Since OS Net in the UK updated their network to deliver RINEX 3.x files it’s no longer possible to download either a full day or a span of hours of RINEX 2.11. We have found RINEX 2.11 to be the most stable for post processing so it’s a real miss not being able to download a single file spanning several hours, instead you have to download hourly files individually. I’ve had mixed results with RTKConv but found this (rather old) utility that works great:
Back in the old days using the Garmin 12XL, I used his routines in a Corvallis Micro Technology PC5 field computer. It had an early dos operating system and you could program it in “basic” or C+ . Great field computer as I still have it from the 90’s. You could hook up via rs-232 ports. I used mine locating creek boundaries in land surveying. I used the programs Dennis Milbert wrote in the PC5 with my Garmin 12XL for field use.
Back in the office, I would download the rinex files and PP the data with our early Trimble software. We would have a Trimble 4800 base on the project site to PP with. Accuracies using the Garmin 12XL were actually pretty good for creek boundaries, usually less than 1 meter. We didn’t care about the vertical component, but I had it mounted on top of
a bipod. Occupation times locating the creek was about 5 minutes per station.
Brings back great memories… short baselines for PP are your friend.
We’re going to support multiple RINEX files uploading in our Emlid Studio software. This way, you won’t need a separate tool to merge the data. I’ll keep you posted on the news!
I’m back with the news Emlid Studio is now out of beta and supports uploading several base files for processing. Would be nice to know how it works for you!
does it only support several base files or also several navigation files?
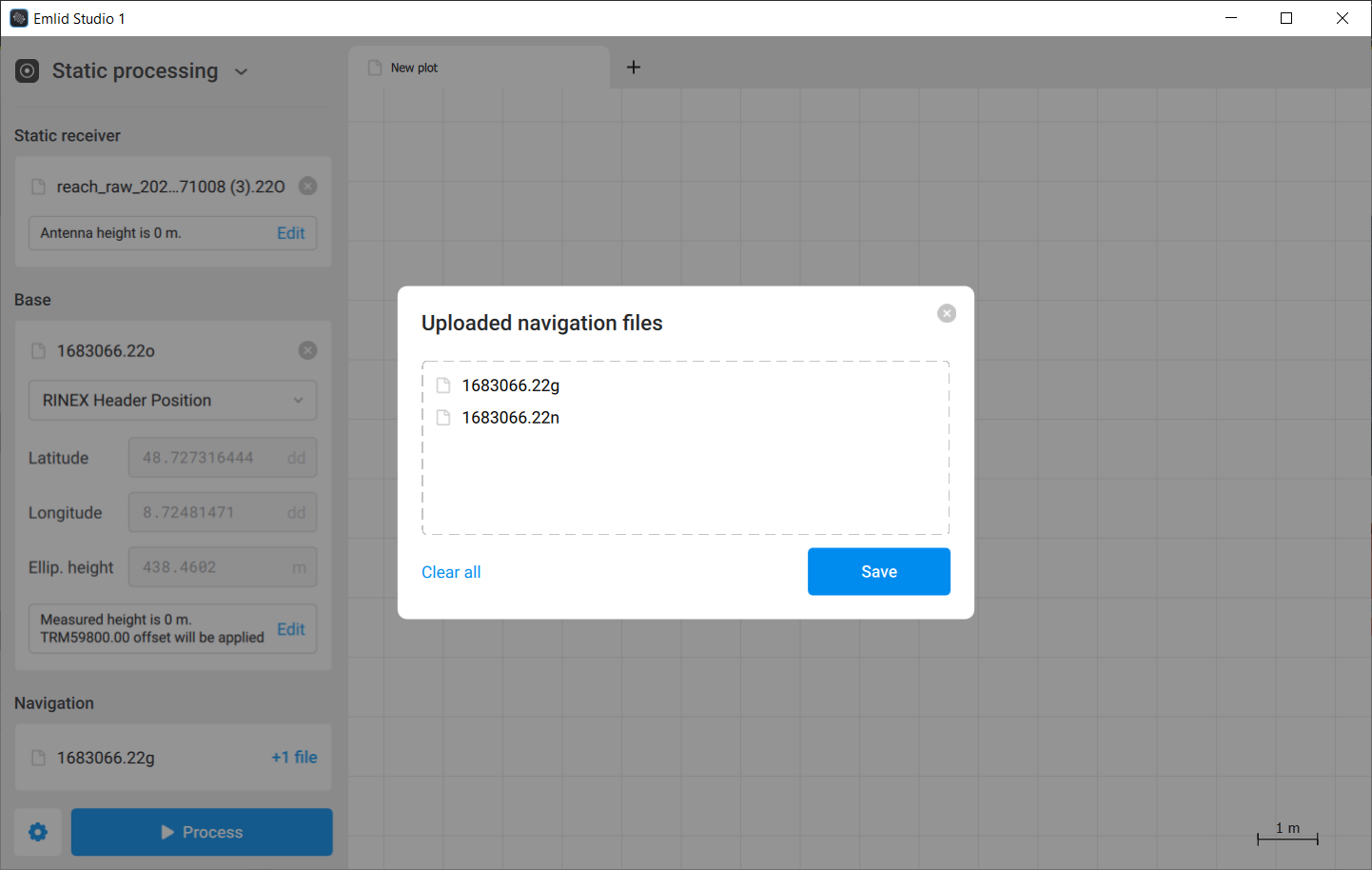
I’ve tried it with 2 nav files (.g and .n) but the both together didn’t work. (Static, solutions format lat/lon and later x/y/z).
