



New Reach user with RS+ receivers. Have yet to get a fix to date after two weeks of trying. I’m not new to GPS as I use traditional GPS survey gear from topcon and Trimble. How can I possibly not have a fixed solution with this array?

On v2.15.1 with GPS, GLONASS and GALILEO enabled.
Whats settings was used on base and rover? I system report from both would be nice
Simple or full report?
Base:
Simple system report
app version: 2.15.1-dev-r0
'wifi_status, interface: wlan0':
- wifi_mode: ap
- access_point:
band: bg
channel: 1
password: null
ip: 192.168.42.1
is_added: true
is_connected: true
mac_address: CC:B8:A8:F5:2D:E0
security: wpa-psk
ssid: DRONE_BASE_ML:D0:92
uuid: d4c6681c-1ad7-42eb-9b67-e9881c5887e5
base mode:
base coordinates:
accumulation: '3'
antenna offset:
east: '0'
north: '0'
up: '2.082'
coordinates:
- '30.633785997'
- '-97.849386377'
- '253.81'
format: llh
mode: single-and-hold
output:
enabled: true
format: rtcm3
path: lora
type: lora
rtcm3 messages:
'1002':
enabled: true
frequency: '1'
'1006':
enabled: true
frequency: '0.1'
'1008':
enabled: false
frequency: '1'
'1010':
enabled: true
frequency: '0.5'
'1019':
enabled: false
frequency: '1'
'1020':
enabled: false
frequency: '1'
'1097':
enabled: true
frequency: '0.5'
'1107':
enabled: false
frequency: '1'
'1117':
enabled: false
frequency: '1'
'1127':
enabled: false
frequency: '1'
gps:
enabled: false
frequency: '1'
qzss:
enabled: false
frequency: '1'
bluetooth:
discoverable: false
enabled: false
pin: '***'
correction input:
input2:
enabled: false
format: rtcm3
path: ttyMFD2:38400:8:n:1:off
send position to base: 'off'
type: serial
input3:
enabled: false
format: rtcm3
path: :9028
type: tcpsvr
logging:
base:
format: RTCM3
started: true
version: null
correction:
format: RTCM3
started: true
version: null
interval: 24
overwrite: true
raw:
format: RINEX
started: false
version: '3.03'
solution:
format: LLH
started: true
version: null
lora:
air rate: '9.11'
frequency: 869500
output power: '20'
position output:
output1:
enabled: false
format: nmea
path: bluetooth
type: bluetooth
output2:
enabled: false
format: llh
path: :9001
type: tcpsvr
output3:
enabled: true
format: llh
path: :2014
type: tcpsvr
output4:
enabled: true
format: llh
path: :2015
type: tcpsvr
rtk settings:
elevation mask angle: '10'
glonass ar mode: 'on'
gps ar mode: fix-and-hold
max horizontal acceleration: '4'
max vertical acceleration: '4'
positioning mode: kinematic
positioning systems:
compass: false
galileo: true
glonass: true
gps: true
qzs: true
qzss: false
sbas: true
snr mask: '30'
update rate: '1'
1 Like
Rover:
Simple system report
app version: 2.15.1-dev-r0
'wifi_status, interface: wlan0':
- wifi_mode: ap
- access_point:
band: bg
channel: 1
password: null
ip: 192.168.42.1
is_added: true
is_connected: true
mac_address: 44:2C:05:FE:76:E7
security: wpa-psk
ssid: DRONE_ROVER_ML:C6:8E
uuid: ecb440c4-6d2e-4b34-b0e7-73f64d12c38a
base mode:
base coordinates:
accumulation: '2'
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- '0'
- '0'
- '0'
format: llh
mode: single-and-hold
output:
enabled: false
format: rtcm3
path: tcpsvr://:9000#rtcm3
type: tcpsvr
rtcm3 messages:
'1002':
enabled: true
frequency: '1'
'1006':
enabled: true
frequency: '0.1'
'1008':
enabled: false
frequency: '1'
'1010':
enabled: true
frequency: '0.5'
'1019':
enabled: false
frequency: '1'
'1020':
enabled: false
frequency: '1'
'1097':
enabled: true
frequency: '0.5'
'1107':
enabled: true
frequency: '1'
'1117':
enabled: false
frequency: '1'
'1127':
enabled: false
frequency: '1'
gps:
enabled: false
frequency: '1'
qzss:
enabled: false
frequency: '1'
bluetooth:
discoverable: true
enabled: true
pin: '***'
correction input:
input2:
enabled: true
format: rtcm3
path: lora
send position to base: 'off'
type: lora
input3:
enabled: false
format: rtcm3
path: :9028
type: tcpsvr
logging:
base:
format: RTCM3
started: false
version: null
correction:
format: RTCM3
started: true
version: null
interval: 24
overwrite: true
raw:
format: RINEX
started: false
version: '3.03'
solution:
format: LLH
started: false
version: null
lora:
air rate: '9.11'
frequency: 869500
output power: '20'
position output:
output1:
enabled: false
format: nmea
path: bluetooth
type: bluetooth
output2:
enabled: false
format: llh
path: :9001
type: tcpsvr
output3:
enabled: true
format: llh
path: :2014
type: tcpsvr
output4:
enabled: true
format: llh
path: :2015
type: tcpsvr
rtk settings:
elevation mask angle: '10'
glonass ar mode: 'on'
gps ar mode: fix-and-hold
max horizontal acceleration: '4'
max vertical acceleration: '4'
positioning mode: kinematic
positioning systems:
compass: false
galileo: true
glonass: true
gps: true
qzs: true
qzss: false
sbas: true
snr mask: '30'
update rate: '5'
@Brent_W chimed in on another thread and after a couple of reboot of the rover, toggling which GPS systems were used and 20 minutes I now have a fix.
2 Likes
Thank you @tatiana.andreeva!
