



Before creating a new thread please refer to the documentation for Navio2 and Navio+.
In case you are creating a thread about an issue it is necessary to provide following information to get help:
- Image and ArduPilot version.
- Detailed problem description. How does observed behavior differ from the expected one?
- Your step by step actions.
- Picture of the setup and connection scheme.
- If using any additional hardware please provide exact make and model.
Hi guys,
I’m making a Navio2 and RPi3B+ drone with an FS-iA6B receiver - Using MissionPlanner.
I wanted to be able to control the drone with python scripts hence got into downloading DroneKit, pymavlink and MAVProxy to get started.
Followed through with these commands:
sudo apt-get update
sudo apt-get install python-dev python-opencv python-wxgtk3.0 python-pip python-matplotlib python-pygame python-lxml python-yaml libxml2-dev
sudo pip install future
sudo pip install pymavlink
sudo pip install mavproxy
Question 1)
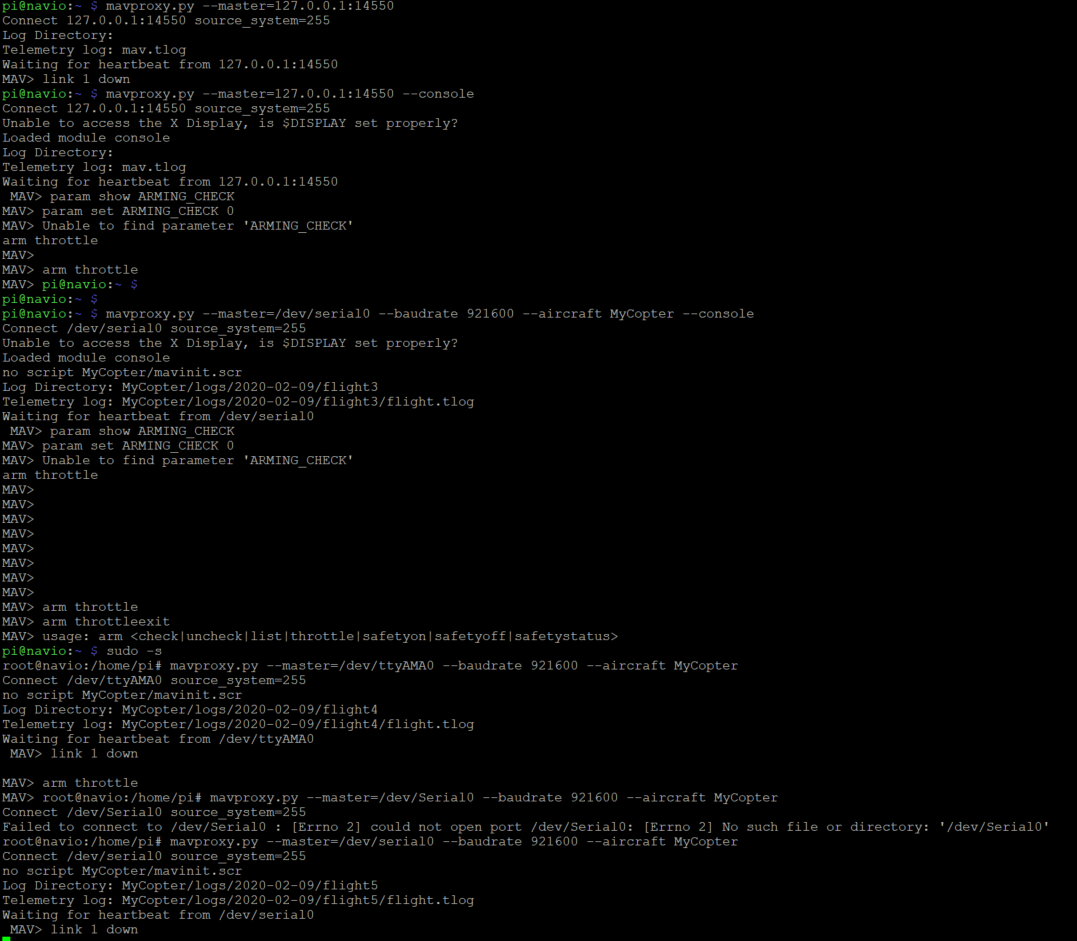
When I connect through 127.0.0.1:14550 everything seems fine, but I cannot run the command arm in the MAV prompt?
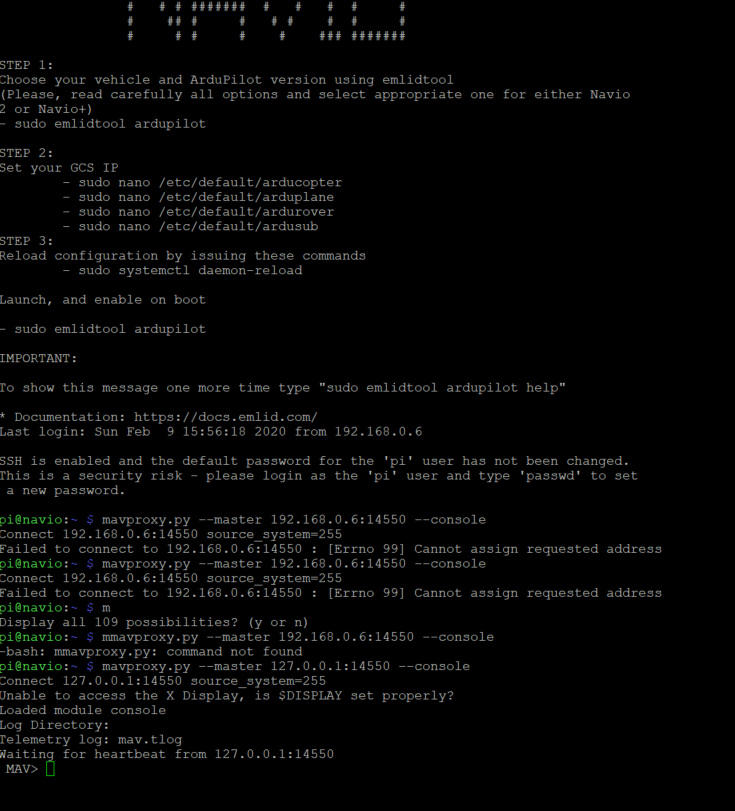
Tried another command:
through the serial ports ttyAMA0 or serial0
where I add --console to the end of the command link 1 is not down and otherwise it is… What does --console do??
How can I control my drone with a python script - please guide me?
I am open to new suggestions.