Hi
sorry I tried to find some info about merging Rinex base file (I have 1 hour of observation) to perform PPK post processing but I dind’t find anything in the forum.
Can you help me ?
the question is: I have to calculate the correct coordinates of my base using the rinex from CORS but I can only download (from CORS) one rinex per hour so can Emlid Studio accept severals rinex or I have to merge before (using RTKLIB) ?
Multiple RINEX files uploading in Emlid Studio is already under development. Can’t share exact dates, but I’ll update you once this feature is out.
For now, I’d suggest you use in processing just one of the logs from CORS. If your raw data is of good quality, it should give a Fix even if the logs’ overlap is less than an hour. So I’d simply choose the file with which time overlap is greater.
Ok thx
I have another question about the quality of the post processing results using Emlid Studio.
I noticed some difference if I process the Kinematic data using Virtual Rinex or “normal” Rinex.
Do you have some experience ? The algorithm to calculate the result must be different if I use the virtual rinex?
This is the comment present in the virtual rinex
"This is a Virtual RINEX observation data file!
The observation data contained in this file has been computed by X-pos for a user defined location based on network correction information provided by a Leica GNSS Spider network.
For use in post-processing software please ensure using the correct processing settings to process network corrected observation data.
From the Emlid Studio side, there is no difference in the algorithm for processing files from a real or virtual base. The main requirement for the logs is to be in the RINEX format.
Can you share rover’s log and logs from both bases with me? Processing and comparing these files will help me give you more specific comments about the difference in results.
Yep, I’ve just checked the files from you and can share the results.
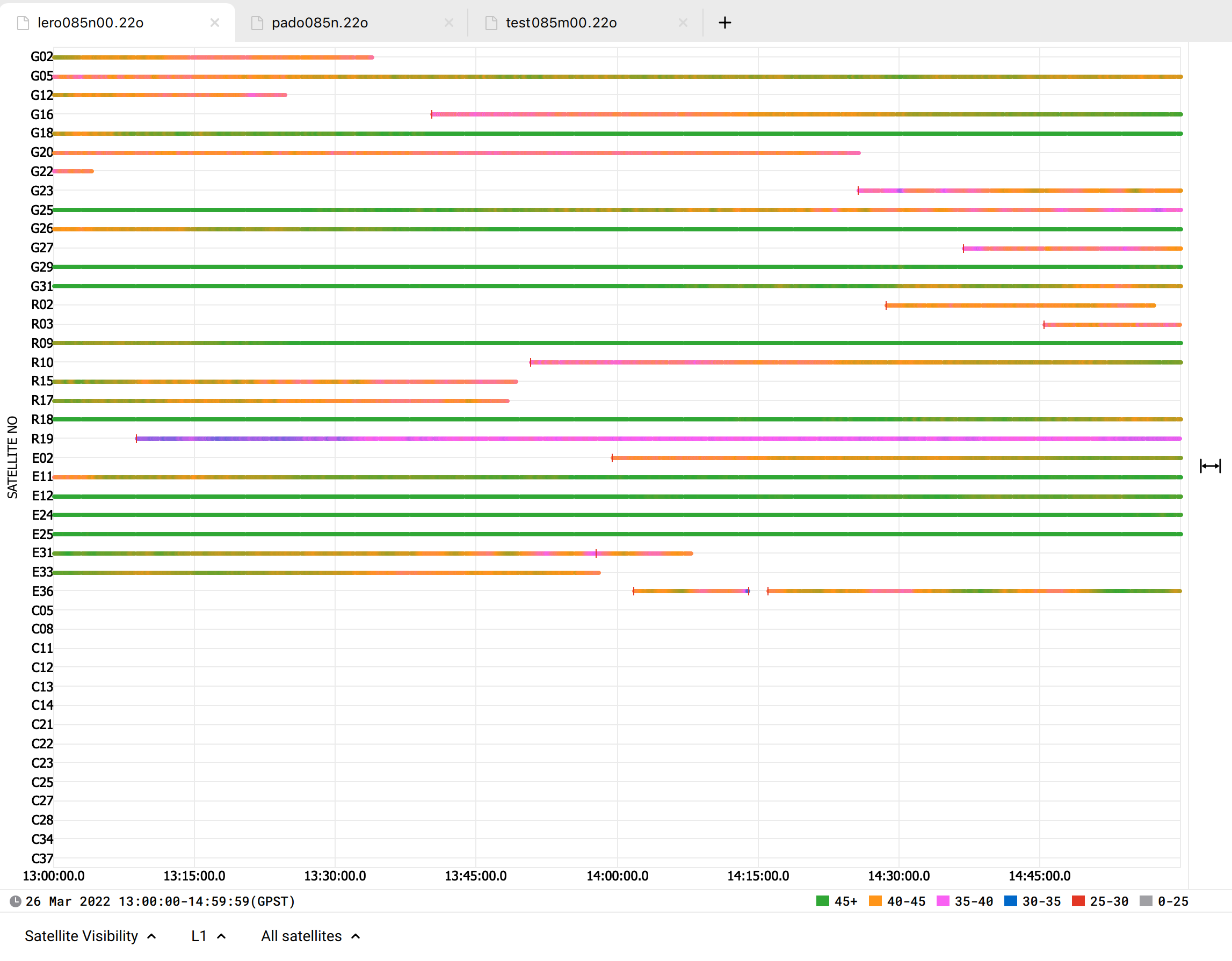
I’ve started with opening raw data logs in Emlid Studio. As for me, all 3 logs from different bases are good enough. I’ll attach here just one of them as an example. To check the rest, simply open other observation files in Emlid Studio.