Several navigation files should work too. Does the processing work well when you upload only one file? Do you store the files on your PC or an external storage device?
Hi Kseniia,
i tried it right away again with only one navigation file, there it worked. Now I tried it again, but the didn’t work again, the same with only one file.
If I restart Emlid Studio, it lets me process the static meassurement with one navigation file.
I will try to collect some additional data today to verify the prolem again.
Maybe @RoryG can tell us if it worked out for him?
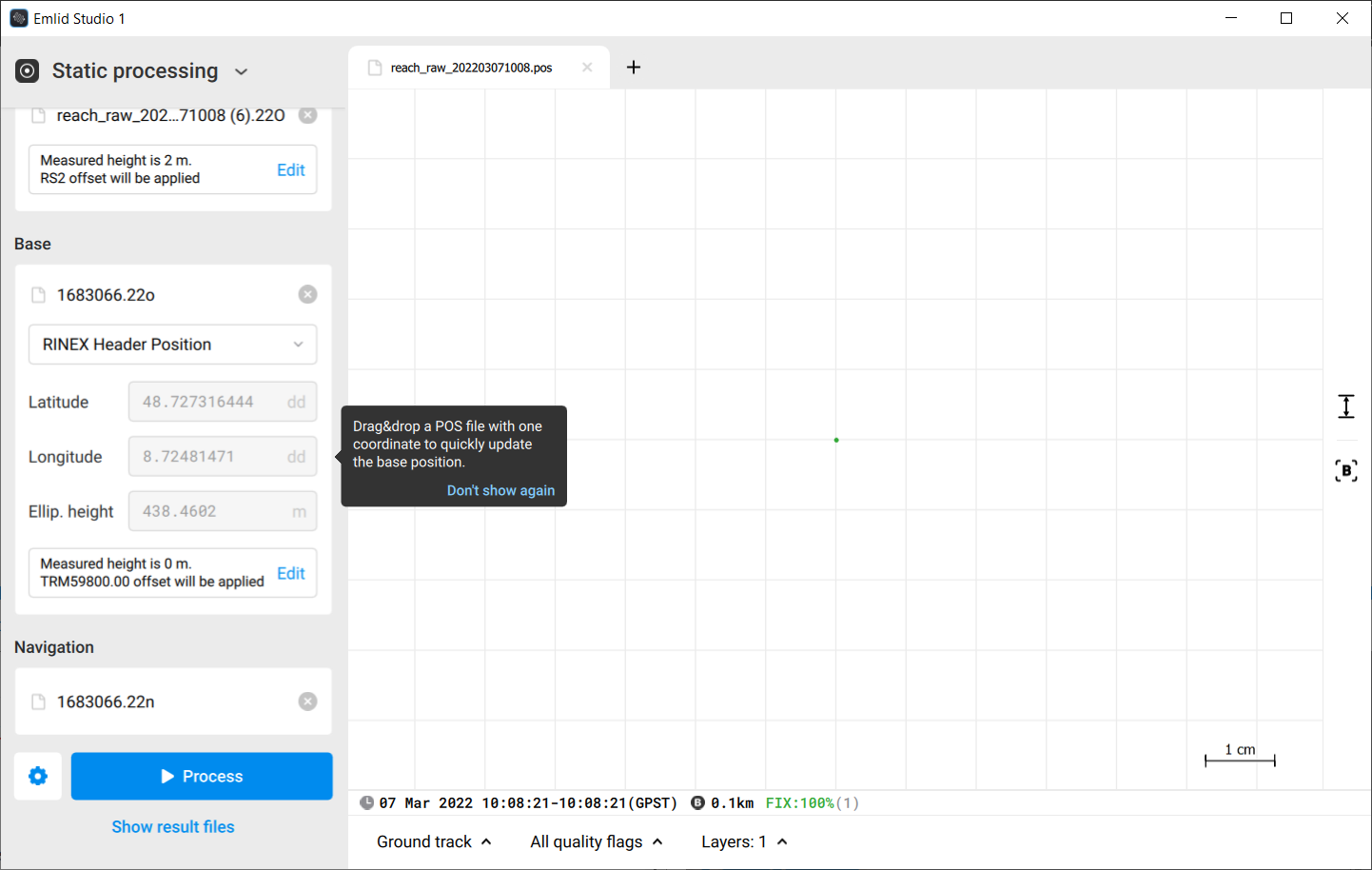
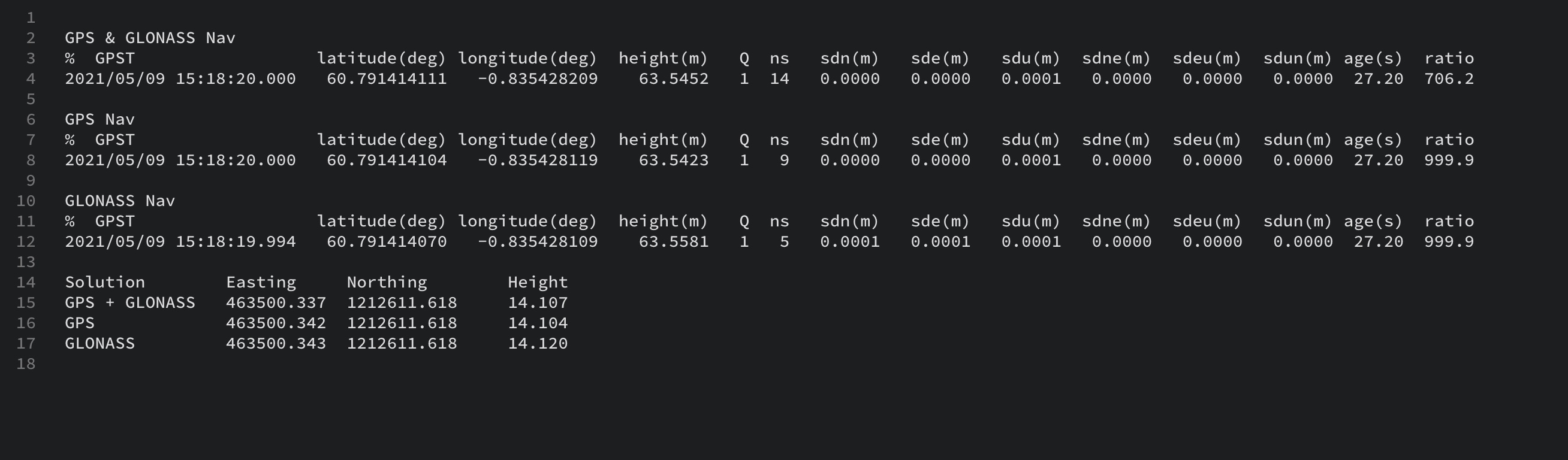
I have tested Emlid Studio with multiple NAV files from an observation we shot last year with a 75.2km baseline. The CORS only observes GPS and GLONASS so I tested it with single NAV files for both constellations, and with both NAV files. As expected the number of satellites changes for each solution, 9 for GPS, 5 for GLONASS, and 14 for the solution with both.
