



LoRa testing today. Last time there were some significant obstructions and range was limited to 1.25km. Today was all about clear line-of-sight. The base was placed high up on a mountain. The rover went to two smaller mountains.
The base station: Base set super low to the ground on mountain top to avoid detection by passersby and to try to avoid theft. It didn't rain the whole day, but for a few hours it was raining pretty good. RS units are definitely waterproof.



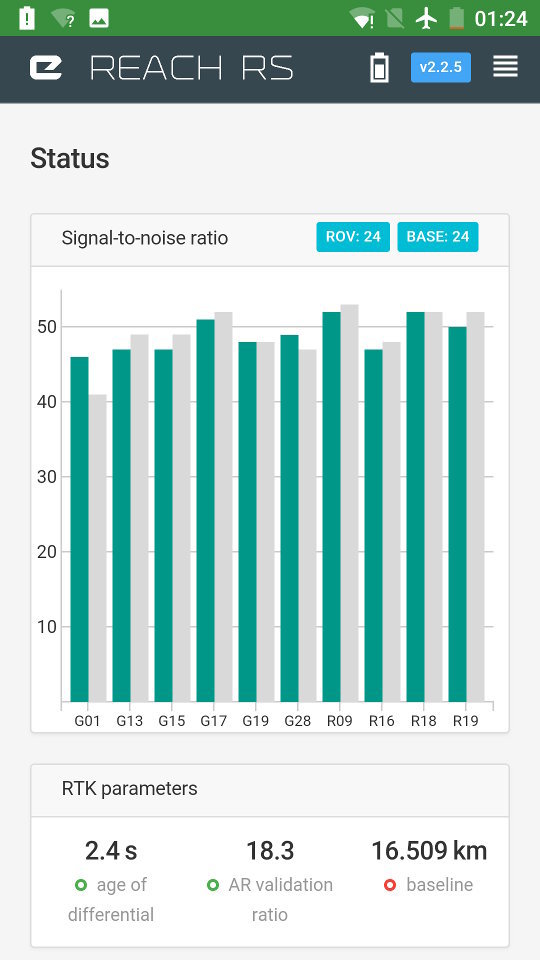
