This is calibration issue.
You need to install spring to your Taranis controller left stick and re-calibrate both radio and ESCs
Likely the radio did not properly calibrate due to incorrect throttle center position.
Generally for drones you need to have spring on the left stick to keep it centered. This needs to be fixed.
Install a spring? I am a beginner. I dont know what a spring is in the context of this conversation
Did the box with the Taranis have a small metal spring (similar size to spring inside ball pen)?
It comes together with a small plastic lever.
Both these parts are installed into the left stick to keep it positioned in the middle.
Its a very easy job, I done it with no issues on my Radio TX.
I configured the radio setup via qgroundcontrol. I followed the instructions pretty well
btw I should mention that the esc uses an oneshot protocol and I dont know if that plays a factor in this. I am also running ardupilot 3.5.5. Here is a video of me configuring it:
And then I configured the ESCs afterward and the problem persisted
The instructions are based on assumption that left controller stick is in drone mode (with spring installed).
I have seen videos of people configueing it without a spring. And what is drone mode?
here is a video from qgroundcontrol:
from
Redirecting to latest version of document (master).
There is no spring in the video
Actually I have same sensitivity behavior as in your first video after some flights after initial calibrarion.
Does it affect your flying? Drone should keep altitude at 50% throttle, so low throttle sensitivity can matter less, mid throttle should be responsive.
I will record some video and experiment with calibration tomorrow.
yeah it immediately shoots up into the air. I mean it doesn’t even hover. It either flies up directly or falls down. No in between. I tried messing with the trims to see if that did anything, but it didn’t.
Which mode you use when arming? Stabilize?
How do you arm? Throttle down-right for 5 seconds, then throttle down-center and slowly increasing?
I think this is 100% radio or ESC calibration issue.
Let’s wait for answer from people analyzing bin log in other thread.
I did everything according to the manual. I reflashed the microSD but the problem persisted after I re-calibrated everything. Could it be caused by faulty ESCs?
Hi @Lucullus,
Could you please try connecting all ESCs to the 3rd channel of your receiver simultaneously and check whether they will spin evenly or not?
I will do that in a bit. However, I did use mission planner. When set to a specific throttle, all of the motors spun at the same rate. It seems to me that everything is too sensitive for the motors. Even at low throttle values, they spin pretty fast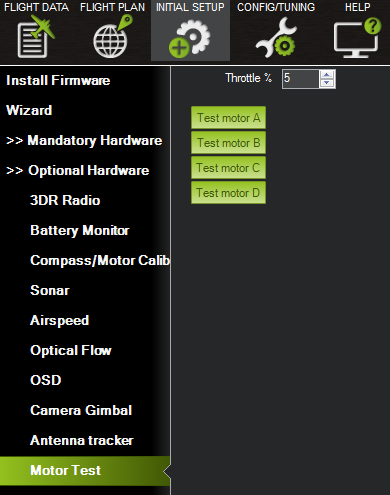
They tend to spin at the same rate. But there is often a delay between some of them (motors) when I send the command over (press the button).