The three solutions are shown in the above image. The only thing I noticed is you have to restart Emlid Studio before processing the next or it will just use the files you had used in the previous solution.
I have some observations shot with four constellations (GPS, GLONASS, Galileo and BeDou) so I’ll give them a go and report back.
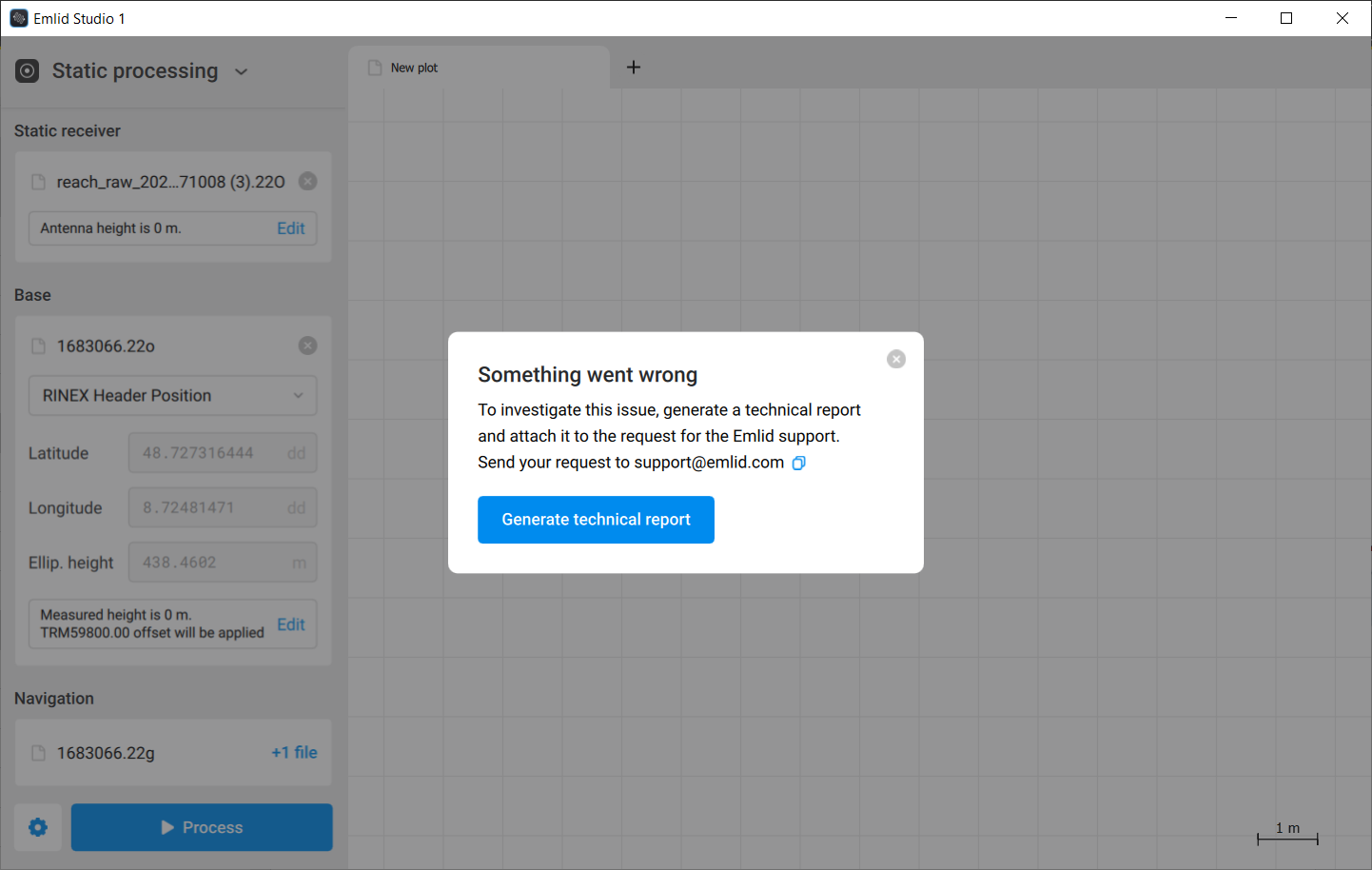
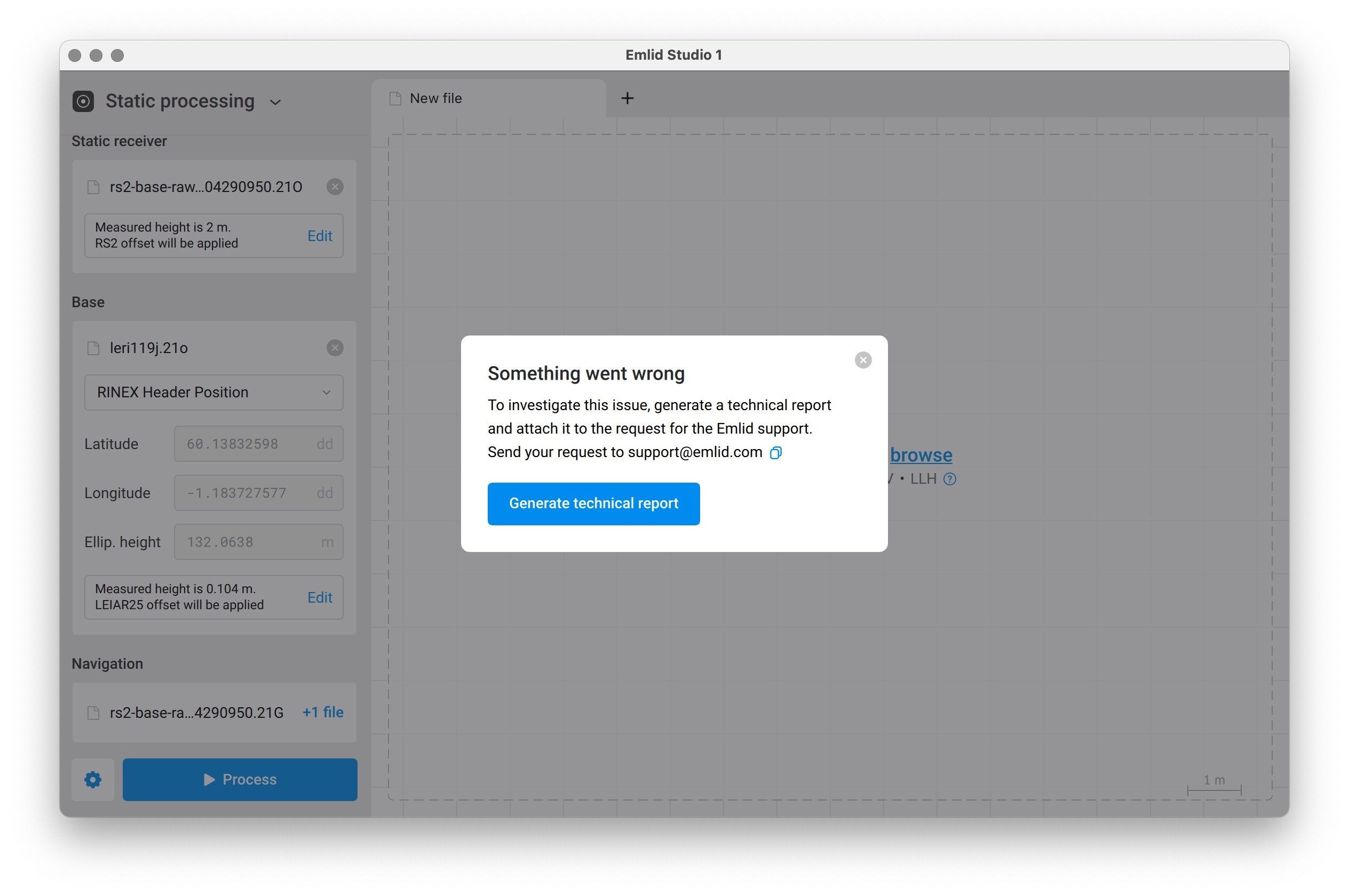
Further to my earlier reply, Emlid Studio will generate an error the same as @marius.beisswenger if the base and rover observations don’t have the same time periods.
It would be much neater if Emlid Studio gave a reason for the error rather than to contact support. I actually dragged in the wrong base file by mistake.
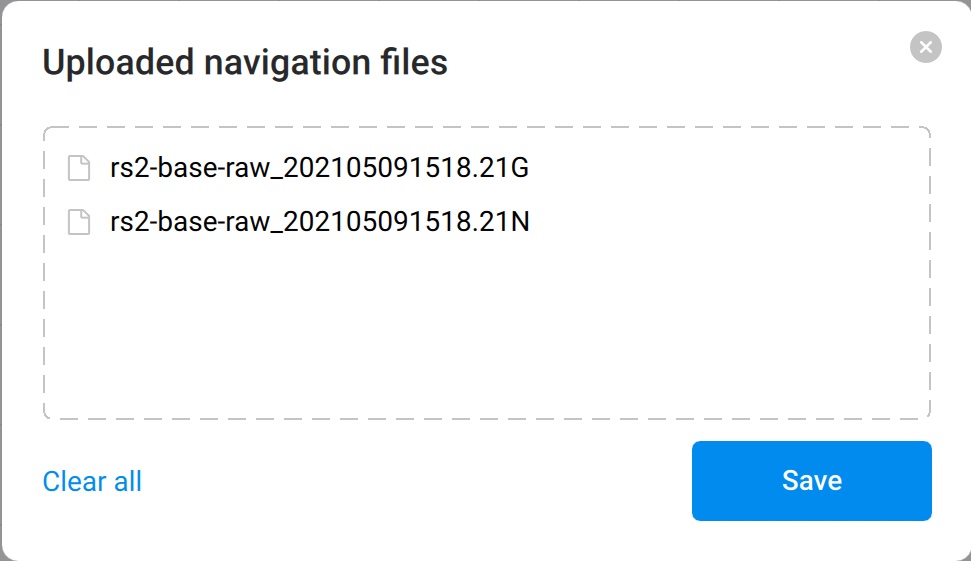
OK, I have tried using three NAV files (GPS, GLONASS and Galileo) and the error appears as soon as the process button is pressed. In fact with this observation set (base and rover are both RS2s) it will only let me use a single NAV file. Here’s the log when trying to use GPS and GLONASS NAV files from the rover:
[14:58:33.890] [default] [info] Current session logs directory: “/Users/Rory/Library/Application Support/Emlid/Emlid Studio/logs/29.05.2022_14-58-33”
[14:58:33.890] [default] [info] Emlid studio 1
[14:58:33.890] [default] [info] OS: “macOS 10.16”
[14:58:33.890] [default] [info] OS language: “British English”
[14:58:33.890] [default] [info] Build CPU architecture: “x86_64”
[14:58:33.890] [default] [info] Current CPU architecture: “x86_64”
[14:58:34.036] [SentryClient] [info] Database uses this path: /Users/Rory/Library/Application Support/Emlid/Emlid Studio/sentry
[14:58:34.036] [SentryClient] [info] Debugging: enabled
[14:58:34.036] [SentryClient] [info] Symbolize Stacktraces: enabled
[14:58:34.036] [SentryClient] [info] Enviroment: Darwin
[14:58:34.036] [SentryClient] [info] Uses this handler: /Applications/Emlid Studio.app/Contents/MacOS/crashpad_handler
[14:58:34.036] [SentryClient] [info] Release: v1
[14:58:34.056] [SentryClient] [info] Started!
[14:58:34.099] [AntexFile] [info] Checking for updates…
[14:58:35.807] [ProcessingManager] [info] ServiceFactory has started
[14:58:35.853] [AppUpdaterMacOS] [info] appcast.xml URL: “Emlid Studio”
[14:58:35.853] [AutoUpdateManager] [info] Checking for updates…
[14:58:36.072] [AntexFile] [info] ATX file is s up-to-date
[14:59:13.085] [RinexPreprocessor] [info] Found antenna type “EML_REACH_RS2”
[14:59:36.718] [RinexPreprocessor] [info] Found antenna type “EML_REACH_RS2”
[15:00:00.164] [RinexPreprocessor] [info] Found antenna type “EML_REACH_RS2”
[15:00:12.062] [ServiceFactoryClient] [info] Successfully created a service “[ServiceId = uniqueId:1, type:PostProcessing]”
[15:00:12.064] [PostProcessingTracker] [info] finished: “[Result = type:0, value:[SolutionFiles = solutionFile:"", eventsFile:""], errorMsg:Failed to prepare input files]”
[15:00:12.064] [PostProcessingTracker] [critical] Failed to prepare input files
Which drive are you using for the files’ storage? Please check if the same error occurs when the data is on the same drive as Emlid Studio. If the issue is still there, please share the logs and the technical report with me via support@emlid.com.
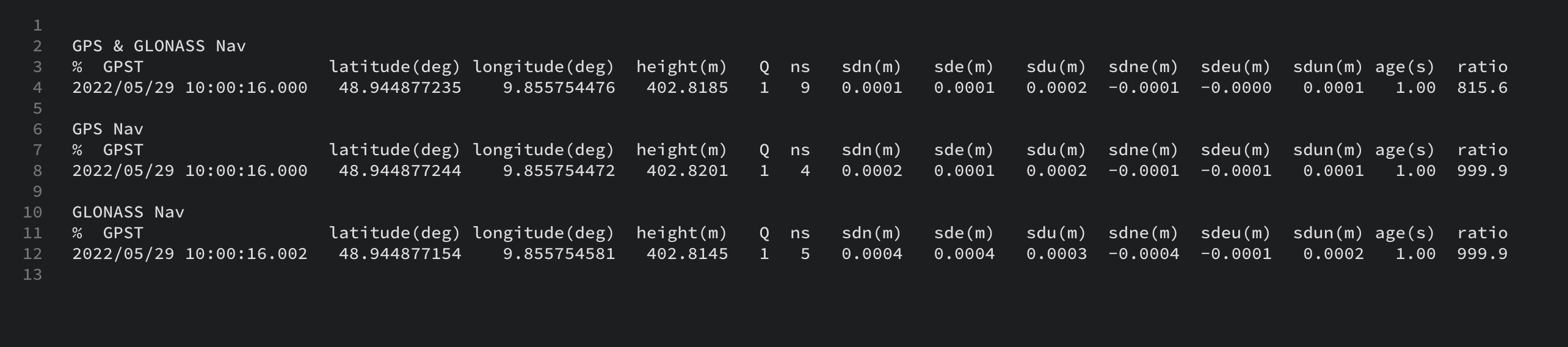
With the data of, I have been able to process 2 navigation files. But the sat number does not increase processing GPS (9 sats), GLONASS (4) and both (9). Why I olnly have 9 sats in total with both navigation file? no idea. Maybe you have an idea @kseniia.suzdaltseva or @RoryG ?
@kseniia.suzdaltseva, i just checked your question and I can verify, processing multiple navigation files from an external drive results in an error. Processing only one file from the external drive works.
Why I olnly have 9 sats in total with both navigation file?
Hard to say without checking the data. Can you please share it with me?
As for processing multiple files from an external drive, I’ve discussed it with our devs, and they’re working on a fix. I’ll let you know once it’s out.
I can confirm what @marius.beisswenger is experiencing, multiple nav files work fine from a local drive but not from an external drive. Most of my survey data is held on Dropbox which is a local folder, however some of the archive data I was experimenting with is on an external Thunderbolt 3 RAID drive.
That’s great Kseniia. One other request / suggestion! Is it possible for ES to remember the last processing type you did rather than default to Kinematic? I close ES after each process run and very often forget to change to Static. As most of the processing I do is base observations then Static would be my default - maybe even an option to save last type on exit?