Now we head off and bring the rover to mountain 1: Rover hand-centered over "brass bolt" embedded in concrete pier. Rocks used to stabilize the RS against the wind. 16.5km baseline! Impressive! Way to go LoRa!


OK, off to mountain 2 now:

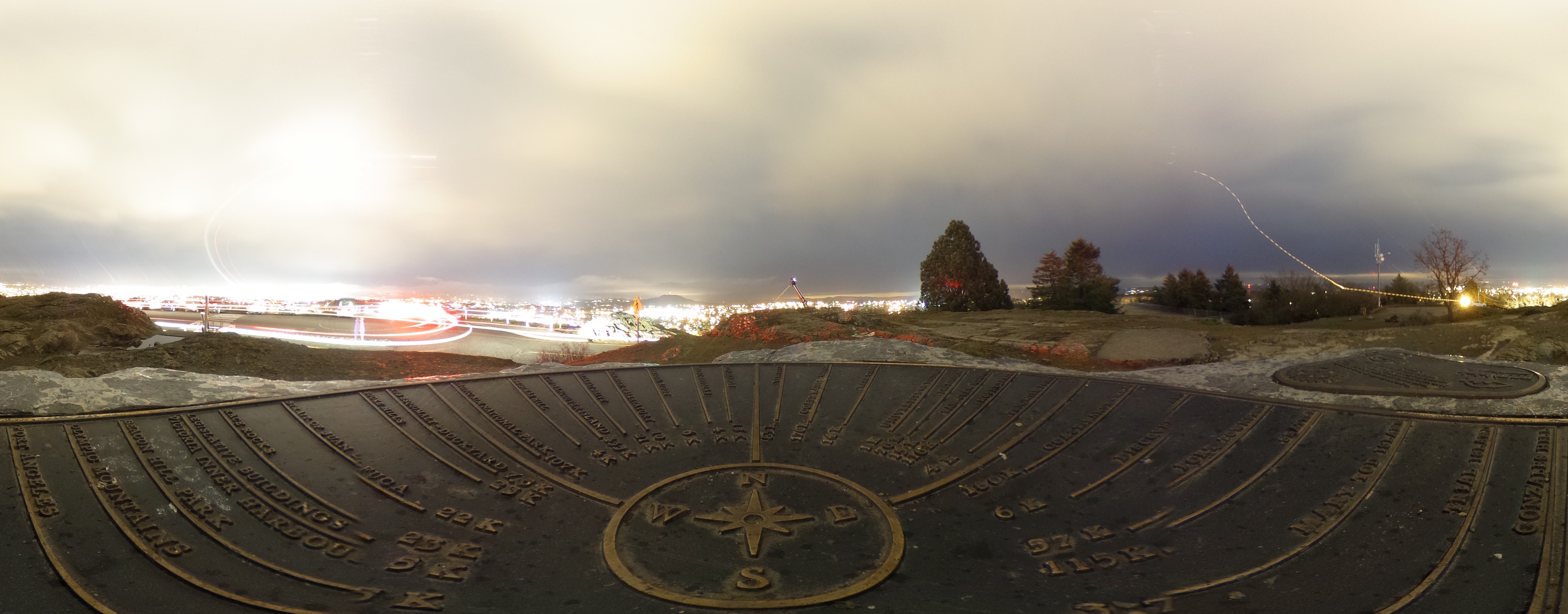
RS rover can be seen on tripod in the background. Center of picture, a little east of north.
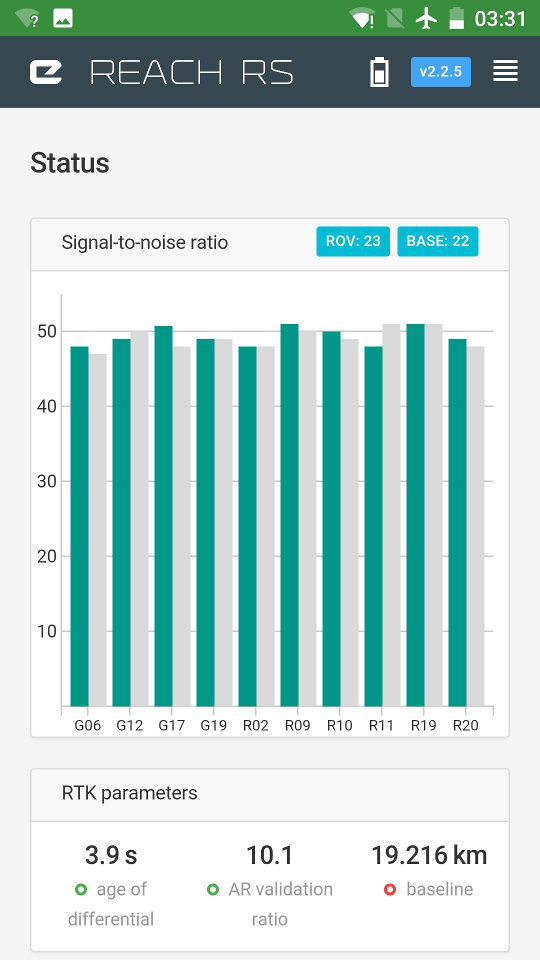
Now we’re talking! 19.2km baseline! That was beyond my expectations! 