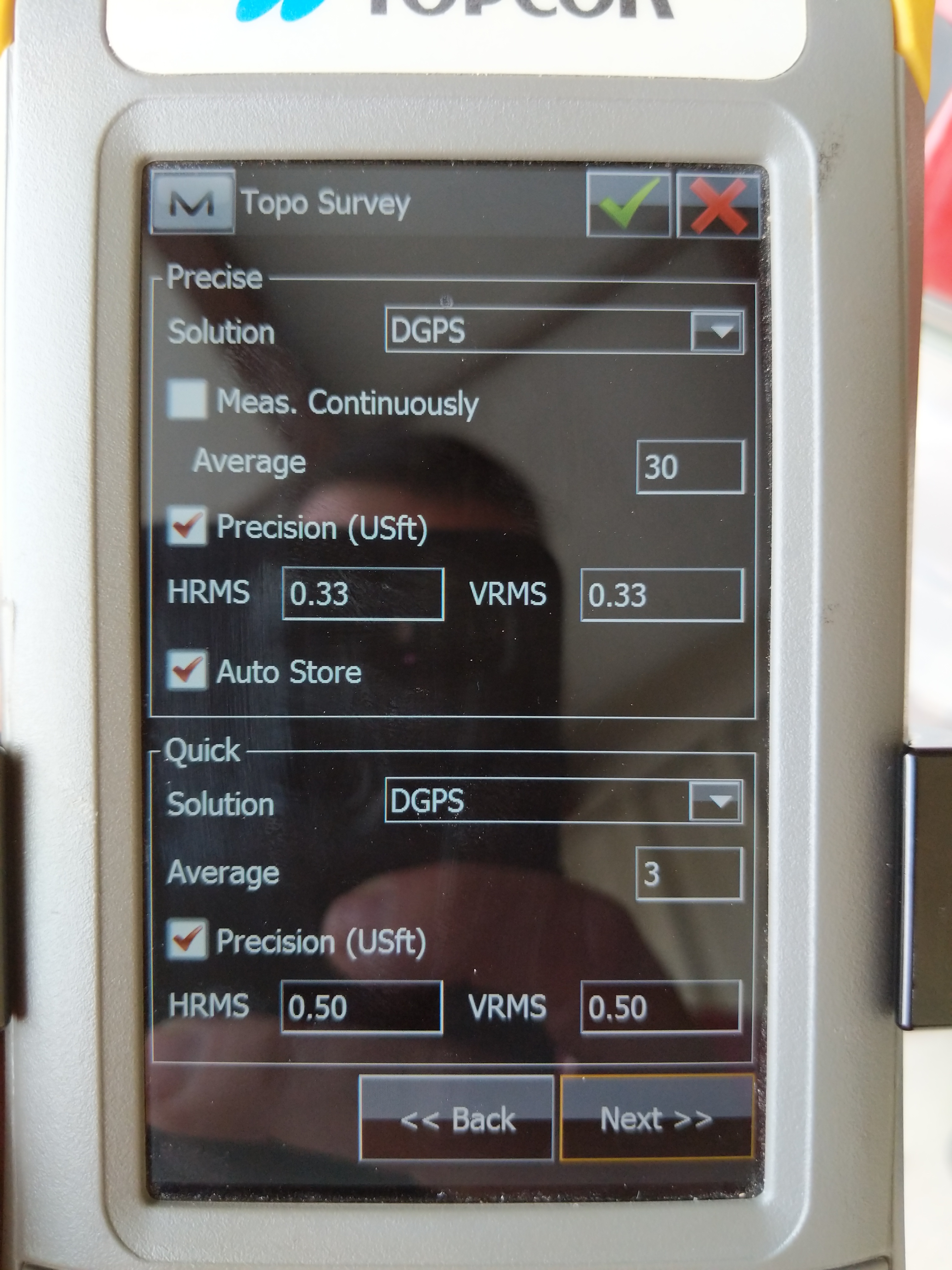
That is what I am use to and the step it would not let me do. I have tried to make sure all of my settings are correct in ReachView, but I am getting very inconsistent modes and normally not fixed very often. There are a couple of other threads on here that are working through that. I think I also need to check my RMS tolerances as they may be too low from using the Topcon receivers and not allowing the Reach rover to shoot.
(edit) Oh, and I am using the Reach RS+ on 2.15.1 if that makes any difference…
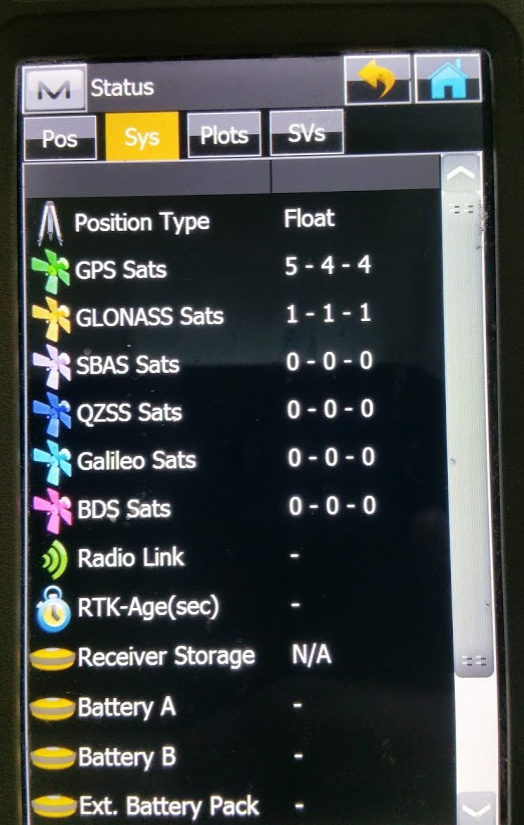
My future observations may be deemed more appropriate in another thread by some, but I am going to continue on in this thread because if I was trying to do what the topic is I would want all of this information. As of right now I have a ton of satellites and cannot get a fix. I’ve been sitting here for 15 minutes.

