I use your Raspbian image and i install ArduPilot via your command :
sudo apt-get install apm-navio2
I install on my PC Windows : Mission Planner 1.3.38
On PI i use the command :
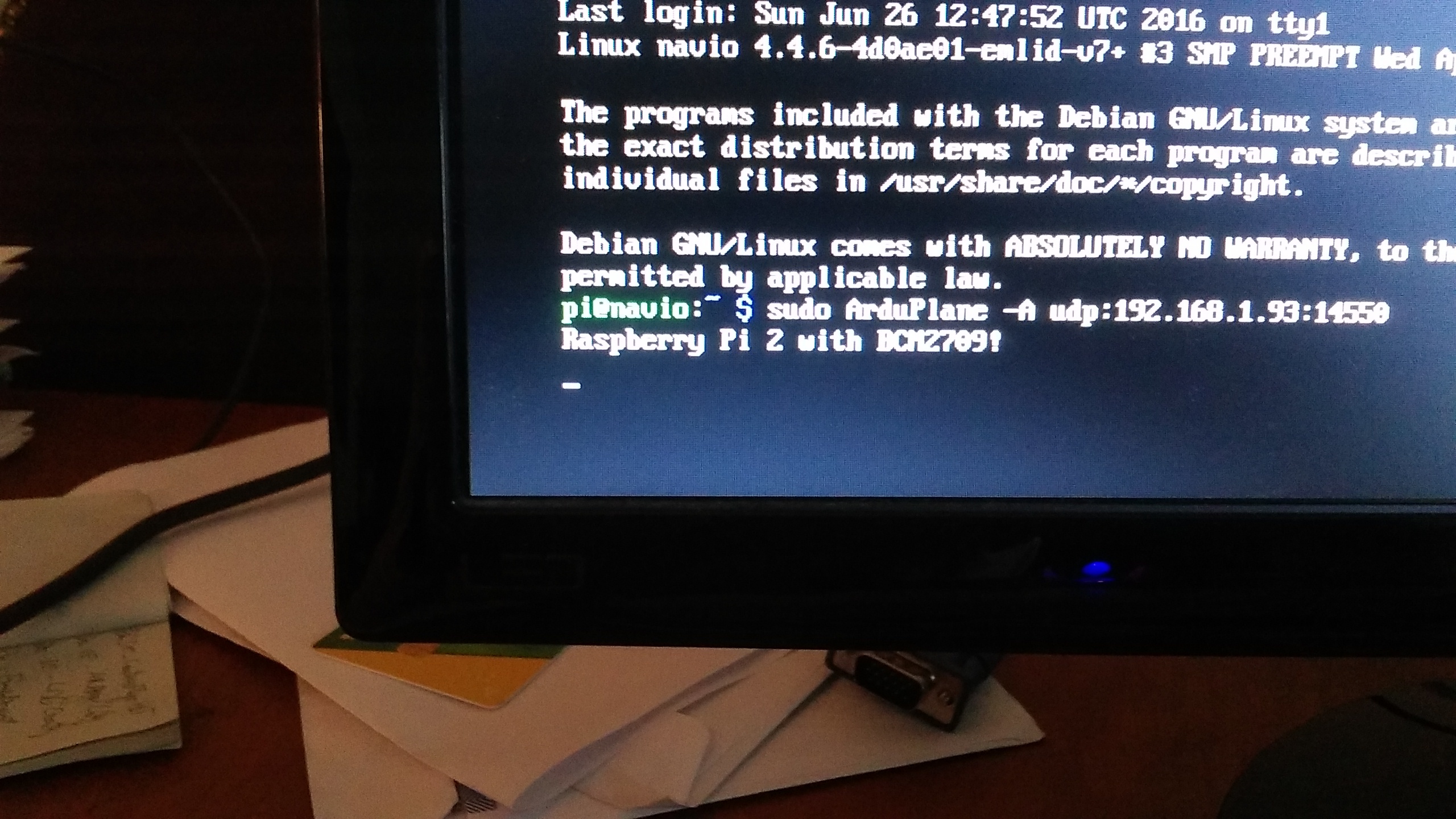
sudo ArduPlane -A udp:192.168.1.93:14550
I have this response from Pi : Raspberry Pi 2 with BCM2709!
is it normal ?
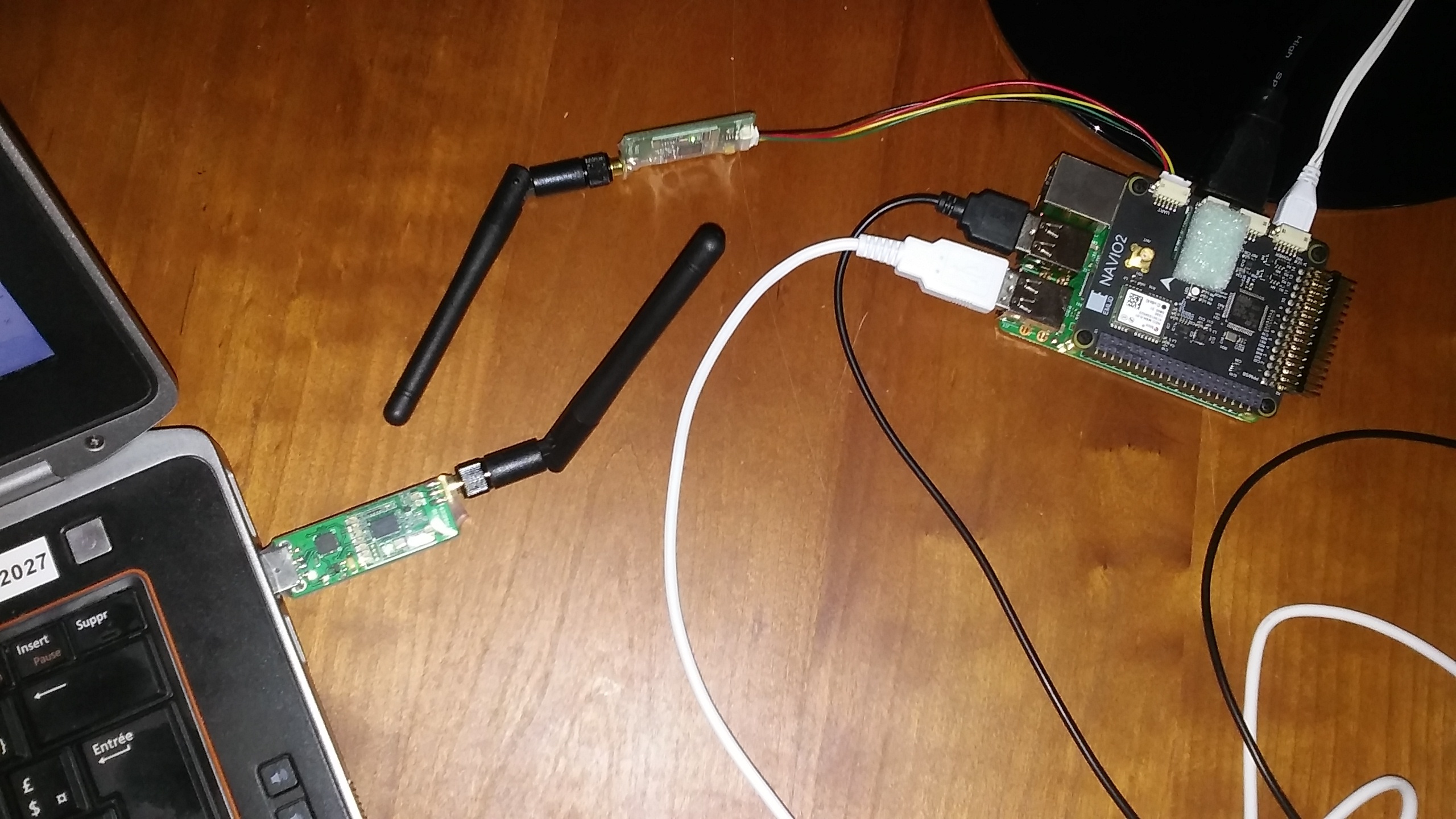
For telemetry i use : 915mhz
On Mission planner i have : COM5 Silicon Labs CP210x USB to UAV
when i try to connect => timeout
Perhaps i need a driver on PI ?
My questions :
is it normal to have nothing display on PI screen (nop the strange Raspberry Pi 2 with BCM2709!)
Why i have a timeout with modem 915 mhz?
When try to connect via TCP, i don’t know the port
Regarding the telemetry connection, you have a few things confused.
EDIT: I just had a closer look at your picture. Since you have no network connection to your RPi, you should use this as your startup command:
sudo ArduPlane -C /dev/ttyAMA0
Your problem is, you are starting APM with UDP network telemetry and then you try to connect through your 915MHz serial telemetry kit. If 192.168.1.93 is the IP of your GCS PC, then you should simply select UDP in Missionplanner and enter 14550 as the listening port (should be default).
Lengthy explanation below.
There are two possible telemetry connection types in general:
Serial: This can be a direct cable connection or any kind of serial RF link. Your 915MHz telemetry kit is a serial link.
Network: This can be anything, that uses tcp or udp packets. Ethernet cable, wifi, 3G, 4G etc.
You can specify two telemetry options with APM startup:
The -A option is usually used for network connections, because it is set to 115200baud in APM by default. Baudrates and all other settings are set through the serial_0 options in APM.
You can use it with UDP, like you did in your startup command. UDP has less overhead and lag, but you need to know the IP of the GCS computer. If you change networks or want to use different GCS computers, an automated startup with UDP can be cumbersome.
TCP is client/server based and you can start APM with -A tcp:0.0.0.0:6000 and it will listen on any device, any IP, port 6000 for an incoming connection.
The -C option is used for serial telemetry connections, because it is set to 57600baud by default and 3dr radios for example are set to 57600baud, too. Baudrate etc. is set through serial_1 in APM.
When i use the command :
sudo ArduPlane -A udp:192.168.1.93:14550 -C /dev/ttyAMA0
it works, i can connect my ground station with wifi or change to me serial modem.
the connection is ok on both cases.
But when i use the simple command : sudo ArduPlane -C /dev/ttyAMA0
on my PI3 i get the message : /sys/kernel/rcio/adc/ch65 not opened :No such file or directory
and i have a lot of strange characters on my screen.
I wonder if this will work when i am far from my wifi (in the country side)
If you leave out the -A option, APM will send telemetry to the console (stdout).
But you can just leave the -A option in. APM will start, even if there is no network present.
Thanks guys, same situation myself. sorted now. first day first drone. not regretting it yet.
By what you say schuermann there seems to be no connection via usb comm port like i’ve seen other use on non navio setups. Is that the case?
Since the Raspberry Pi is an USB-Host itself, you can not simply connect it to your PC with an USB cable. It is exactly like you can not connect PC to PC with an USB cable.
Emlid could perhaps integrate a FTDI chip on the Navio, but it would be of limited use, since there is no need to flash a firmware to the RPi Navio combo as it is the case with MCU based flightcontrollers. If you want a cable telemetry connection, you can always plug a USB to serial adapter into the RPi or use a ethernet cable.
You mean, if you could use your smartphone together with the RPi/Navio combo?
I do this all the time.
OTG is USB-host mode for devices that do not have a full usb-host controller, because they are usually acting as clients. That does not apply to the RPi, because it already has full USB-host capabilities.