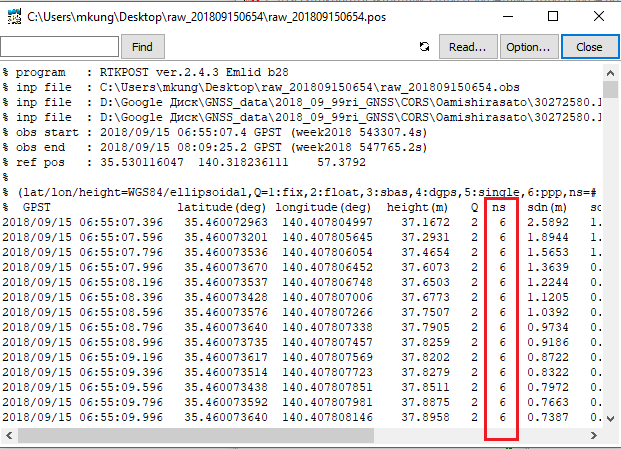
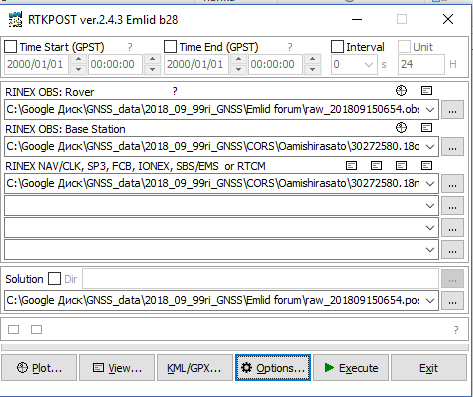
Hello. I am trying to get consistent result with PPK, but unfortunately I get .pos file with small amount of satellites (ns value in .pos file) - I get fix or float only with 6-7-8 satellites. Moreover, sometimes if it is fixed - results are inconsistent. I assume that only data from GPS sattelites are processed, while .obs file from rover and .o file from CORS include GPS, GLONASS, GALILEO and QZSS data. So I can receive strong signal from at least 12-15 satellites at any time. I have tried bunch of different versions of RTKLIB - from Emlid, original 2.4.2 version, newer version from Github(2.4.3 b30). While 2.4.2 and 2.4.3 b30 fails to give me proper .obs file (I get .obs file only with GPS data), Emlid version at least gives me proper .obs file. But then I struggle with RTKPOST. It just so random - I once had proper .pos file with around 15 satellites (ns) with old 2.4.2 version, then I have tried repeat it with Emlid version of RTKLIB - got only 7-8 satellites. After i tried to play back with old 2.4.2 - nope, again only 7-8 satellites and inconsistent result.
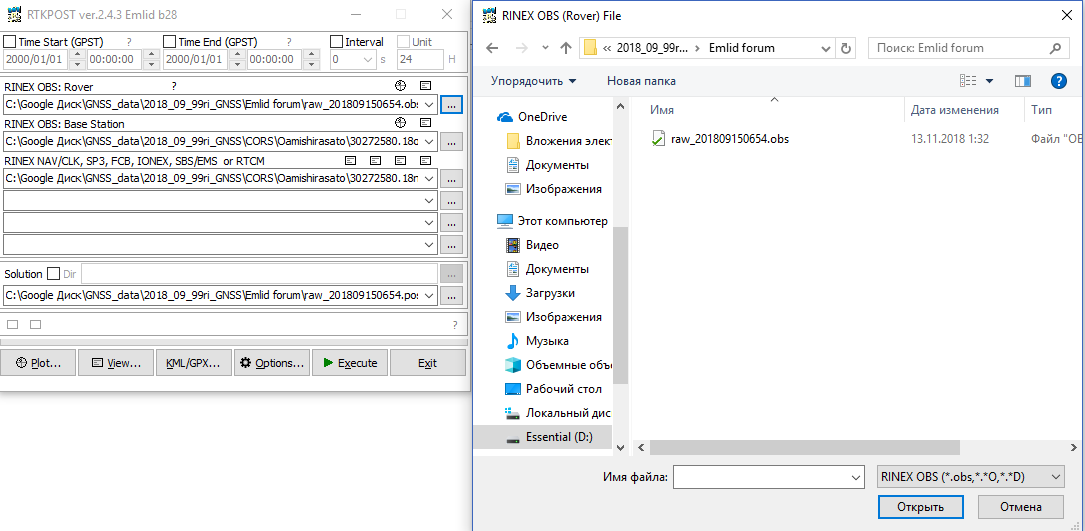
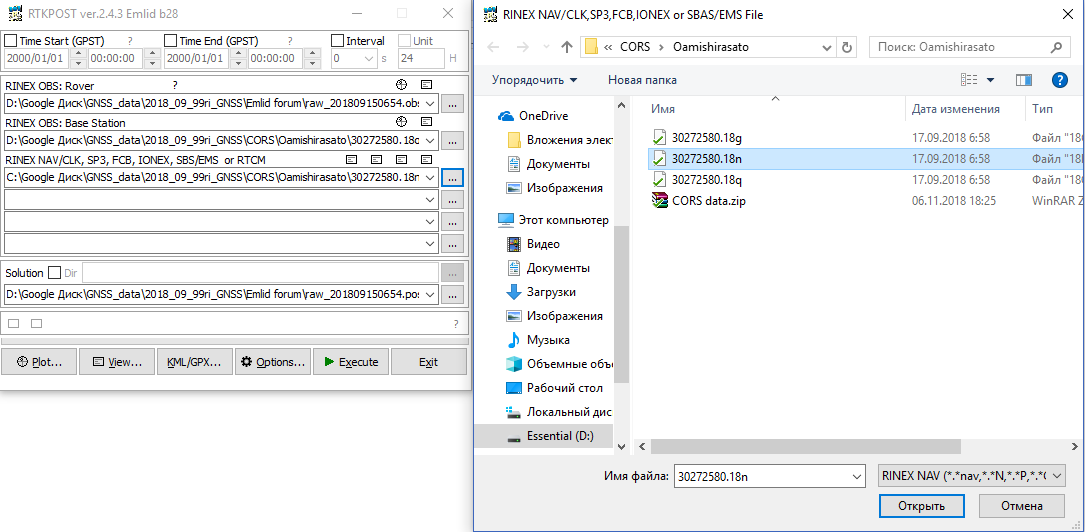
I have uploaded to Google Drive .obs from rover, files from CORS (got it from Geospatial Information Authority of Japan) and config file for RTKPOST, which I use. I will appreciate any help.
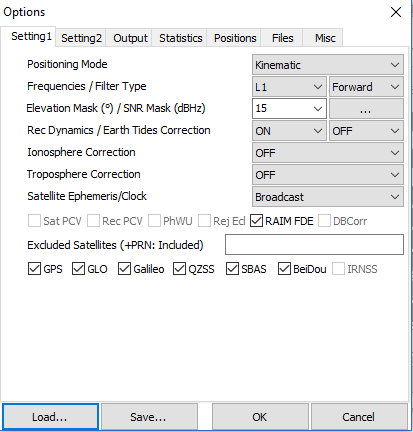
UPD. I have found topic with similar problem on this forum, but seems like that solution does not help me - I do not use “Broadcast + SBAS” or “Precise” in settings.
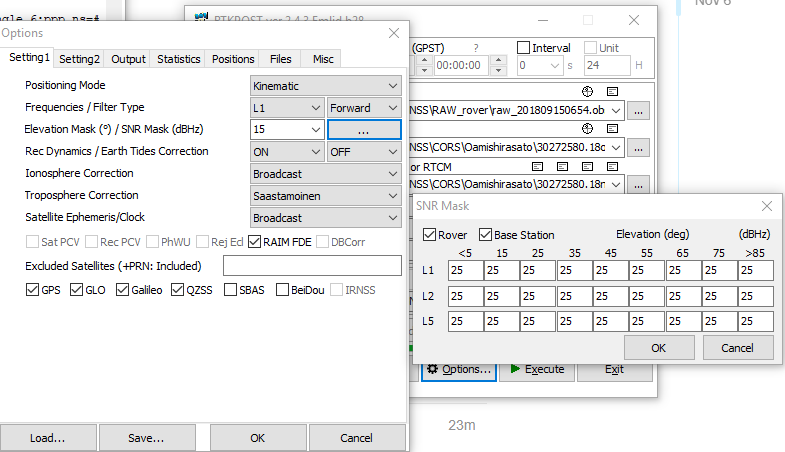
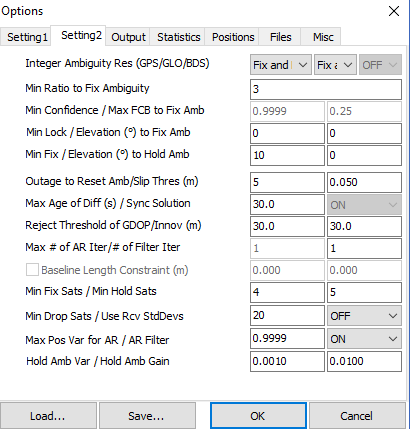
Most significant change probably - switched Ambiguity Res for GLONASS from “on” to “fix-and-hold”. Thanks to article of rtklibexplorer - i can not leave it “on”, because CORS and reach are different type of receivers. Anyway, I still get 6-7-8 satellites. I have tried to switch it to “off”, but nothing changed, so I will leave it “fix-hold” for a while, as rtklibexplorer recommends.
Here is a thing - I do not have raw logs from base, because survey was made in RTK mode for UAV SfM purposes. But .csv files from RTK survey are kinda broken, so RTK results useless for georeferencing in Agisoft. So i tried to use raw logs from rover. Thanks god I have turned on logging at least on rover, but I forgot to turn on it on base. So instead of base’s