Hi,
I have configured 2 M+, one base and the other rover. The correction is send through LoRa.
I can achieve a FIX status quite rapidly when both M+ are static but when I move the rover I obtain a FLOAT status. I have configured a max acceleration of 5m horizontally and none vertically.
Both are configured with 5hz rate.
That doesn’t sound like normal behavior for Reach devices. I’d like to investigate why it may happen. Would you mind sharing some data so I may look into them?
First of all, I need the following data from the devices recorded during your test:
It’d be great if you could just generate the Full System Reports on both units and send them to me in PM. The information in the reports will help us see the settings as well as determine the cause of the issue.
The information about enabled RTCM3 messages will help me check if there’s anything missing in the data received on the rover. After it’ll be easier to understand what could go amiss.
Looking forward to receiving the Full System Reports.
I’ll delete your message as the report may contain sensitive information. We’ll look into it and I’ll get back to you with news.
Regarding your questions, the rover position is relative to the base position. It means that if you establish the base’s coordinates with the Average Single, it’s absolute accuracy is meter-level. So is the absolute rover’s.
If you require absolute centimeter-accuracy on the rover, you need to know the base coordinates with the centimeter-level accuracy as well. For that, as you have mentioned, you can use the NTRIP corrections.
Hi @polina.buriak,
I got good results with the new firmware, got a FIX with my rudimentary setup.
It seems more stable than before. I can’t test it on the final setup (on a USV) but I think it will be OK.
Thanks for the test! It seems like the latest update is working well for you.
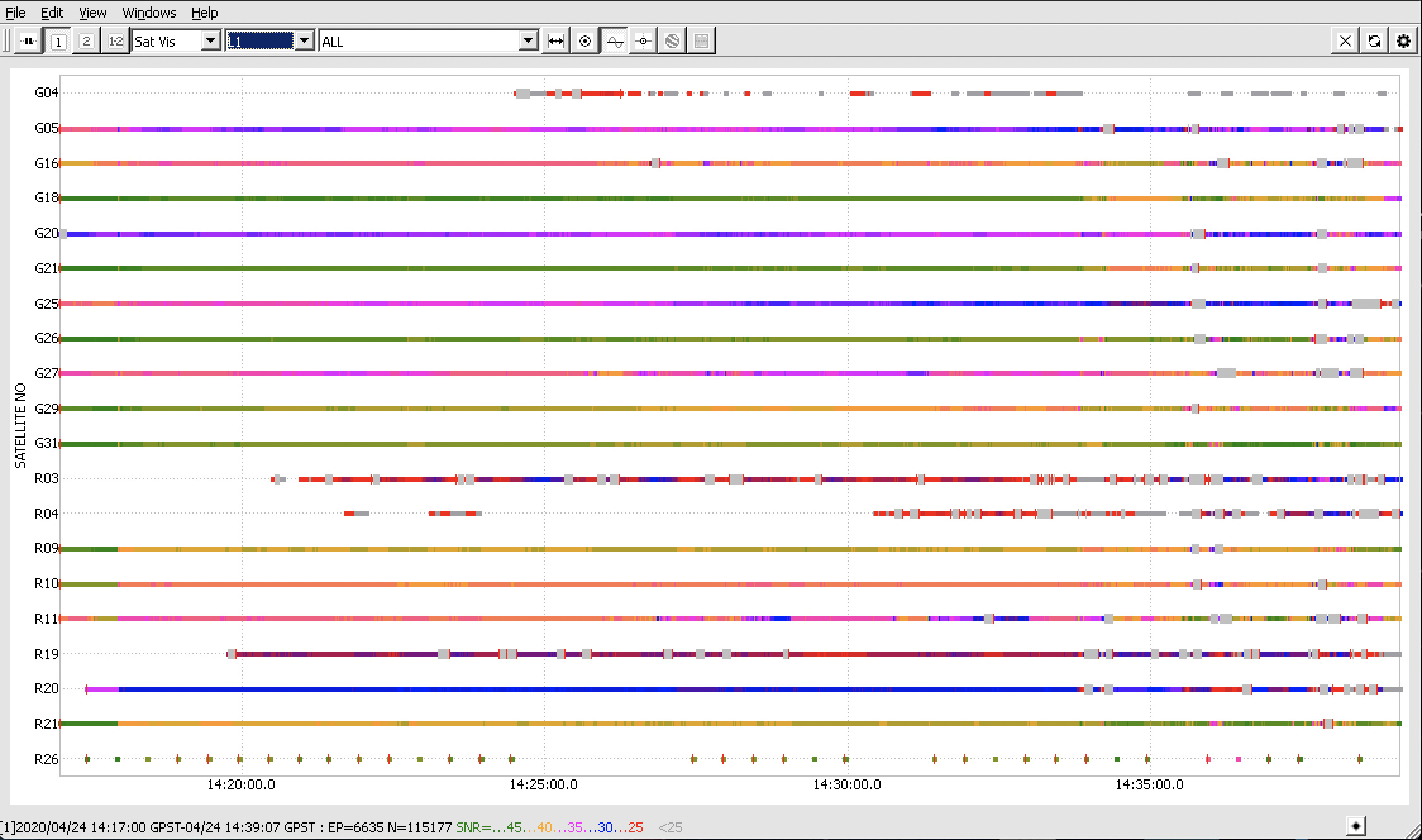
However, I can see that you use GPS and GLONASS only. It means that both base and rover simultaneously see only 5 satellites with SNR around 45 (G18, G21, G26, G31, R09). I’ll attach the screenshots of the logs below.
This might cause some difficulties for the rover to obtain the fix. So I’d recommend enabling more satellite systems for your tests so that the rover can use more data for the calculations. This will help increase the stability of the Fix solution. Our default recommendation is all satellite systems (GPS + GLONASS + Galileo + SBAS + QZSS) enabled at 1 Hz for the base and at 5 Hz for the rover.
It’d be great to see your results with the final setup and on the moving rover!