I am having an issue with my Emlid Reach Units. They are both setup to communicate via LoRa and both settings are exactly as the setup instructions show…
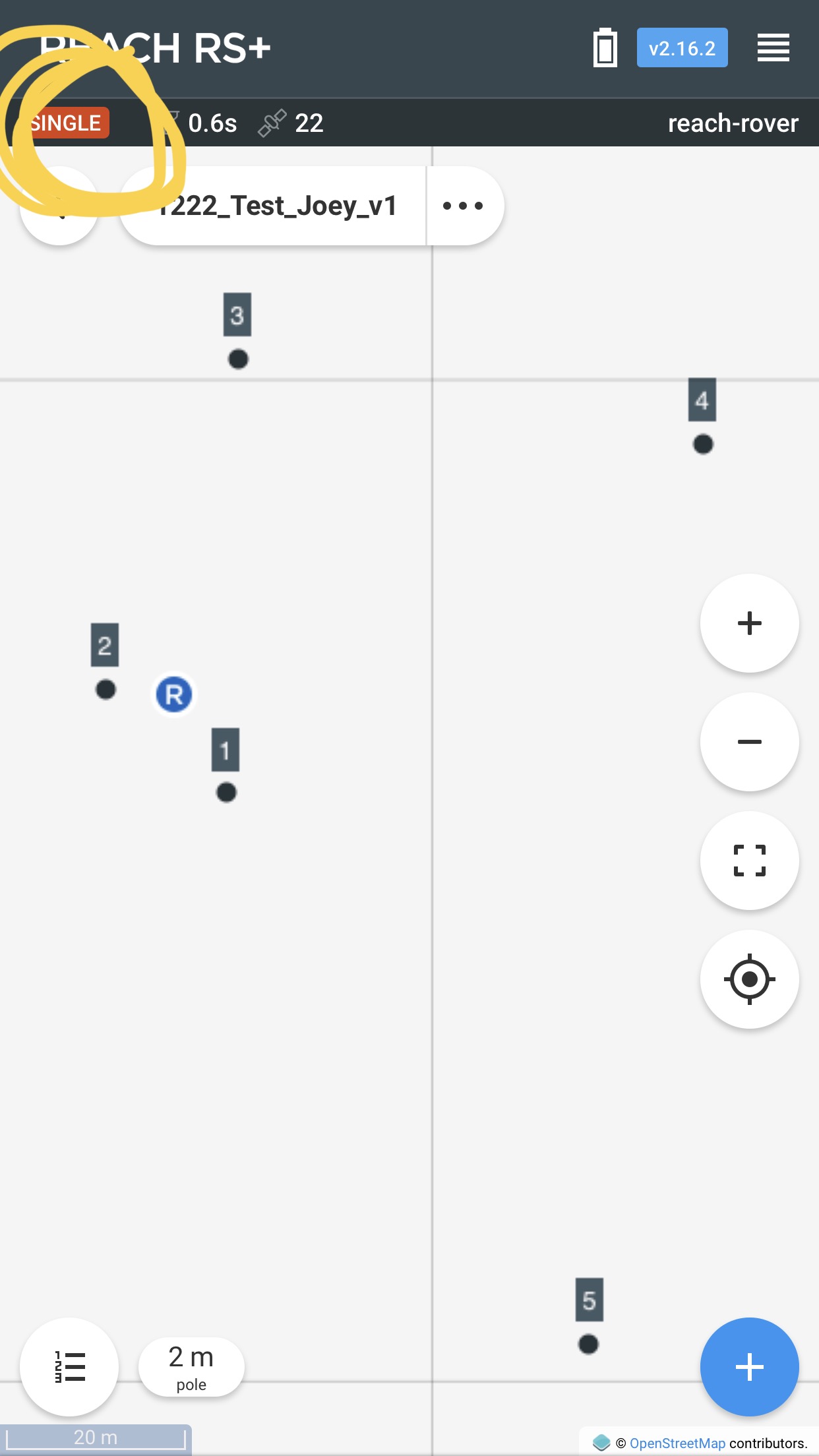
Both units are communicating via LoRa but it stays in “single” mode when I go into survey mode. I had everything working perfectly yesterday and for some reason they are not making a link when I try today. I am supposed to survey a property tomorrow so I need to figure this out ASAP.
What I should do about troubleshooting or fixing this issue. Been trying to figure this out for hours now and need some help resolving. Thanks in advance!!