logs I am trying to use CORS logs from Geospatial Information Authority of Japan. Somehow I have screwed up with georeferencing, so I am desperately trying to fix it.
I have uploaded .ubx file from rover to Google drive, but I can’t upload .ubx from base, because I do not have any. ¯_(ツ)_/¯
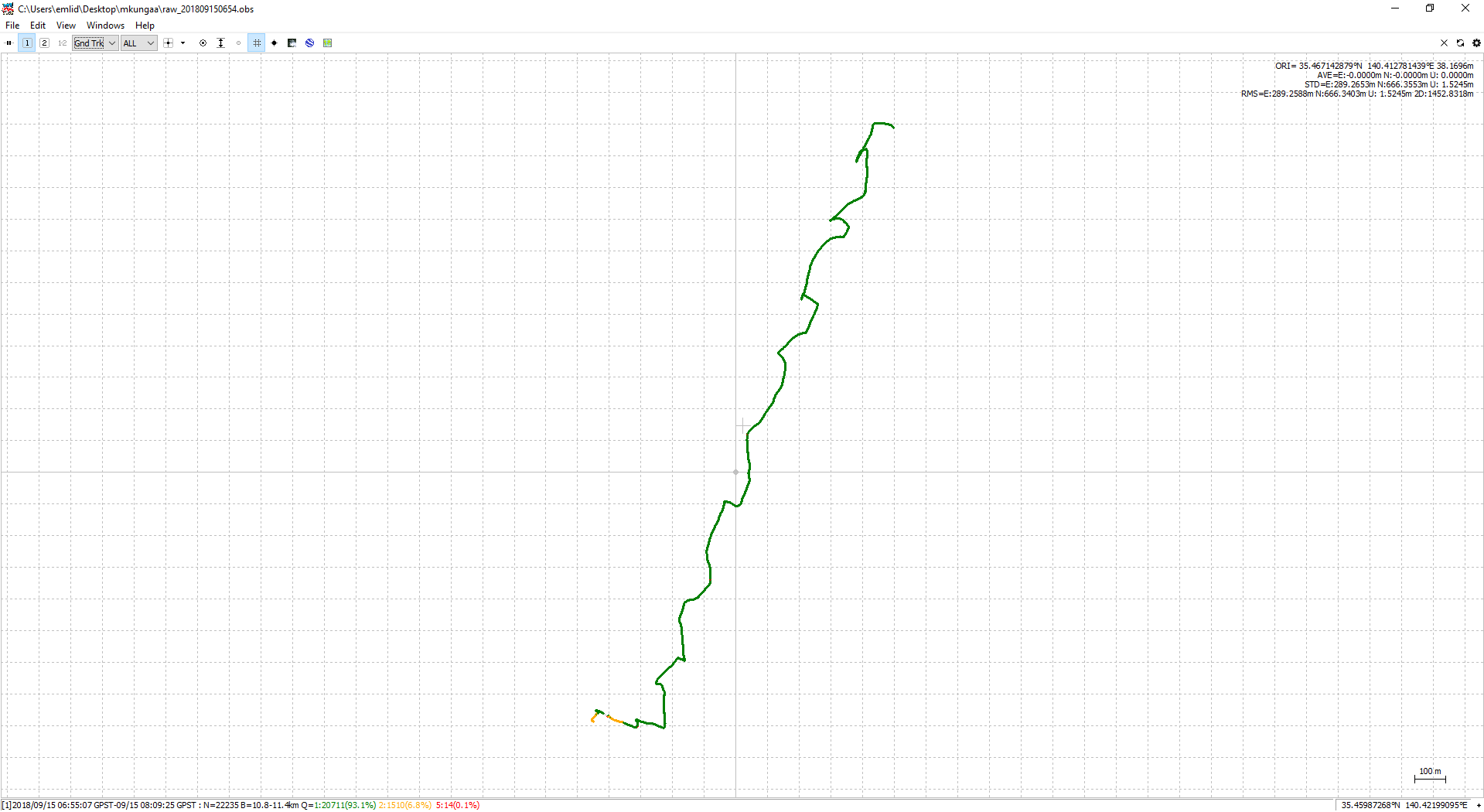
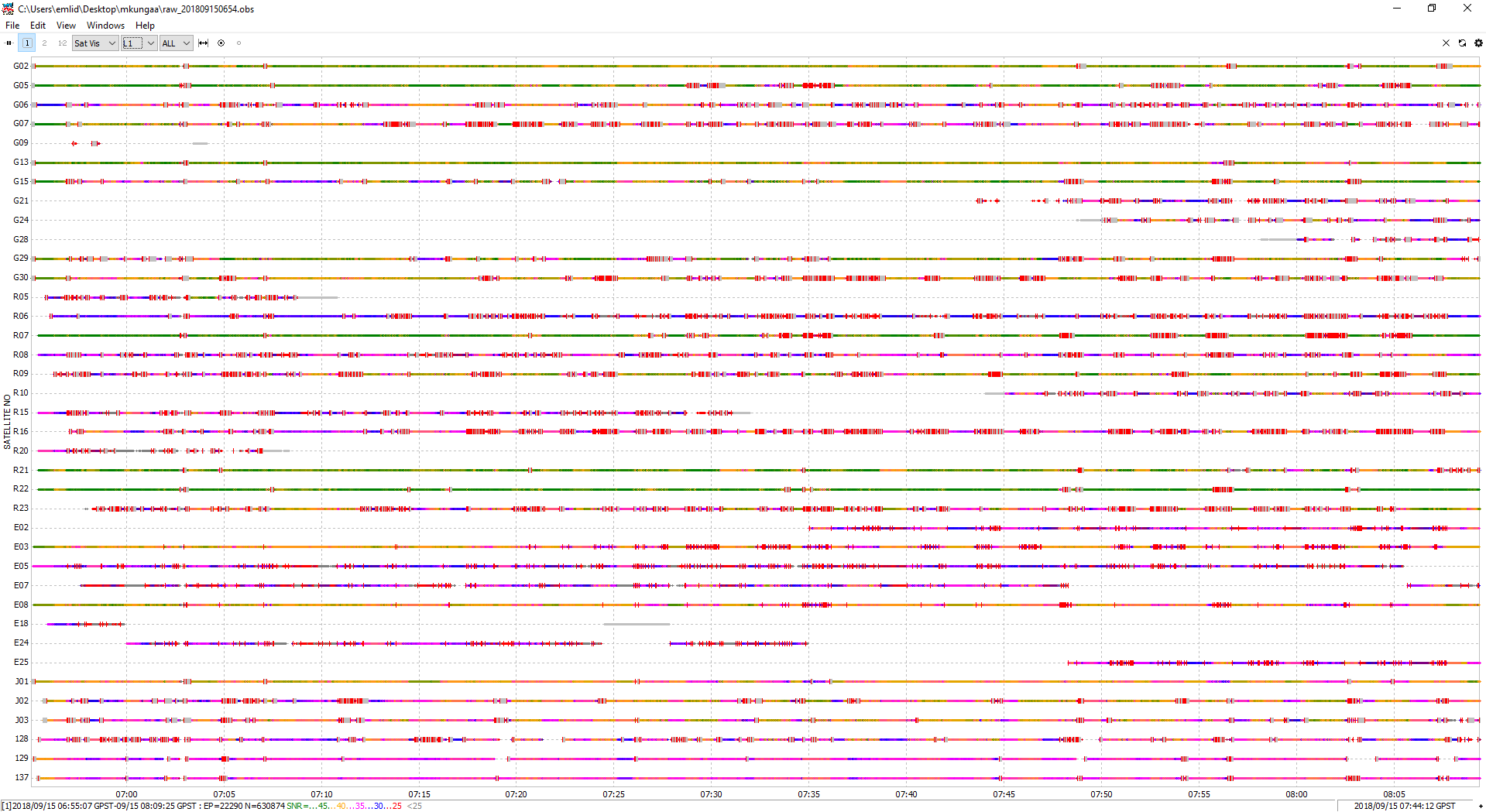
However, you’ve got a lot of satellites but satellite view is poor with a lot of cycle slips.
What hardware setup do you have? What’re environmental conditions?
What about amount of satellites used for PPK (ns parameter)? Could you upload .obs and RTKPOST’s config file to somewhere? I want to compare with mine. I get much less fix result and more float. I will really appreciate it.
We have used Emlid Reach with antenna mounted on 10x10 cm stainless steel plate connected to survey monopod. The thing is that it was RTK survey, and never intended for PPK. We were keeping rover on point just enough time for RTK fix. But somehow RTK results are terrible and not usable for UAV SfM.
Sorry, I have misleaded you. I am talking about ns parameter(as I understand - it is amount satellites used to get FIX) in .pos file. Can I see your .pos file too? I usually get normal .obs with a lot more than 20 satellites, but problem wit .pos.
I will DM to you, when I get to university. Unfortunately, it won’t happen until next week.
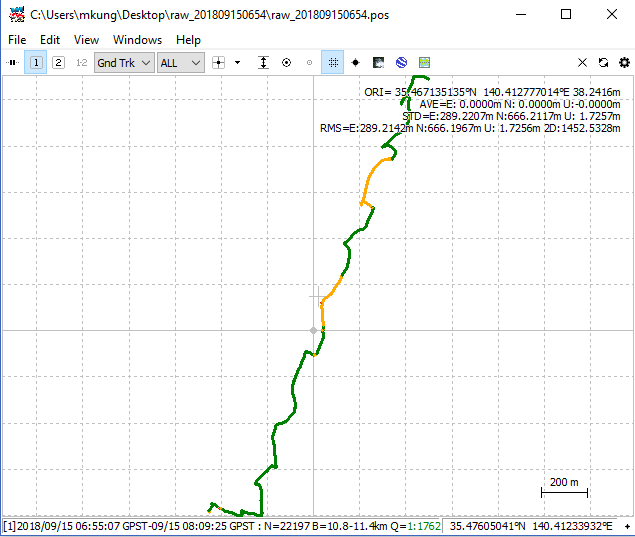
As you can see 6 (max 8) satellites participating in process of getting FIX. It is not clear why such a difference between your and mine results occurs. Is there any chance that hardware affects results? I have no other clue…