



Hello everyone! I am having a problem with my navio drone build. Every time, I try to fly it, it does an insta flip. I set up the motors according to this diagram:
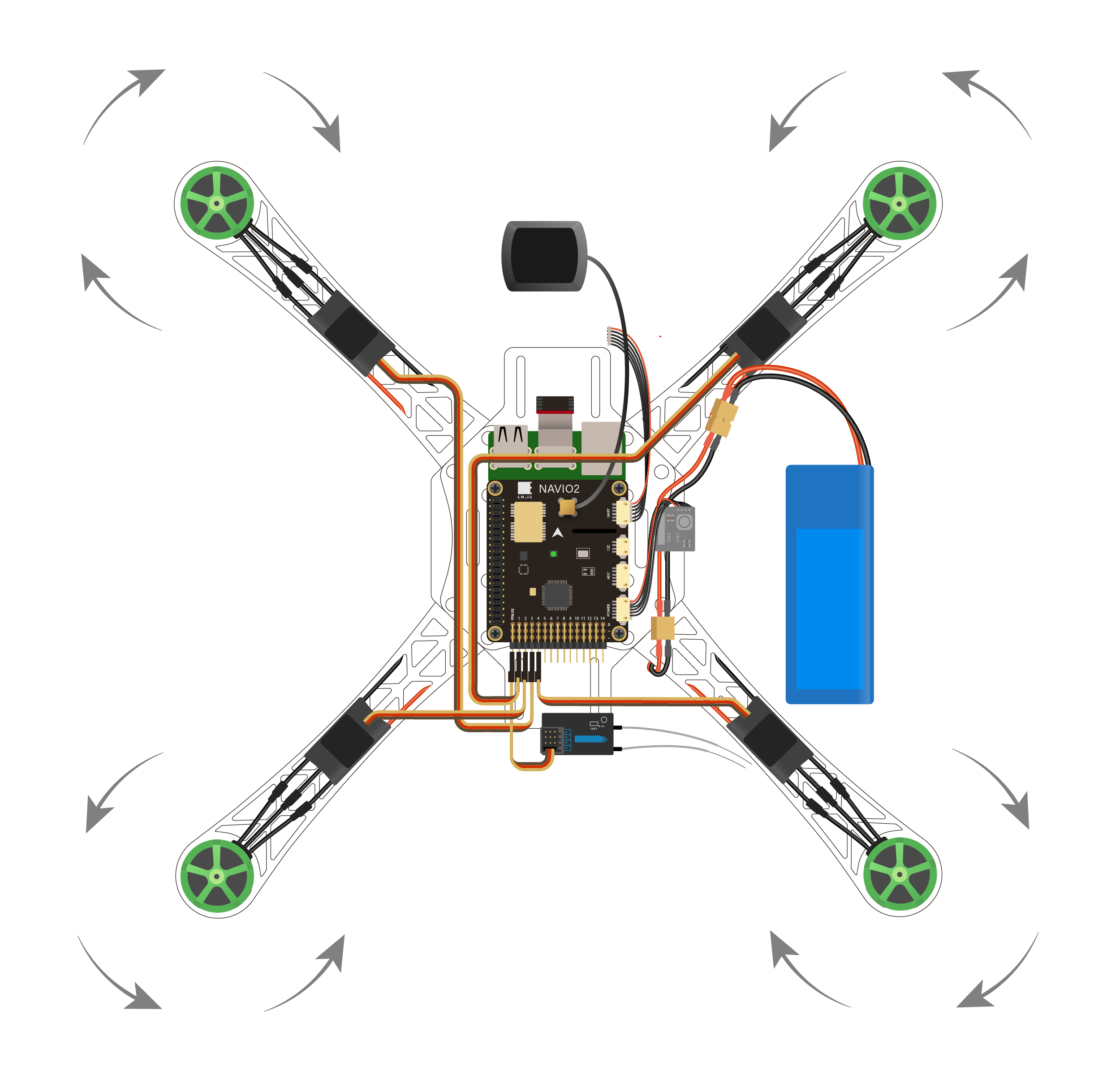
and my build looks like this:

Any ideas?
Hello everyone! I am having a problem with my navio drone build. Every time, I try to fly it, it does an insta flip. I set up the motors according to this diagram:
and my build looks like this:
Any ideas?
What design program is that? Thanks.
You are a funny guy!
Propellers 1 & 3 are out of place, you have to switch them.
Marc
Thanks. Is there a diagram for the rightful position of propellers that I can look at? In addition, I was running some motor tests using mission planner and I noticed that motor A (top right hand corner) spins much faster than the other three at the same throttle. Is this normal?
What do you mean? I made the second pic in photoshop while the first one is from the emlid navio documentation
It is the good way to do it.
Marc
Thank you for your help! Do you think that one motor spinning much faster than the other ones when at the same throttle will create problems?
I tested it using:
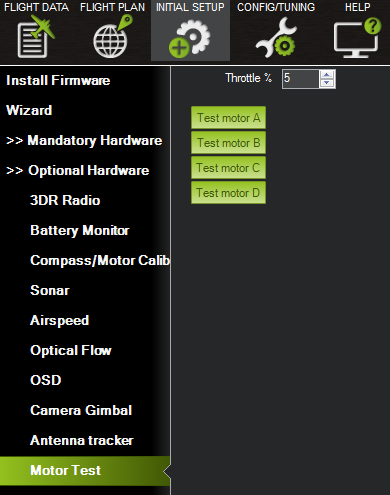
As mentioned before, motor A spins much faster than the other three when testing them out at the same throttle.
You need to calibrate ESCs.
Thanks. I re-calibrated the ESCs and now they turn at the same speed!
I am still having persistent insta-flipping despite calibrating my speed controllers and changing the propellers. Here is a picture (sorry I didnt rotate the image but the back is the left side and the first motor is the bottom right one and the motor order is clockwise).
BTW what is the front of the navio? I assumed that the front was where the raspberry pi has the ethernet and usb ports, but am I wrong?
Unfortunatelly in Mission Planner motor A B C D is not same as 1 2 3 4 in Ardupilot diagram.
I dont remember exactly what is the mapping, but it is definatelly confusing thing in Mission Planner.
I think this is your issue.
Well I got it flying and hovering, but it is super sensitive. Just moving the throttle slightly up from the lowest position causes the drone to fly all the way up. Is there any way to make it less sensitive?
First recalibrate radio and then again recalibrate ESCs. Only calibrate ESCs once radio is calibrated.
yeah I did. Now I notice that there is a delay for some of the motors when it comes to spinning using the mission planner tests
Like one motor will spin .25 seconds after I instruct to with mission planner while another motor will spin 1 second afterwards. I have re-calibrated the ESCs a couple of times now.
Could the way I soldered the wires result in the delay?
I dont think delay is an issue.
Thanks for your response but sensitivity is still an issue. Here is a video with sound:

