I swear I had this working, I want to use a Reach as a base station and a Javad Delta as a rover. A couple of weeks ago I was just farting around not taking notes and I used a raw tcp connection to sync the two and get a fix. Then I switched the two and fixed. Now that I want to I can’t duplicate the results. Is it possible to do this, or was I dreaming?
The Delta is L1/L2/GPS/GLONAS both have the latest firmware.
Also, I’m getting messages on the Javad but it stays in a stand alone position. Here is a simple report from the Reach:
Curious, is it better to have the Reach RS (L1 only) as the ROVER or the BASE? And vice-versa for the L1/L2 receiver? I guess the ROVER would perform better (faster fix etc) if L1/L2? Or should the BASE be L1/L2? I assume benefit would come from ROVER as L1/L2? Just curious is all. ; )
Heck yea they’re ridiculously expensive, that’s why we’re looking at the Reach as a base station. It took me 9 months to convince these guys that Reach can do it and I swear I had it working a couple of weeks ago as mentioned in my original post but I didn’t take notes and I can’t make it work now. Both devices get a fix from separate base stations but they won’t fix with each other.
@dan.may, could you check the documentation of your receiver for the minimum required set of RTCM messages? Does your receiver support RTCM3?
If you once had a connection between Reach and Javad, I think that some settings accidentally have been changed. I would recommend you to reset each device and try to set them from the scratch.
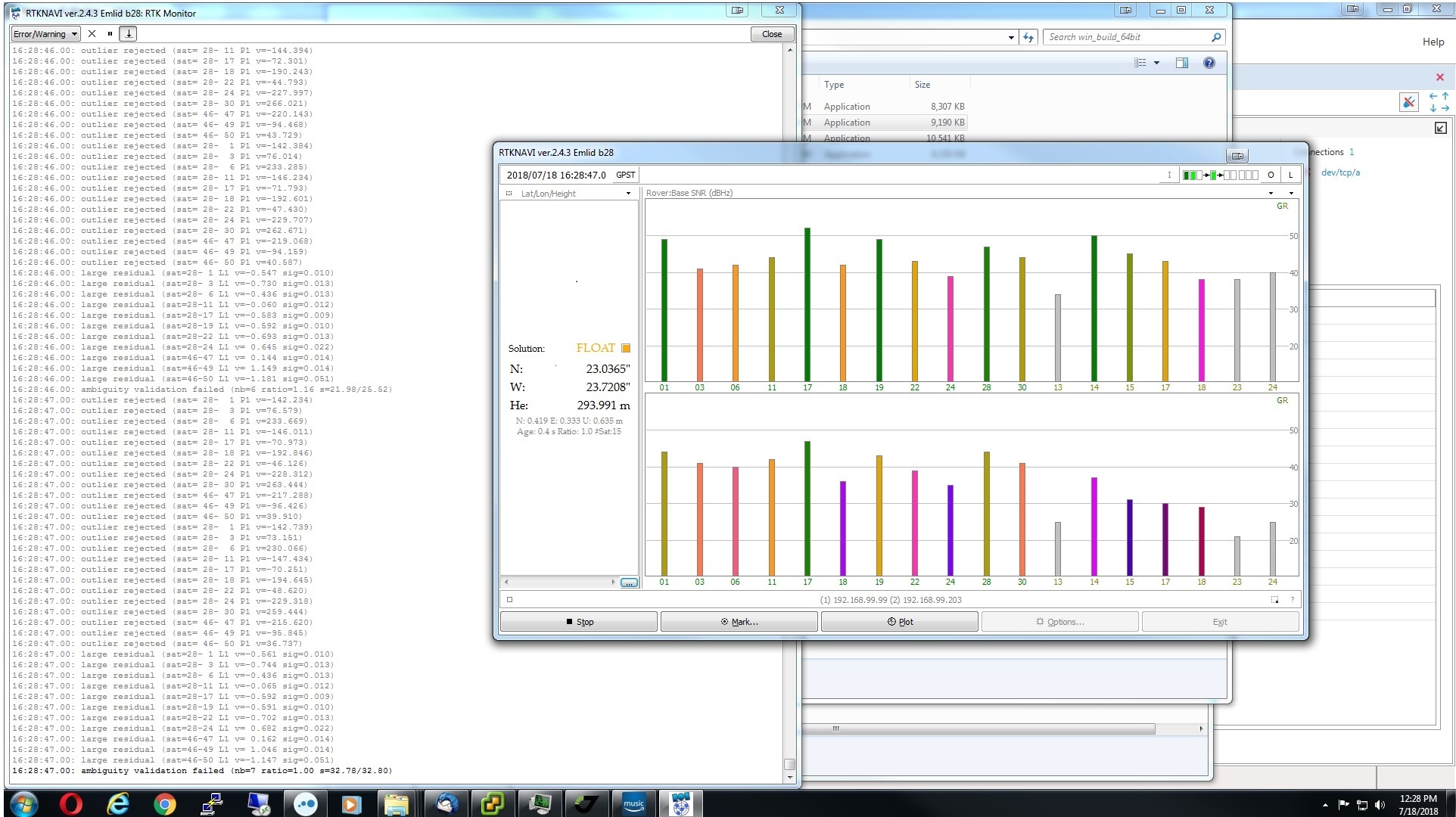
If I set the min ratio to fix AR to 1.0 it will fix but the elevation looks wrong. At the default 3.0 it won’t fix. Attached is a screenshot with error messages
Okay, it fixed. The Javad was using the public CORS network in my area and already had a fix. Once I disconnected from the public correction network RTKLIB shows a fixed position.
As per other threads I have now tried using a Reach RS as a base with a Topcon AGI-4, a Leica GR50 and a ComNav T300 all setup as rovers (or at least to receive RTCM3.x corrections) and none of them can get an RTK fix (or even float) with a Reach RS at the base.
The reverse works fine, with Reach RS acting as a rover with an L1/L2 base albeit the time to get a fix is slow(er) and less stable than with another Reach at the base
This was tested using 2.11.0 not sure if the 2.14.0 update has changed anything…
I got frustrated and took a break from this. I tried everything and I remember that there was an AR setting in RTKLIB that I would set to 1000 or so and I could get the Emlid to fix but the elevation was off about 100 feet between the two receivers.
Could it be that the receivers are using two different geoid models?