



Hi Barry,
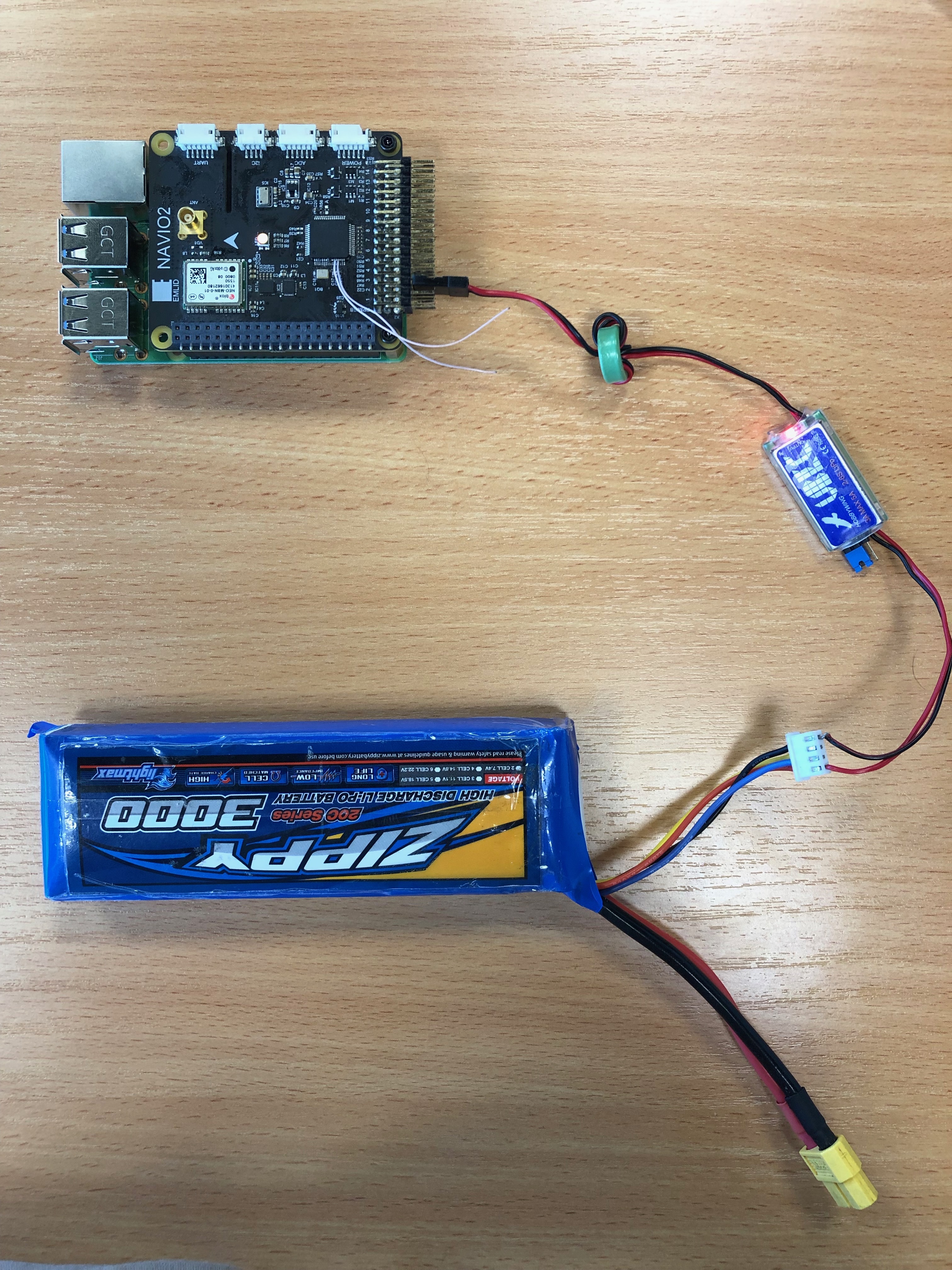
We tried to replicate your power connection scheme and supplied the Navio2 with power over the Servo rail using Ubec:
We used the following settings in QGC:
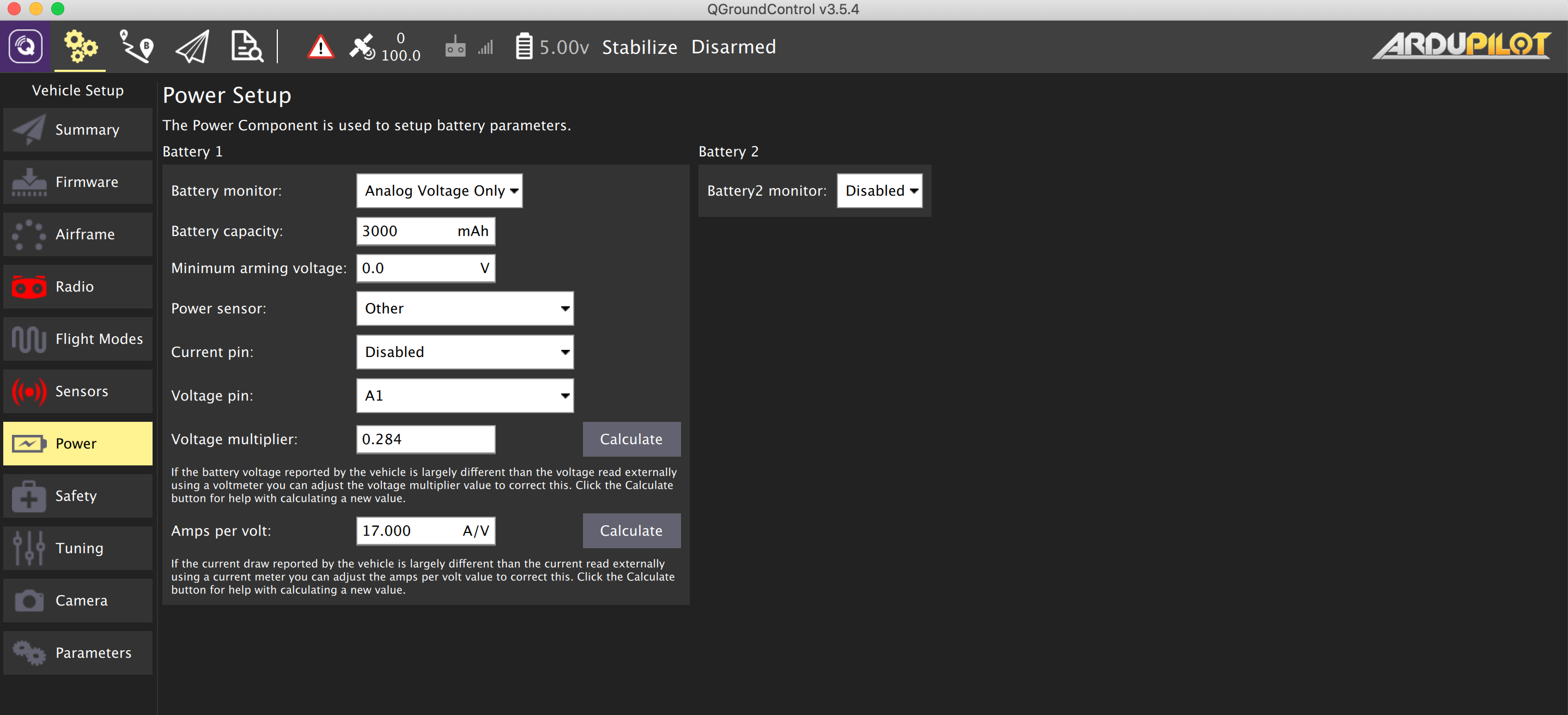
And this setup seems to be working nicely. The voltage sometimes changes from 4.9 to 5V, however, it’s a normal behavior.
May I ask you to try the same multiplier as we tried? Is there anything we might miss in the setup?