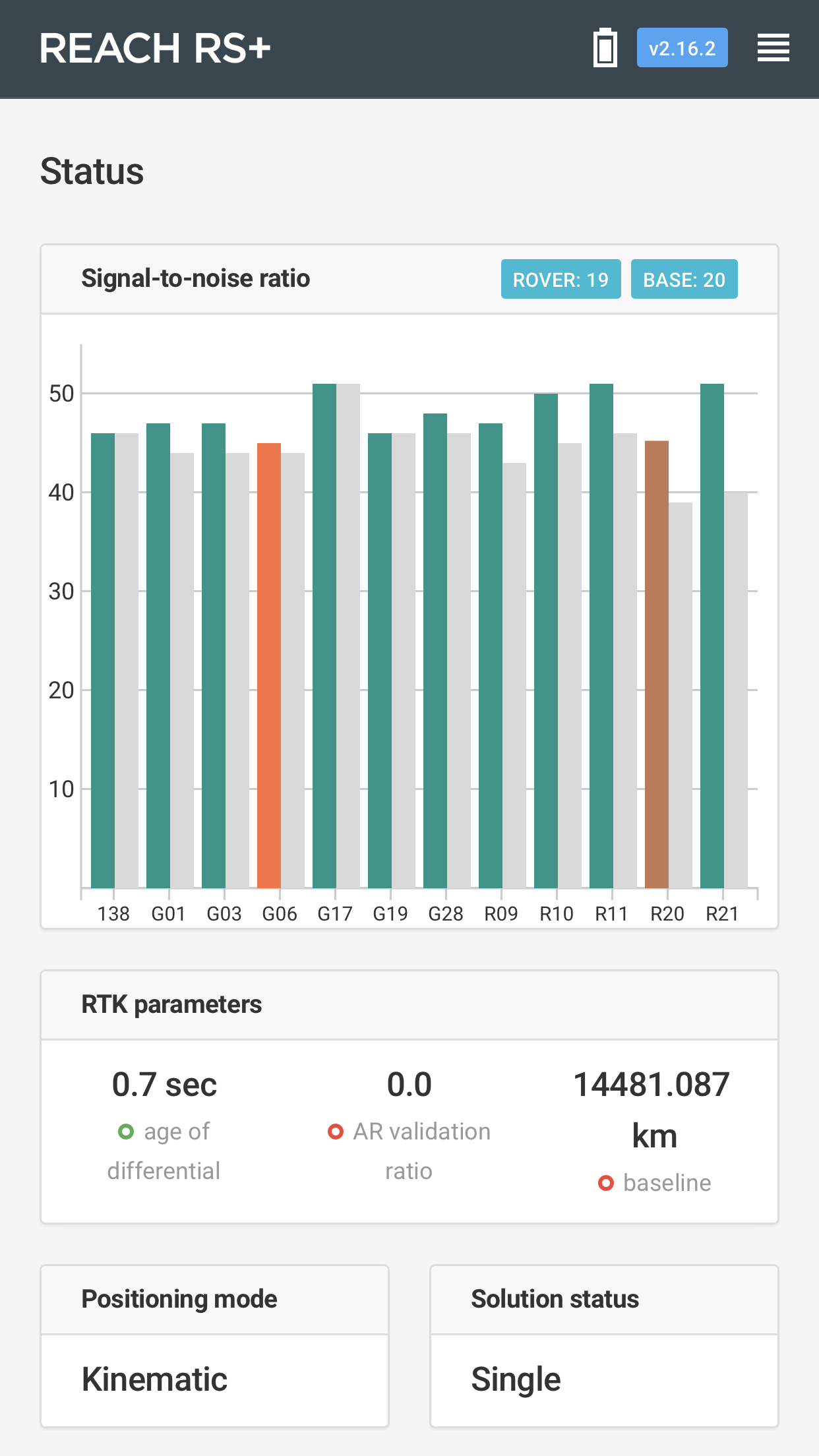
Can you post a simple system report and your correction input settings for the LoRa? That baseline lends itself to something erroneous, no way its from LoRa connection. @bide got over 19km and that’s a legend around these parts.
Do you have any other correction input on besides from the LoRa? If receiving NTRIP correction too, turn that off.
Well for one thing, you’ll be waiting an eternity for a fixed solution with that kind of baseline (14481km). Switch your base to calculate an ‘average single’ base coordinate. Set ARP station coordinate message to 0.1Hz and make sure it is enabled.
@tanna.j If you look at your base’s simple system report under base coordinates. Check that the coordinate listed there is what you want. It looks to be in XYZ format and not in the right place.
Also think height in base mode is wrong. 889.68m in ECEF is barely ofset to earths core. (your base is literally placed in earths core )
Double check your coordinates are in proper format.
We just chatted and I am thinking sort of the same thing. I had issues in the beginning entering a manual point that I got off of Google Earth and what the base was collecting was not close enough… I guess.
Height should be fine. I think because Base Mode coordinates were in XYZ the LLH points that were imported were throwing you way off in space. I don’t believe Reachview has any type of coordinate projection translation.