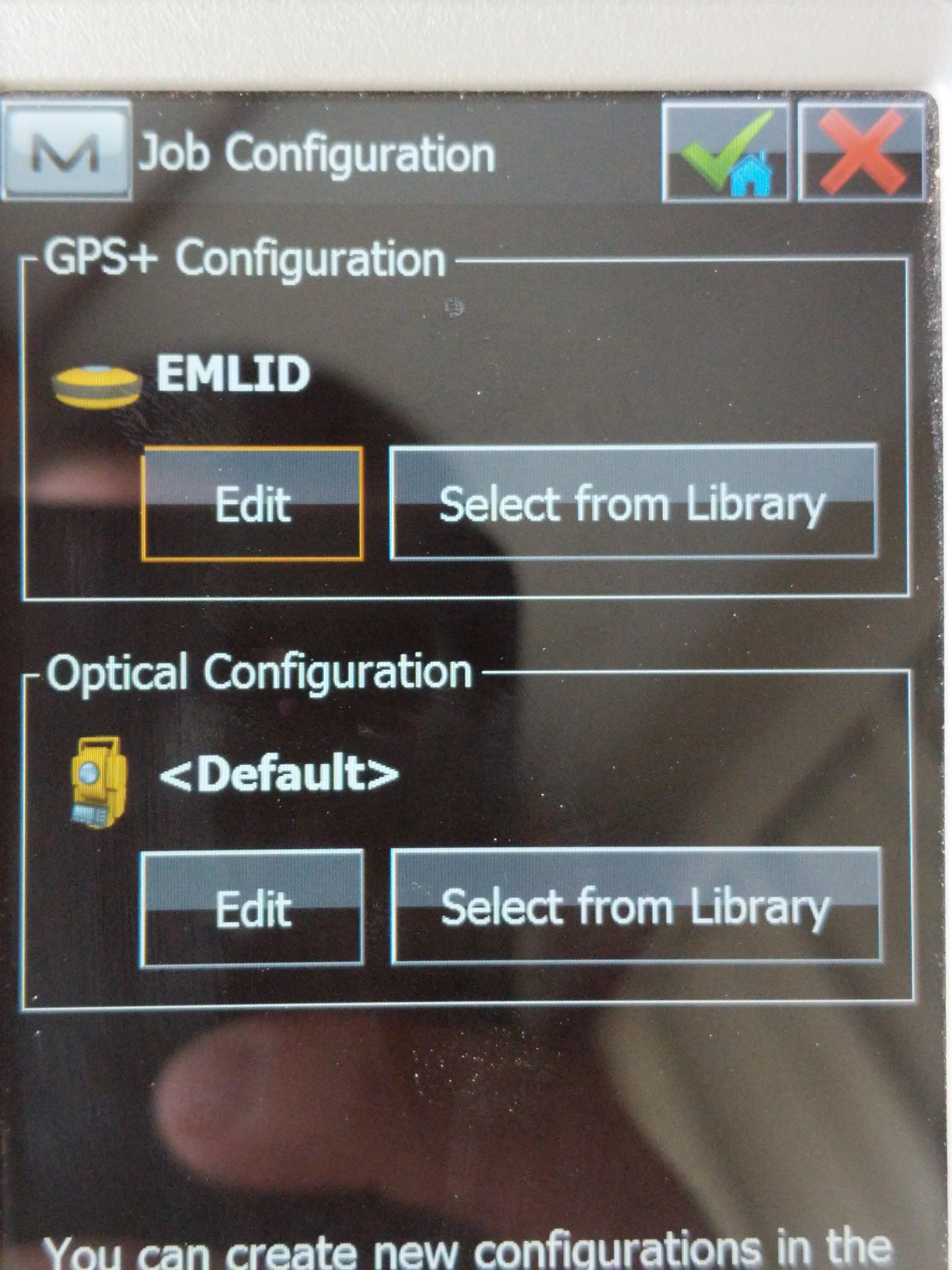
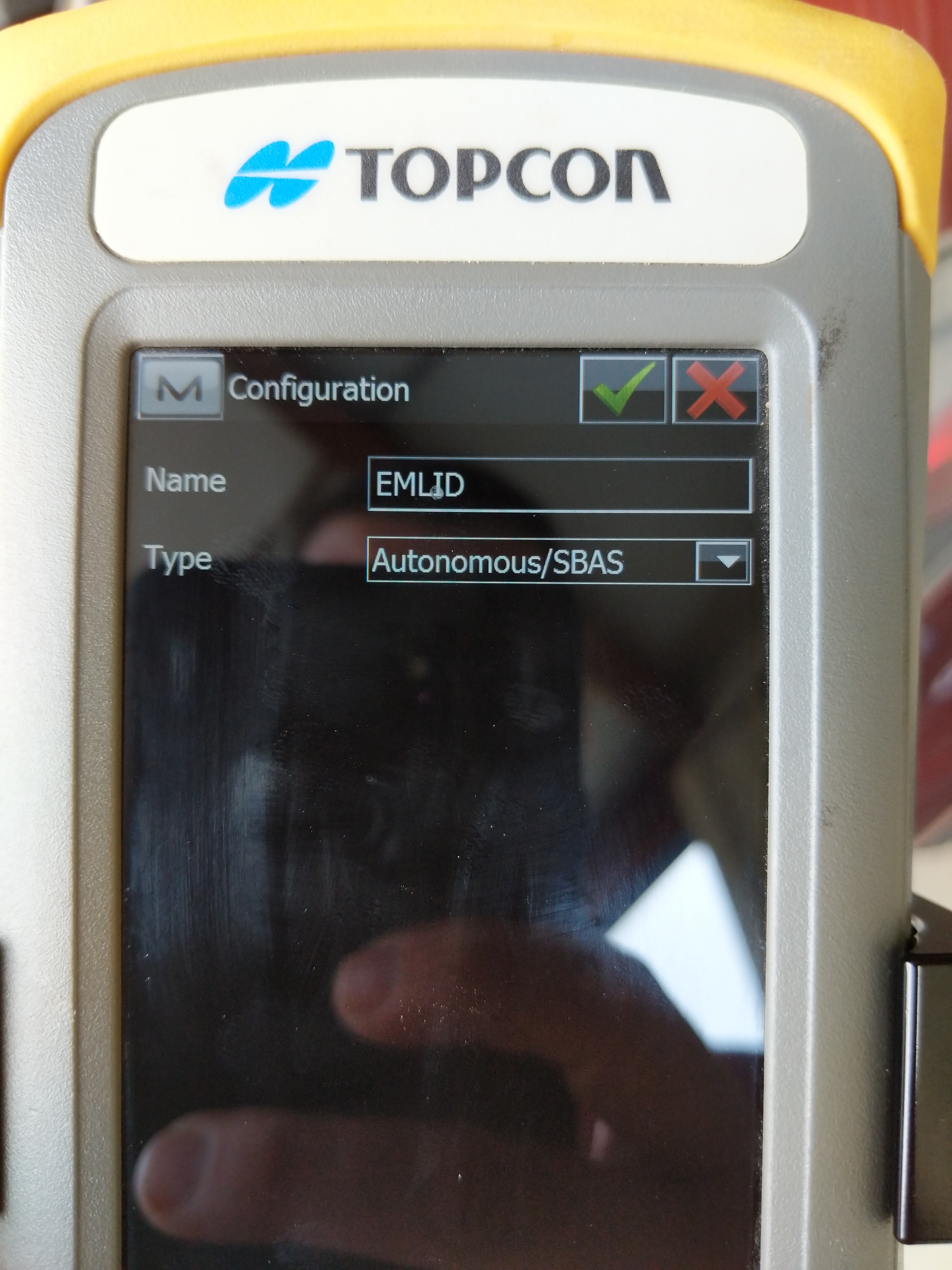
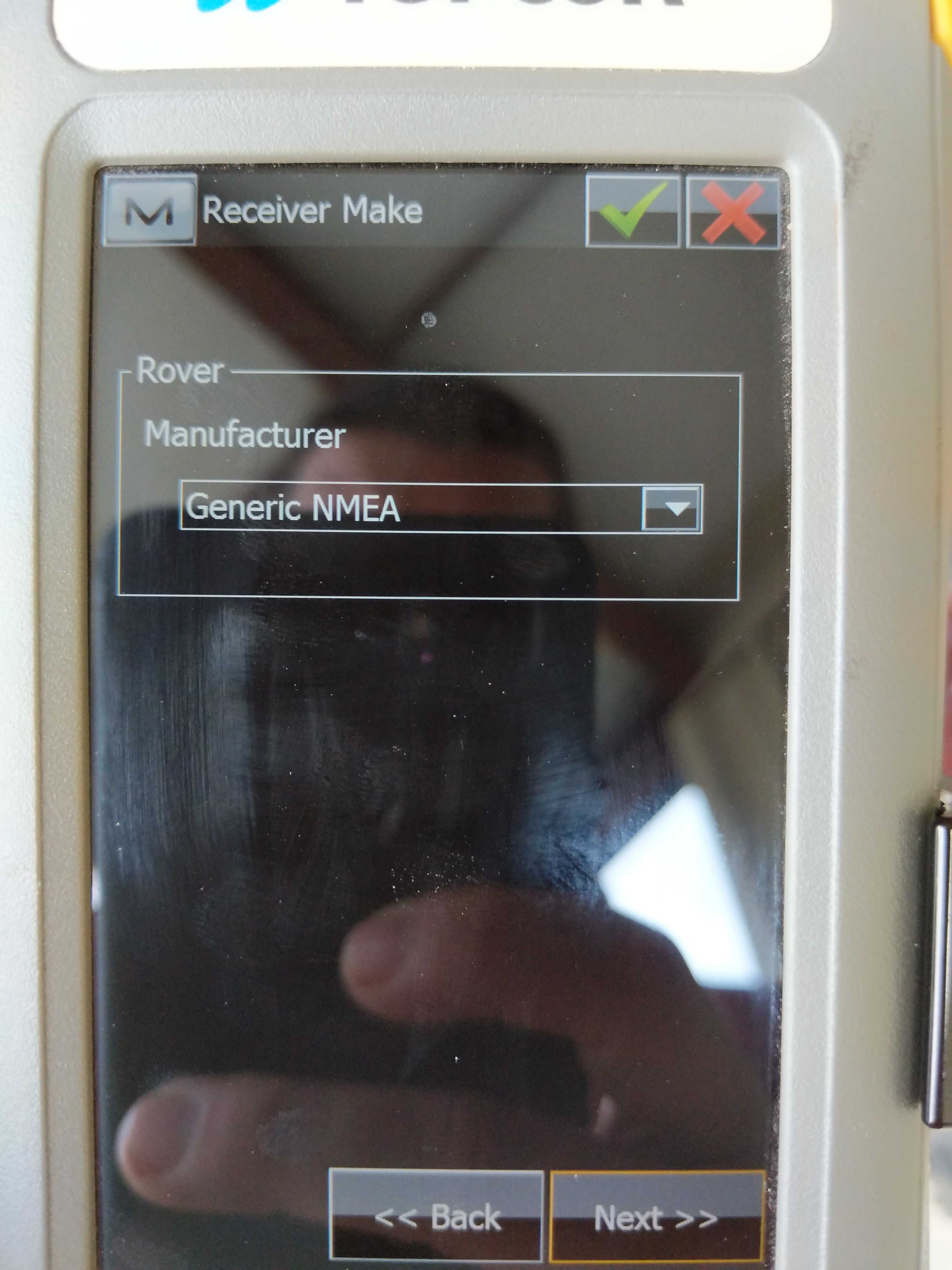
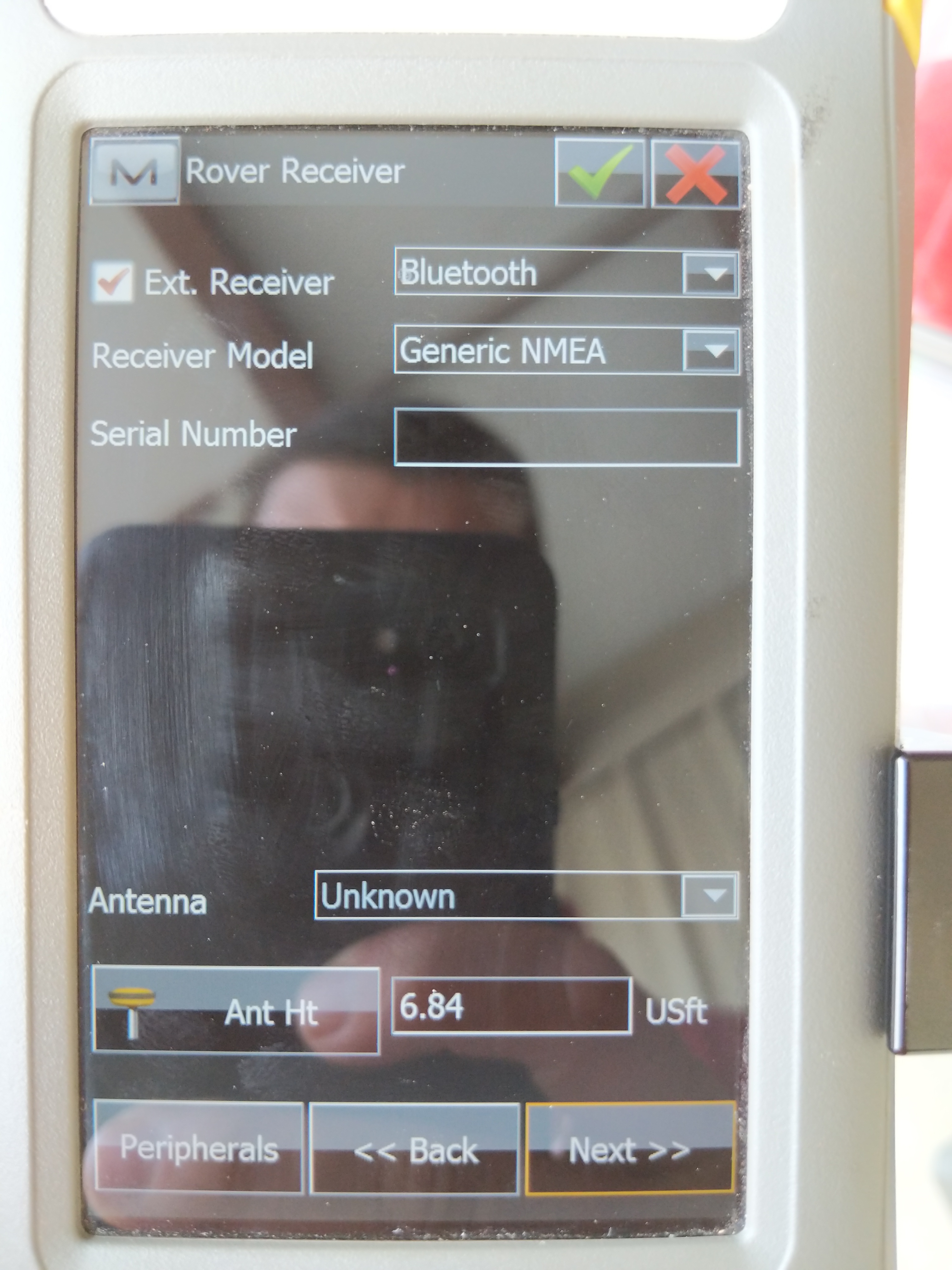
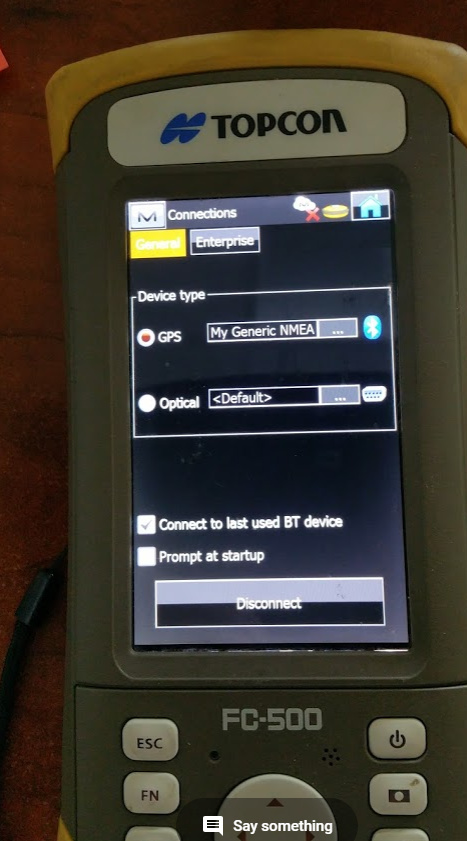
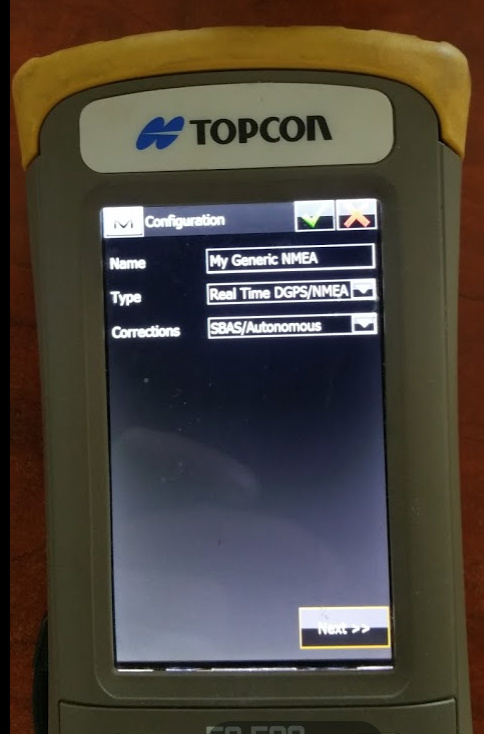
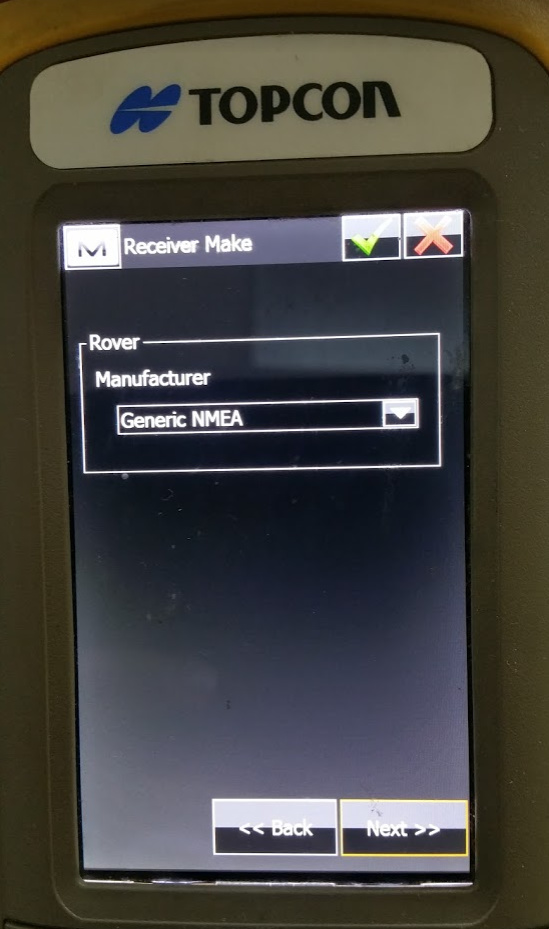