SNR for L1 is higher than 35. It decreases and increases steadily. And there are just a few сycle slips – red marks on the log that indicate that the signal was delayed or disrupted. Mostly the logs are clear.
Rover’s log is a bit poorer. It has more cycle slips and satellites with an SNR lower than 35. And when I post-processed the data on default settings, the results with different bases varied from 27% of Fix with the virtual base to 60% of Fix with the LERO base.
That’s why I’ve decided to play with the settings and set the filter type to Combined. It made Emlid Studio go through the raw data forward and backward and combine the results. And it did the trick! PPK with virtual base gave 98.5% of Fix, LERO base – 98.8%, and PADO – 87.2%. In Stop & Go, each dataset also provided a Fix for all the 10 points.
Hi Julia
thx for feedback
One question what is the distance between the points ?
I noticed that the distance (in x-y) for the points with fix it’s high (4-5 cm)
Rover’s log is a bit poorer. It’s means that for stop&go approach I need at least … 20, 30, 60 minutes of observations ?
Can you suggest the best practice ?
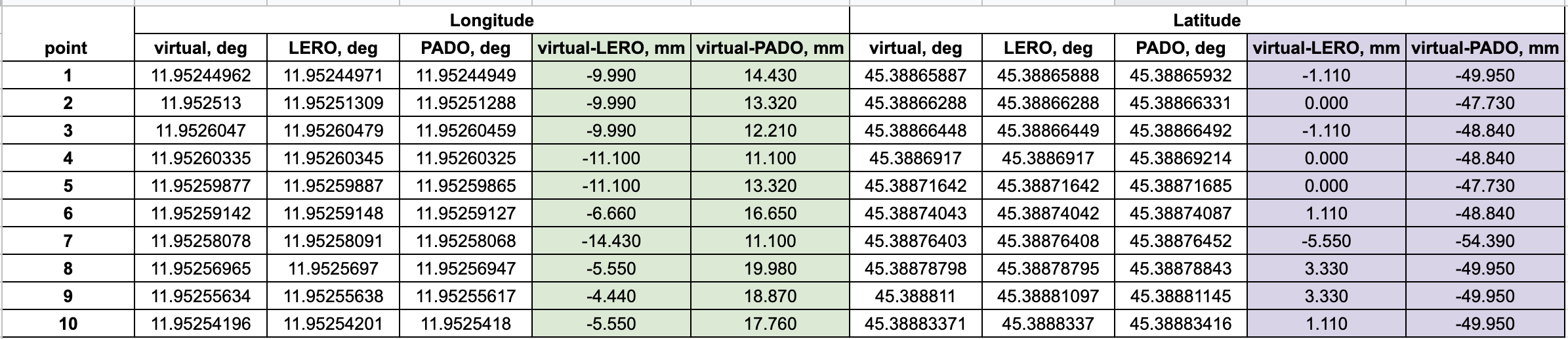
I see that position achieved with a virtual base differs from coordinates with a PADO base. But the difference is nearly stable for all the points: for Longitude, it’s about 15 mm, for Latitude – about 50 mm. That’s why I assume it may be related to the accuracy of the base position. When the base is shifted, all the points collected with the rover have the same shift. You can read more about it in this article.
Also, don’t forget that positioning accuracy depends on the baseline. For Reach RS2, PPK accuracy is 5 mm + 0.5 mm for each 1 km of baseline horizontally.
Usually, 20-30 seconds per point is more than enough. Longer observation time can improve the result, but it is powerless if raw data logs are poor. That’s why a clear sky view without any obstacles can improve the results most.
We’ve discussed it with Francesco in this thread, but I thought to post an update here in case someone bumps into it.
Starting with Emlid Studio 1.1 version, you can upload several observation files from your base to process them at once. It should work fine. But if you face any issues with it, feel free to start a new thread or write to us at support@emlid.com. We’ll look into it.