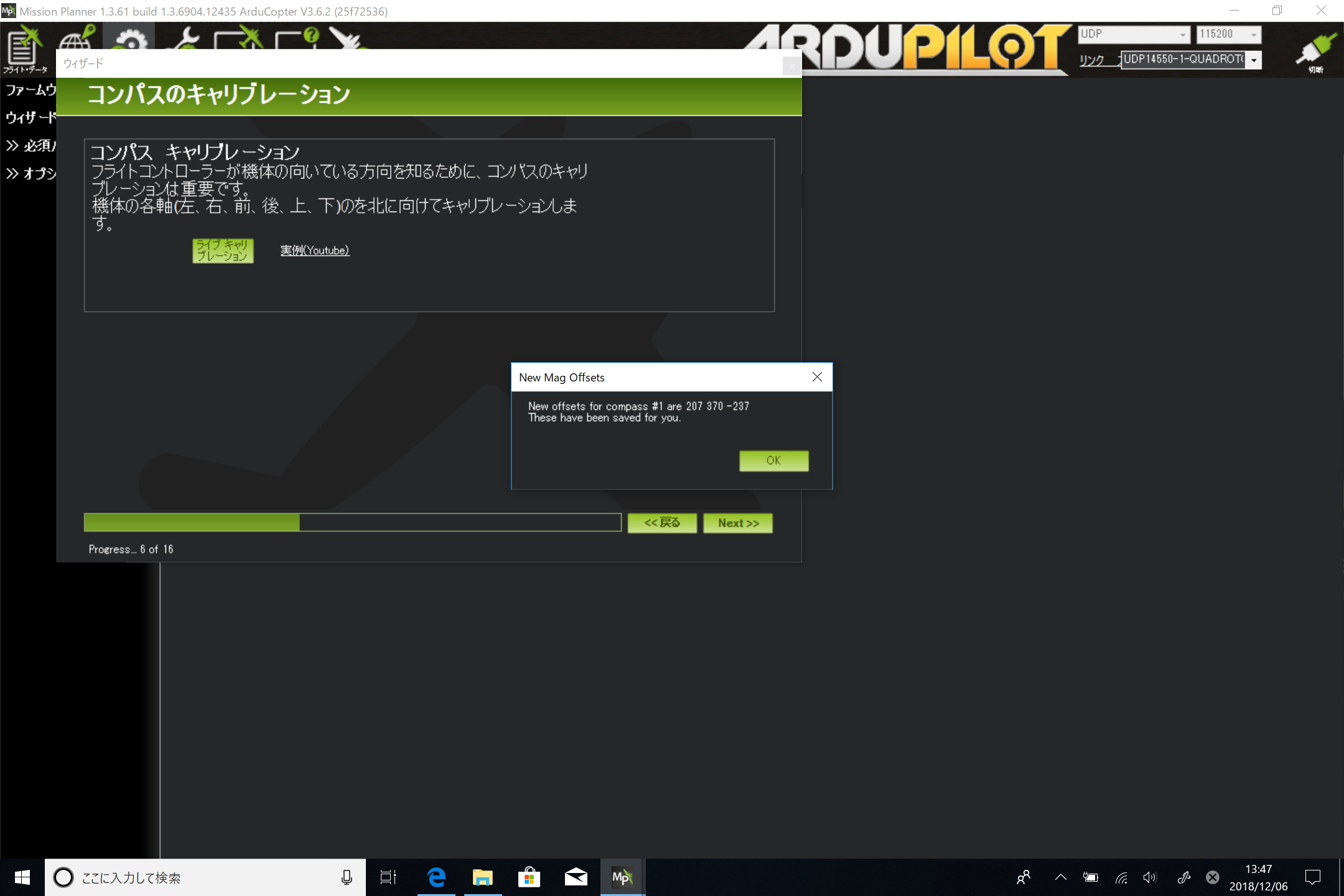
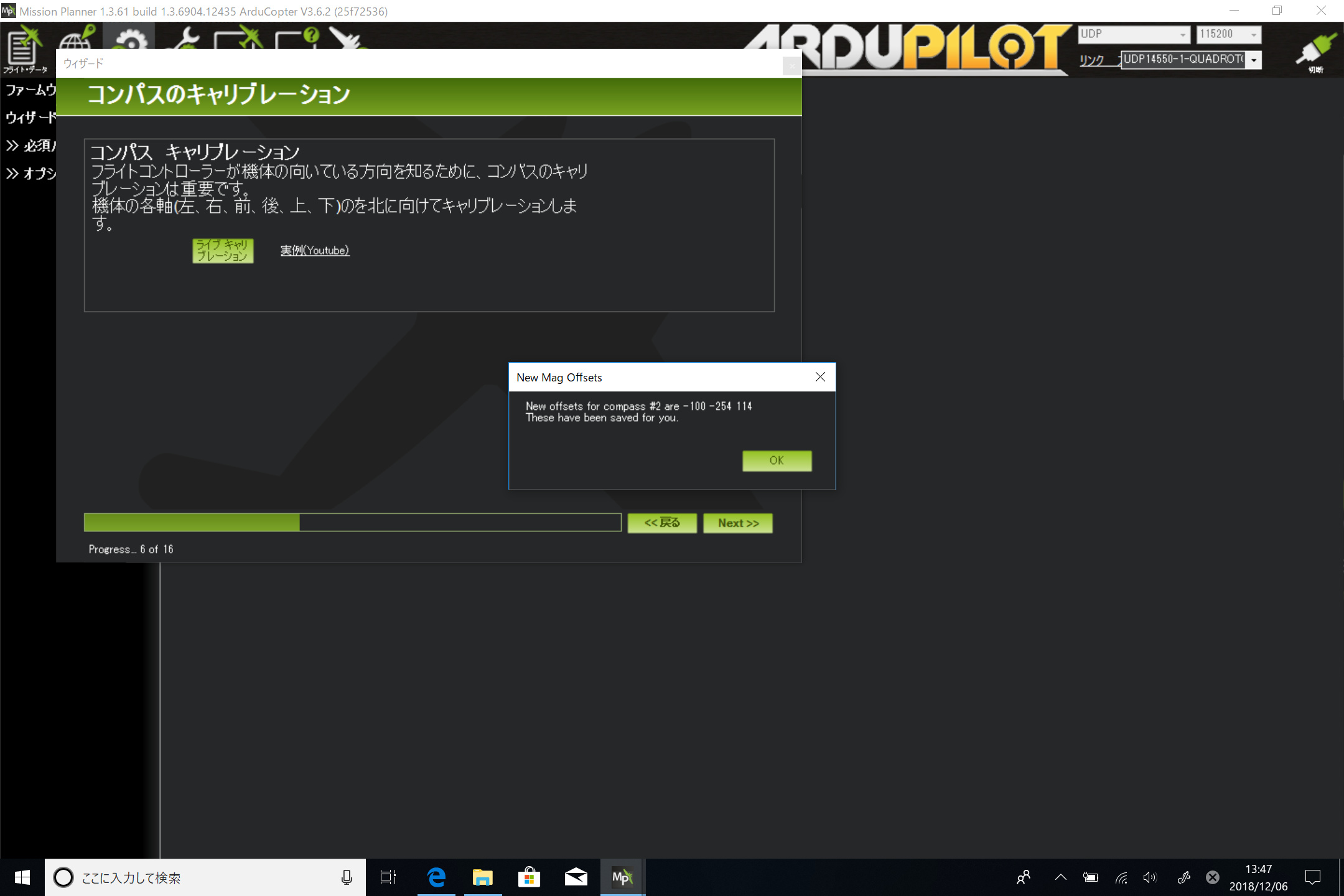
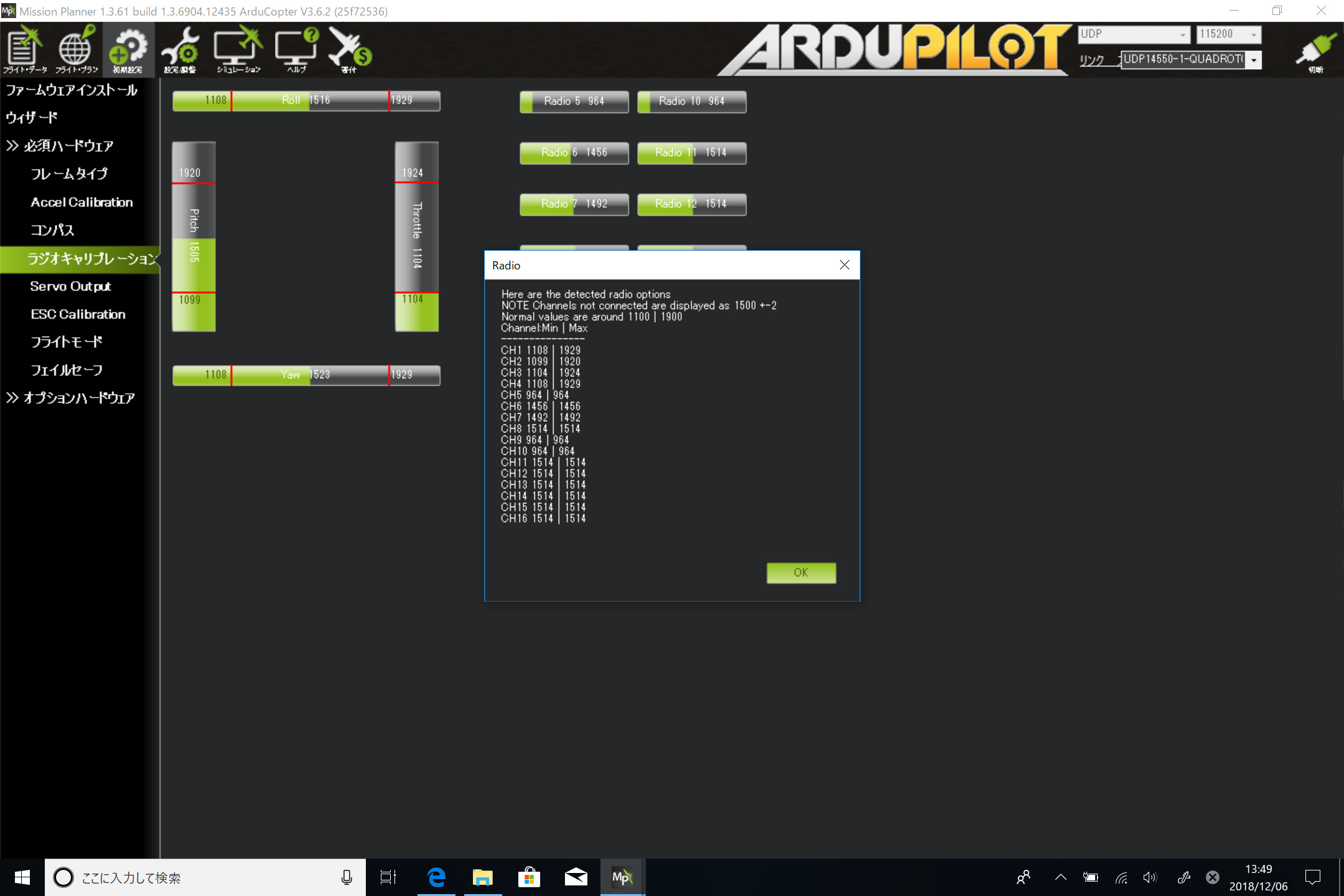
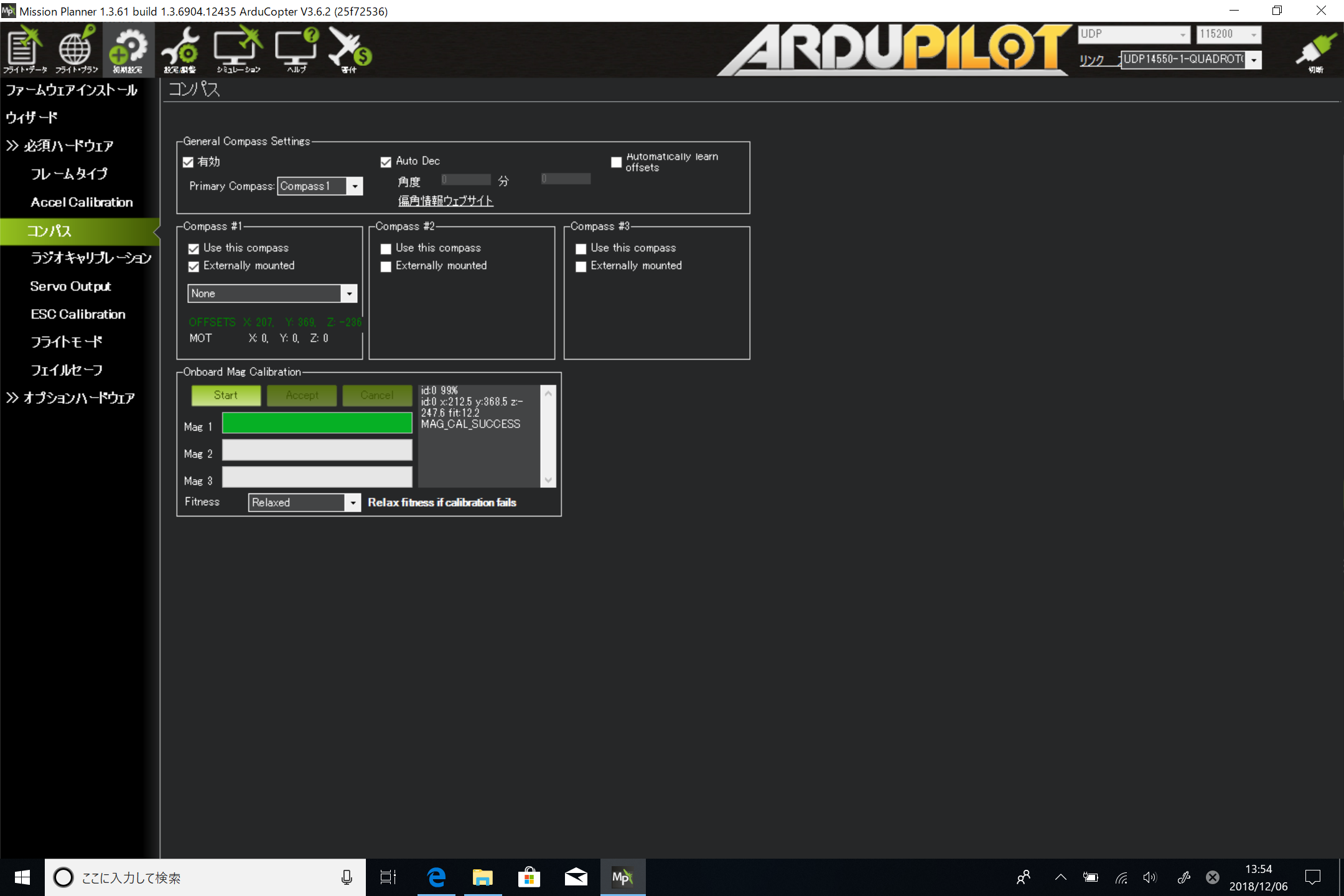
I finished the calibration, but the LED of Navio 2 is blinking yellow and it can not be armed.
I do not know the cause, please help me.
Please describe your issue more precisely.
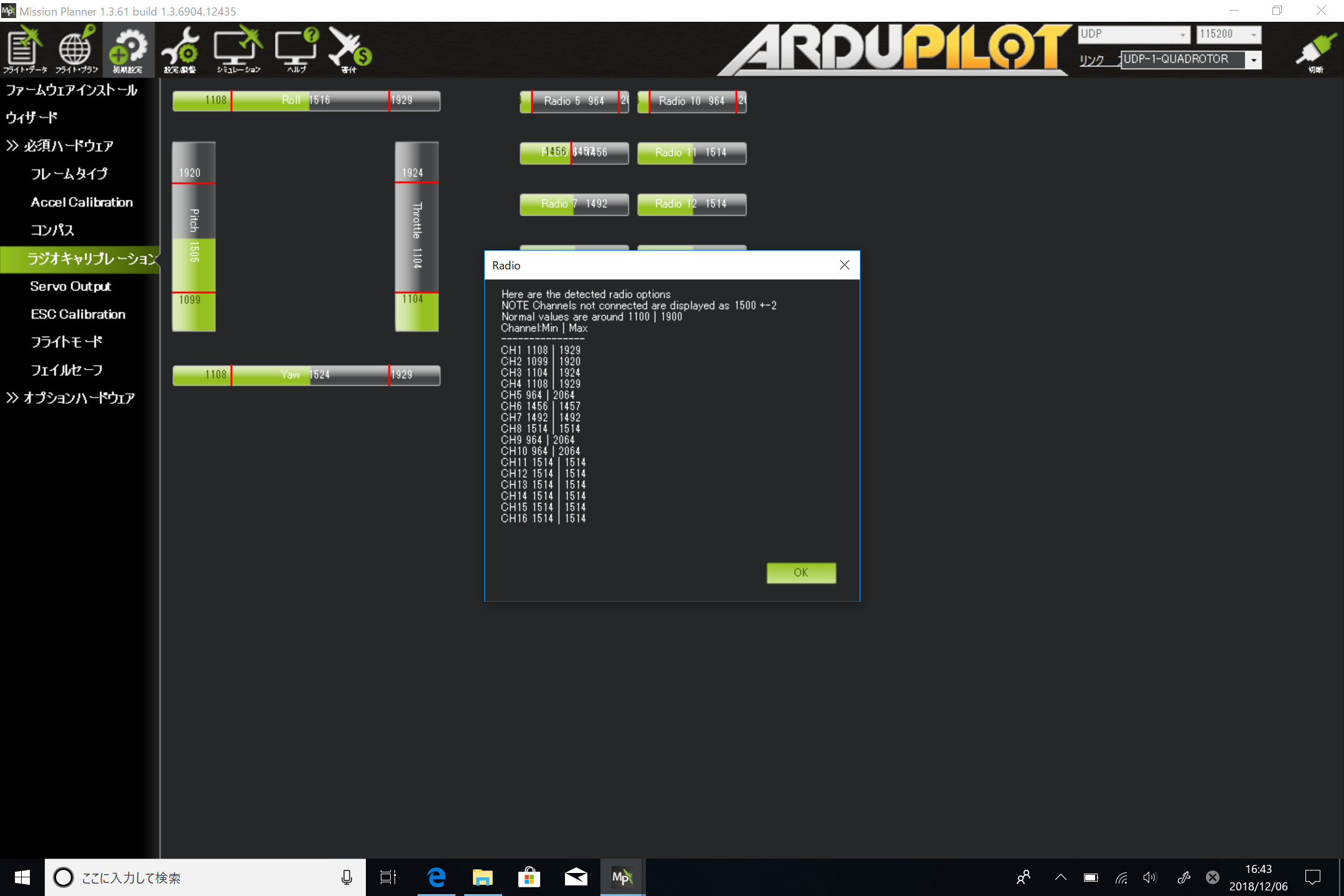
May I ask you to list all calibrations you’ve gone through? It’d be great if you’ll share the screenshots as well.
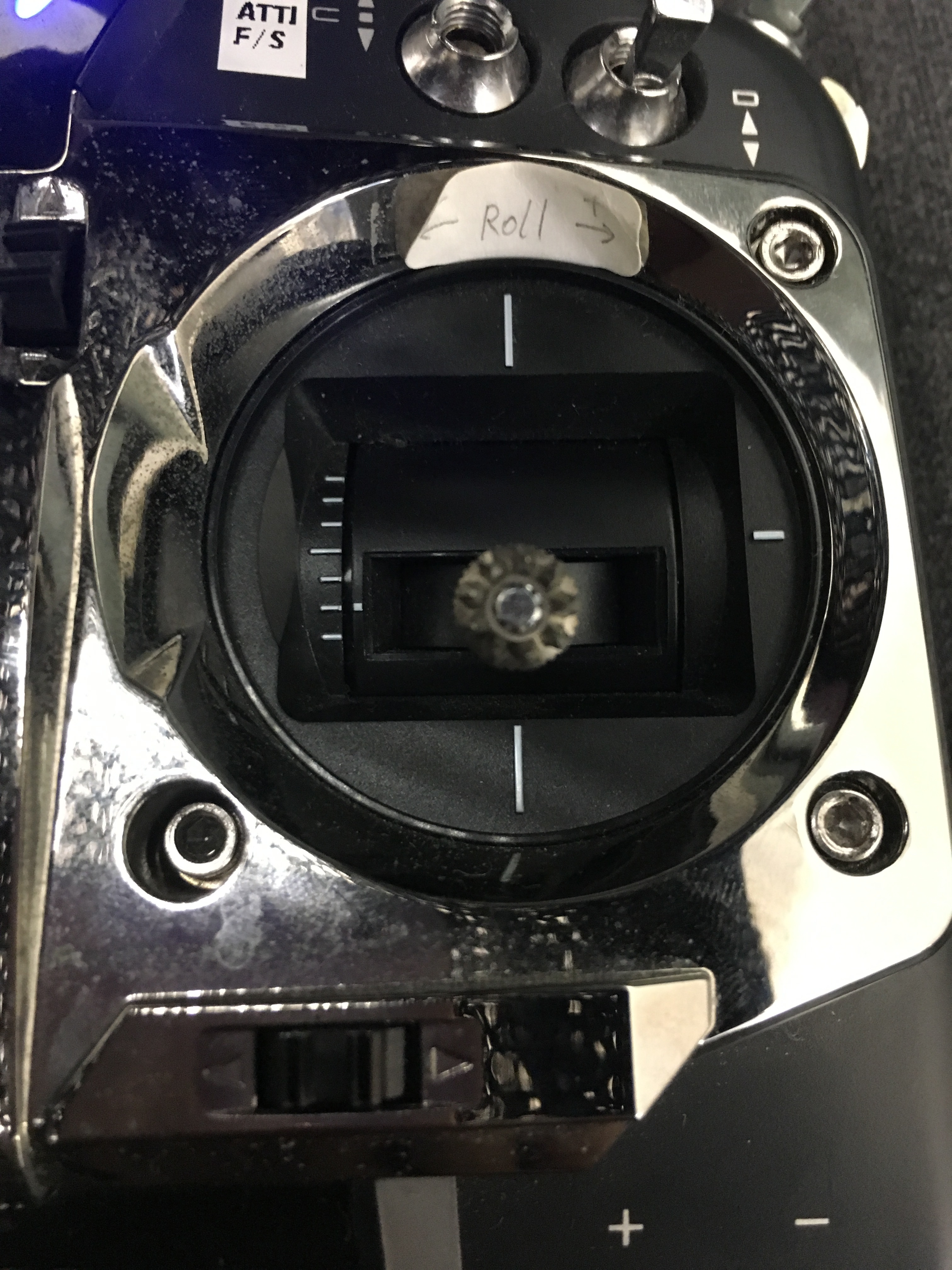
I fixed the throttle to 20% and rotated the motor like a picture of a quad rotor.
However, the throttle is not changed, but the output of the motor rises independently.