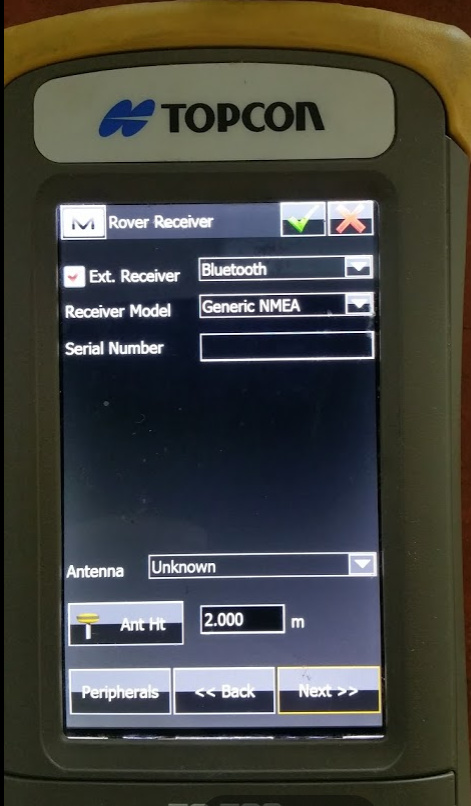
Next problem is that while I have the receiver successfully connected to the Topcon FC-500 in Bluetooth I cannot get it to finalize the connection in Magnet. I had it connected before so I am working through it. when I initiate the connection with the connect button it asked me if I want to connect to Rover. I said yes and it continued on. Eventually it gave me a screen to choose which of the receivers I wanted to connect to. Then it continues to spin with the orange Sync icon.
The float vs fix problem is obviously (as you know) unrelated to Topcon Magnet but it sure is a pain when it happens. I don’t want to steer the thread in the wrong direction here so I’d suggest you try following the forum discussions on topics like “trouble getting a fix.” I’d start off by turning off all satellite systems except gps. Thanks for posting all the Topcon pictures. Let’s get this figured out!