My settings for today were (click to see the whole picture): **BASE**
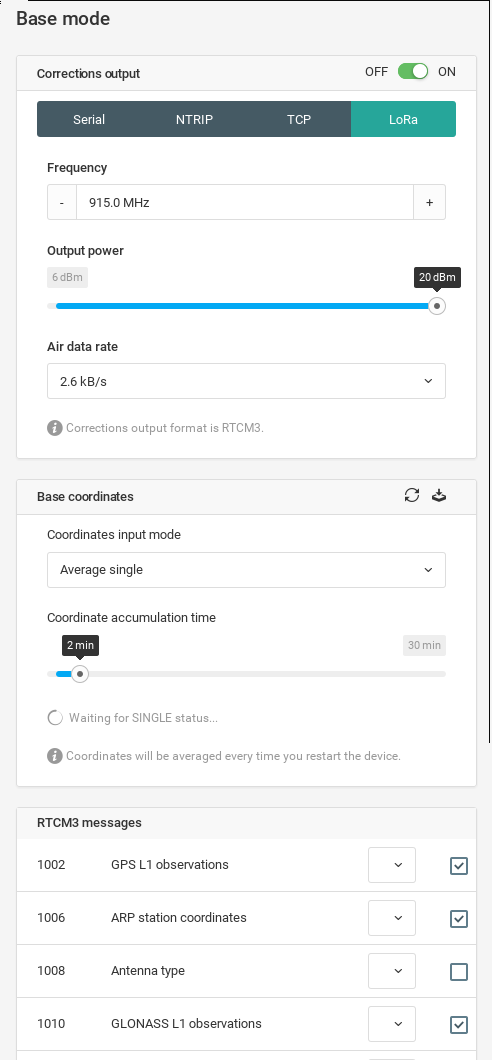
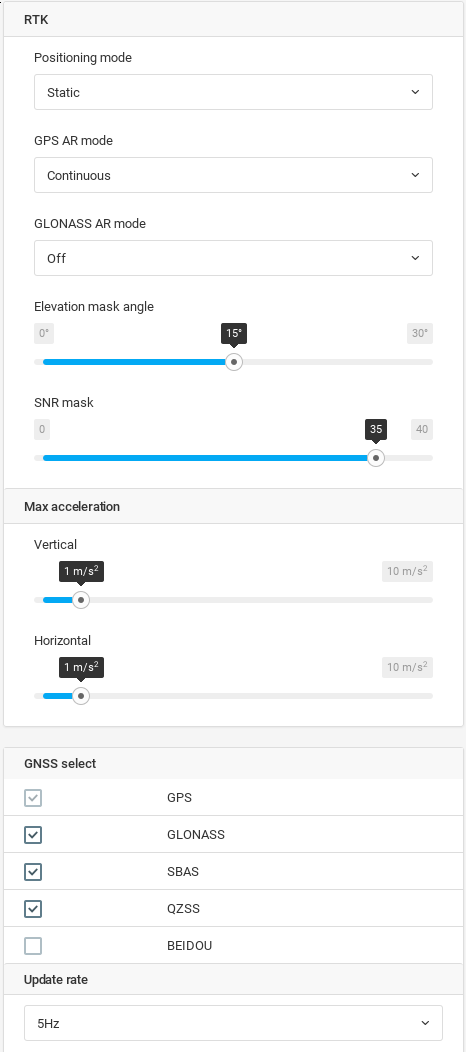
ROVER
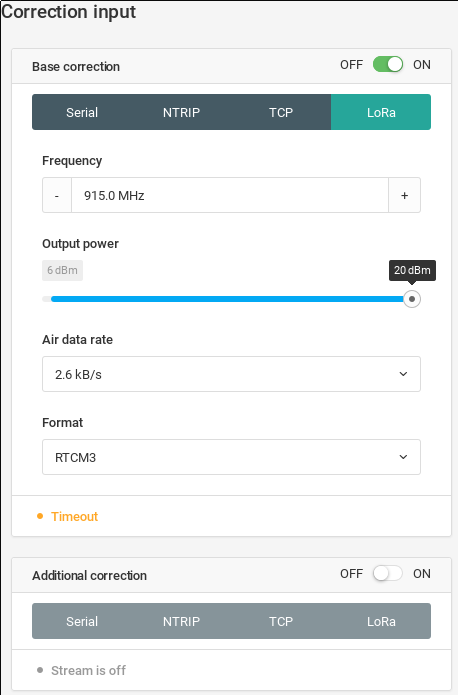
Not shown in the picture above are the message frequencies:
- 1002 (GPS) 0.5Hz
- 1006 (stn coord) 0.1Hz
- 1010 (GLO) 0.5Hz
In conclusion: a great day; the LoRa radios performed extremely well. :thumbsup::+1: