Hardware:
Navio 2 + RPi 2 B
telemetry: FT232R 433mhz
I met a problem of connecting Navio2 in Mission Planner.
I could connect Navio2 at sometimes (most after restart ArduCopter on Navio2), but I was always disconnected from it after connecting for a while.
And if I restart ArduCopter in Navio2, sometimes it will be connectable for a while again, sometimes not.
I tried to use UDP and 3DR radio telemetry, and got the same result.
It makes me can’t calibrate anything in mission planner.
Could you help me to debug? thanks!
Thanks for your reply!
the line “/etc/default/arducopter” is a mistake when I took the snapshot.
In the file, it doesn’t exist.
I will change the UDP port to 14550 and reply the result, thanks!
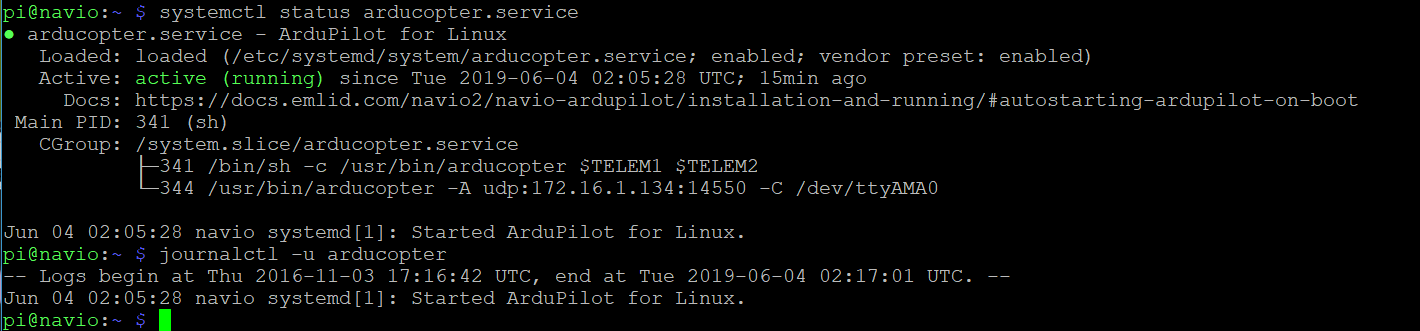
Can I ask you to send here the output of these commands after connection drops?
journalctl -u arducopter systemctl status arducopter.service
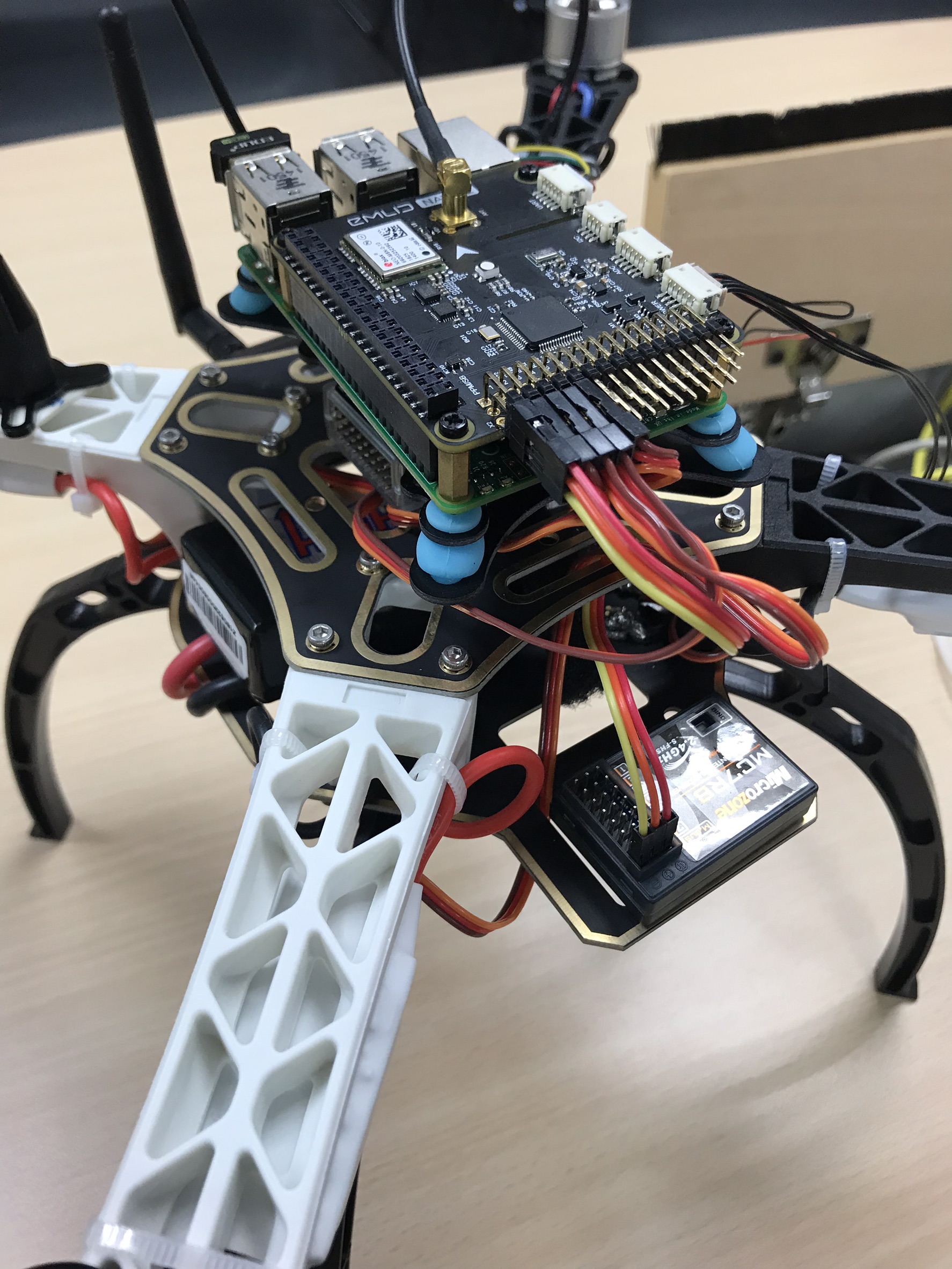
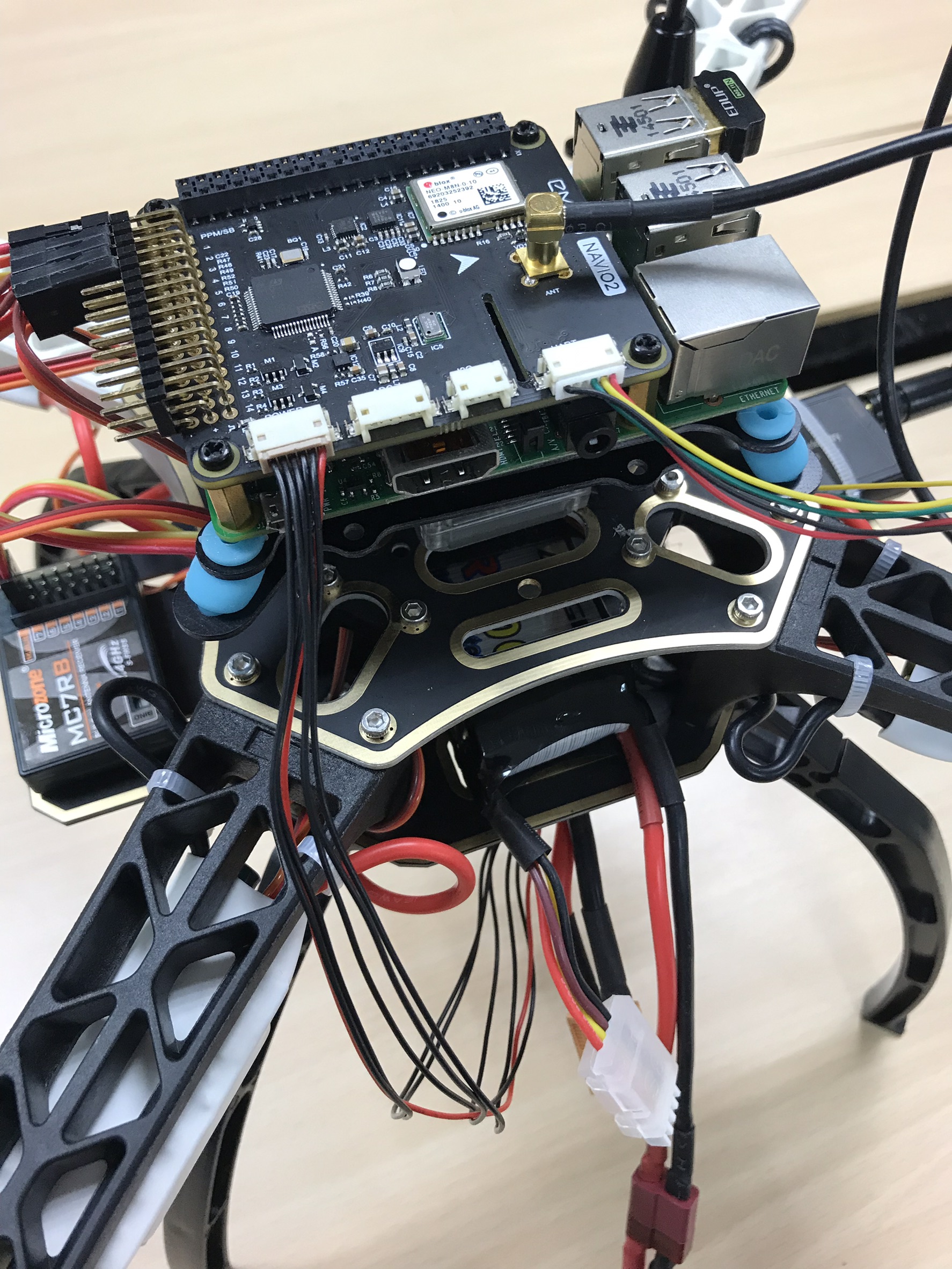
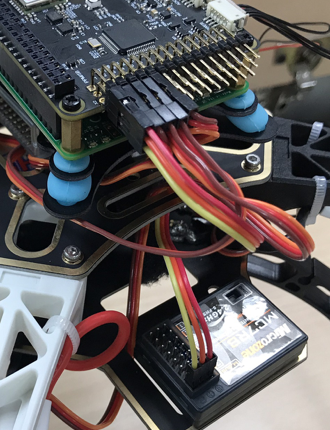
Also, please share some photos of the hardware setup. Try to disconnect drone’s hardware, leave only power for Navio2 and see if the issue still occurs.
Is there a possibility to test MP on another PC with a connection through UDP? You can also try QGroundControl and see if the issue also occurs there.
Also, can you recheck if both telemetry radios use the same configurations?
test MP on another PC with a connection through UDP/telemetry
QGroundControl with a connection through UDP/telemetry - YouTube
but still always lost connection.
I found that if the LED on Navio2 turns to solid yellow or no light, I will lost connection from it. I don’t know what the two conditions mean with the description of the link. LEDs Meaning — Copter documentation
I am not sure if something wrong with my Rpi board so I have booked a new Rpi 3 Model B+ board, and will try it when I get it.
Could you give me other ideas to solve it? thanks.
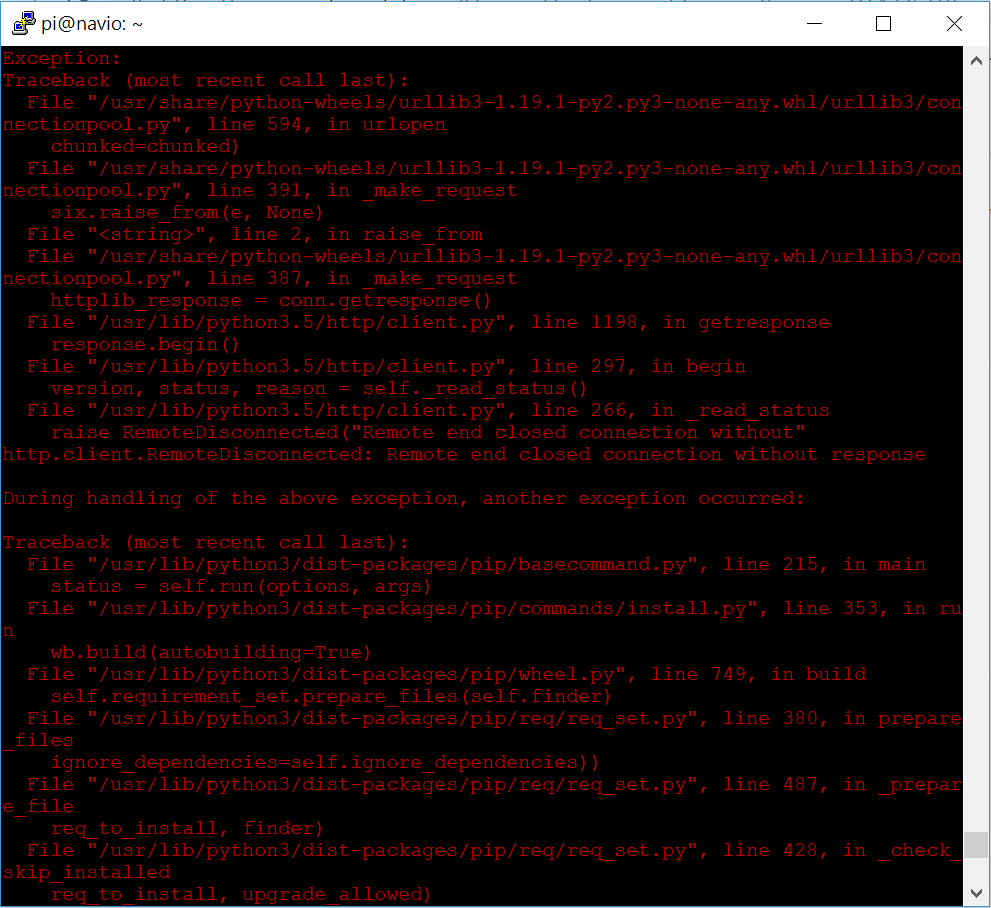
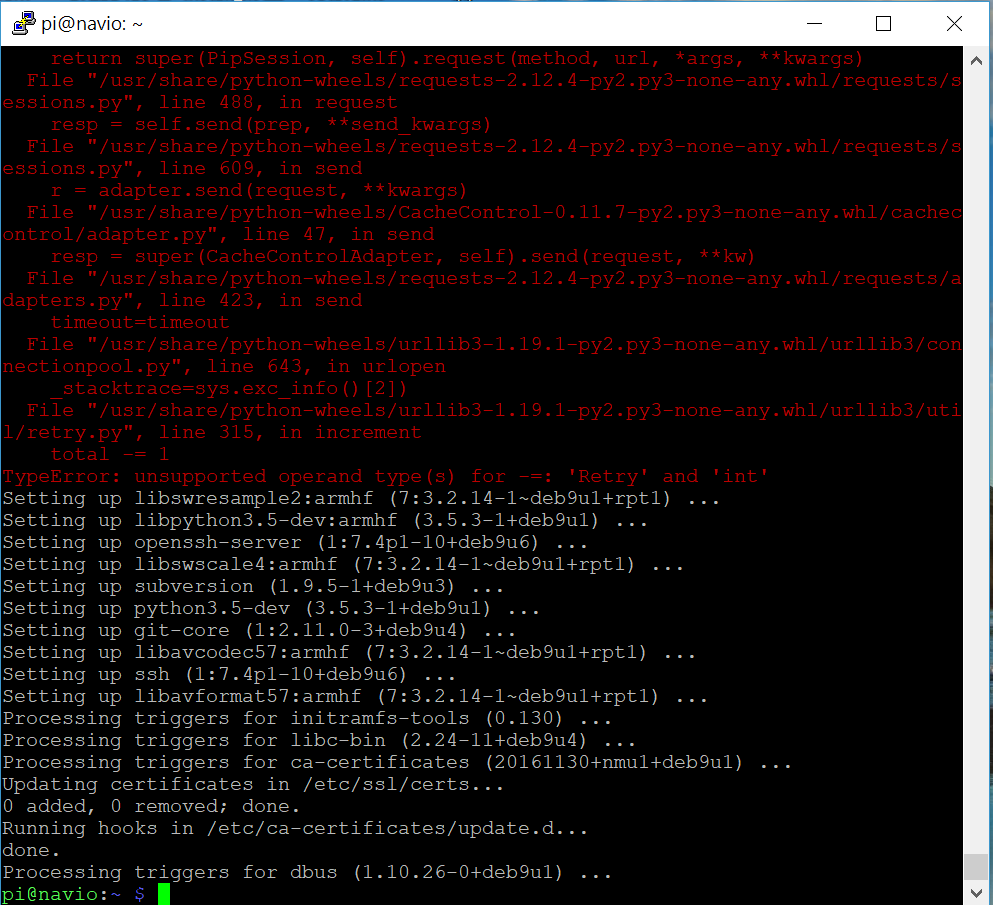
And I tried reflash image and successfully use pip3 install emlidtool with this command at first.
I don’t know if I have to update or not so just both of them.
Unfortunately, I got the same result…
lost connection when the LED turns to solid yellow or no light.
This is an error message during apt-get update command.
I’m not very sure if the issue appeared from the beginning or not because I just can’t connect NAVIO2 with MP in first several times. After I could connect it, I just stuck with the issue.
Can you please reflash the SD card once again with the image @gleb.gira shared above?
Don’t run sudo apt-get update && sudo apt-get dist-upgrade command after reflashing.
Then please try to connect it to MP once again and report us about the result.