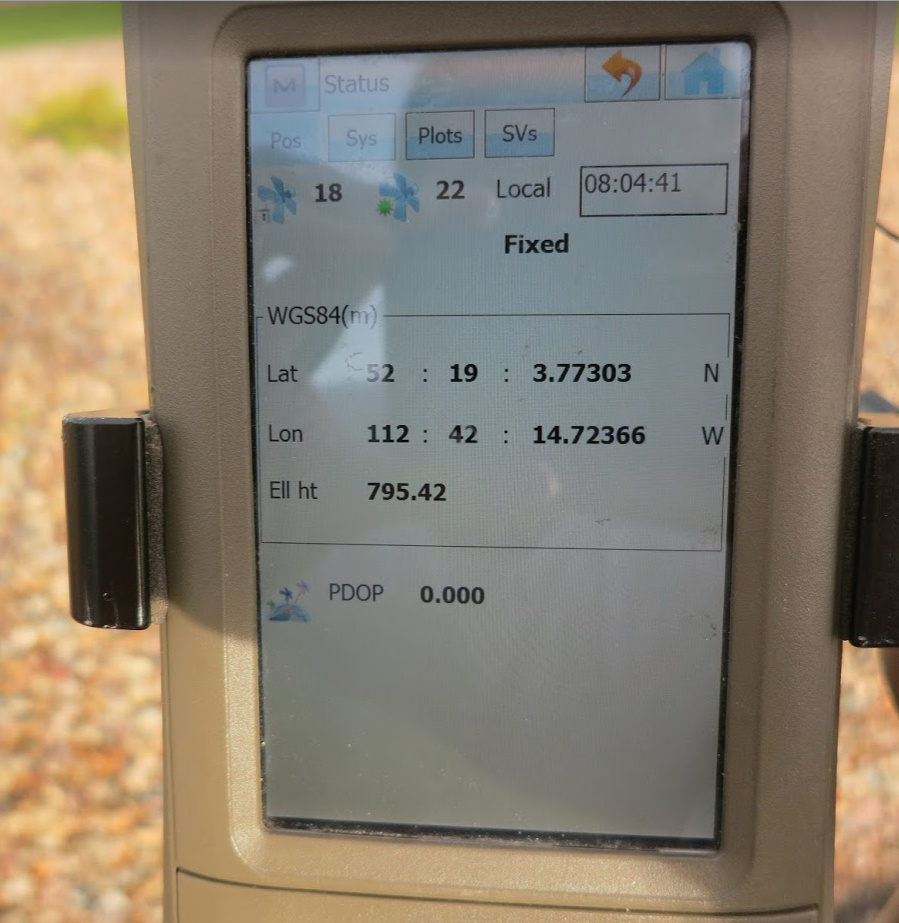
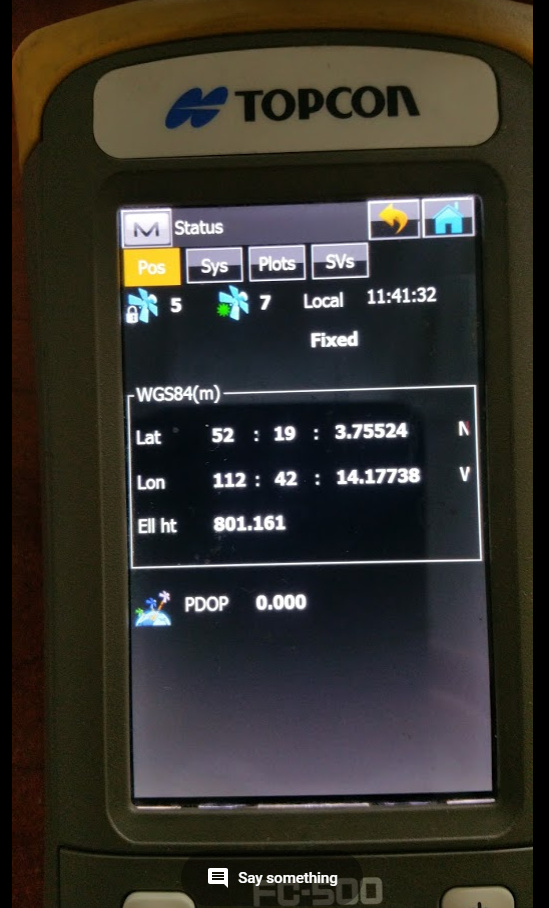
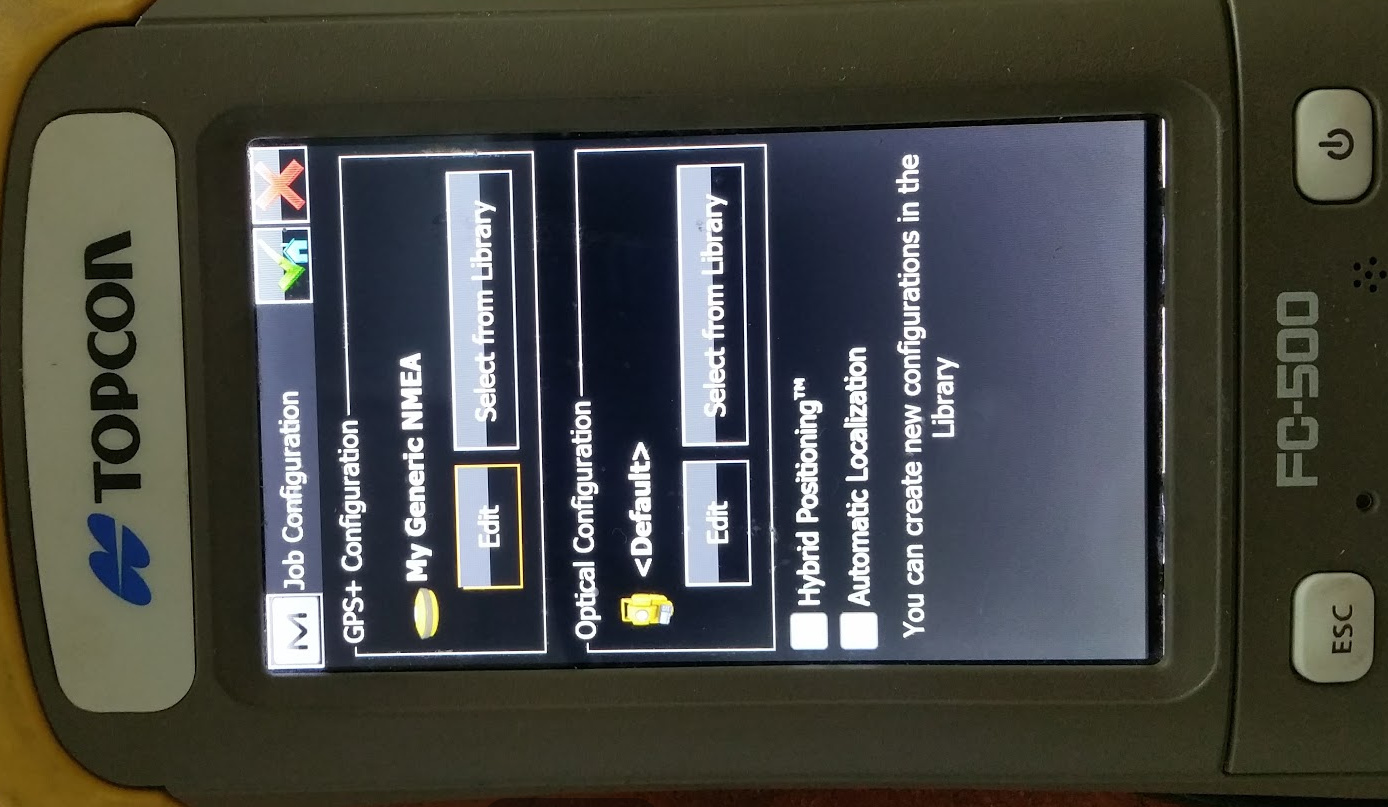
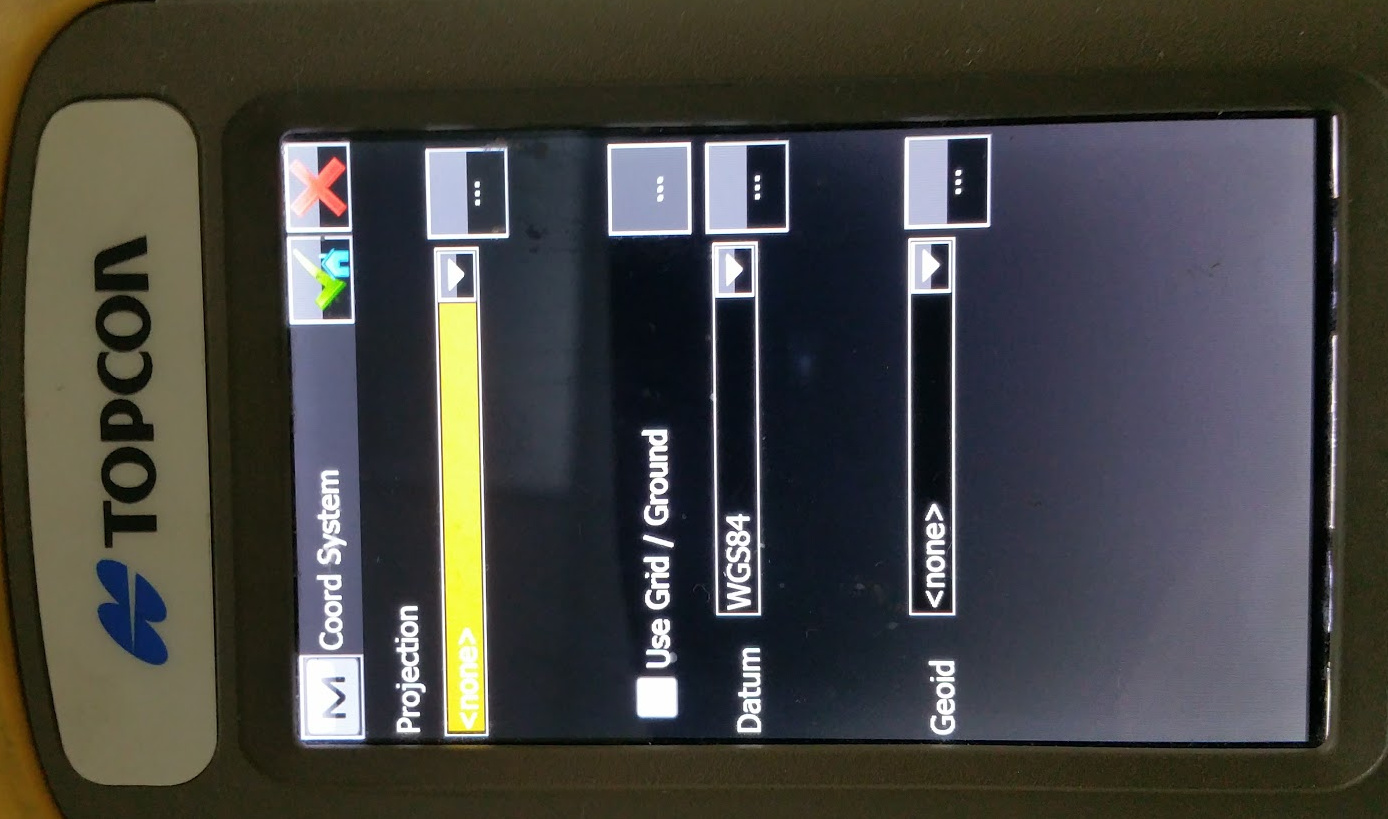
Some pictures as proof that it can work! Some are irrelevant to the problem but they’re all topcon.
I also need help with the localization process.
Magnet Field Layout
Magnet Field



3 Likes
Thanks Brent! I had already turned off everything except GPS and it still floated for the 15 minutes I let it stay. I restarted the rover and turned GLONASS and Galileo back on and after another 20 minutes I have a fix! It’s jumping around a lot, but seems to be maintaining. I guess it’s like the typical electronics troubleshooting. When in doubt reboot and toggle.
2 Likes
Now I’m trying to get past the orange sync’ing icon. When I try to get out of it or change receivers and then get the little gray spinning dots and have to completely re-set the data collector.
Is it possibly waiting for some kind of approval back in the system connections in FC-500 settings? I found the FC-500 rather finicky for the bluetooth connection but once I had it, I didn’t have trouble with it dropping out. I haven’t tried it again for a long time because I actually forgot how to set up the com ports and everything for bluetooth. I should try again, though.