Before creating a new thread please refer to the documentation for Navio2 and Navio+.
In case you are creating a thread about an issue it is necessary to provide following information to get help:
Image and ArduPilot version.
Detailed problem description. How does observed behavior differ from the expected one?
Your step by step actions.
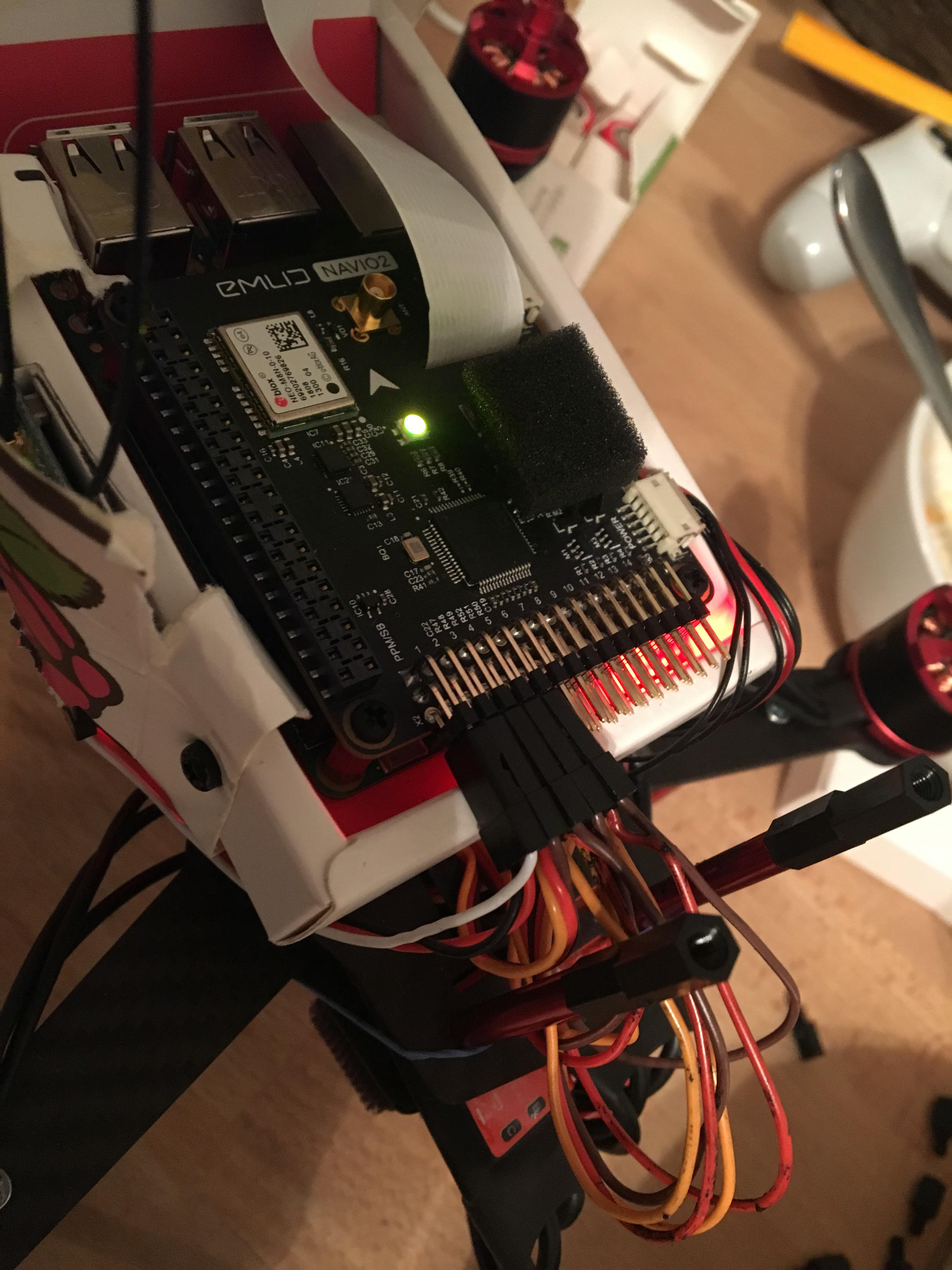
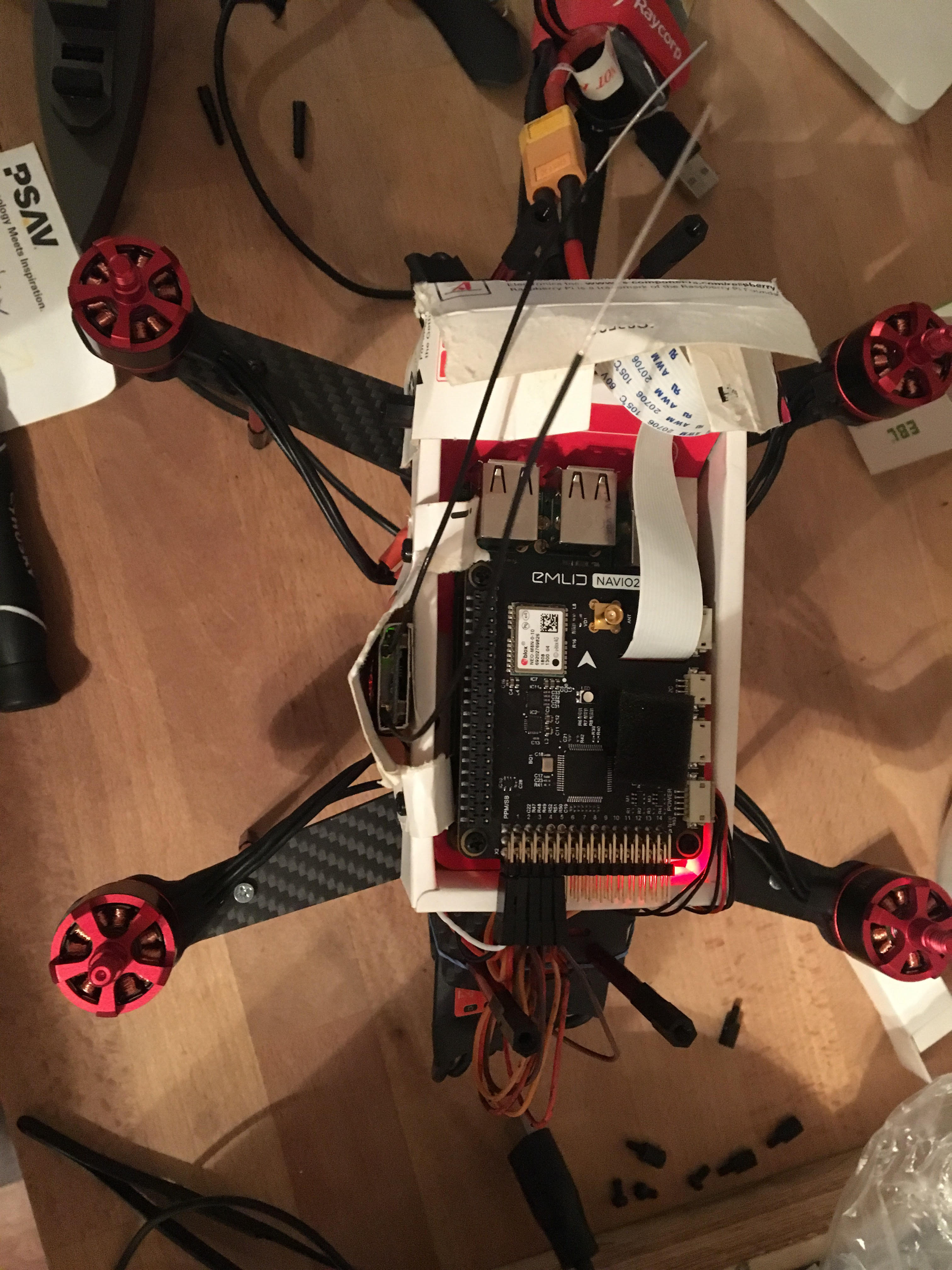
Picture of the setup and connection scheme.
If using any additional hardware please provide exact make and model.
Hey guys I need massive help please! I have gotten this far but now cannot start the motors or calibrate them. I have the latest raspbian image and Navio2 with RPI3. I have simonk 30a motors and the ESC’s that came with it. I have a frsky x lite transmitter controller and a D4R-II reciever and everything is calibrated except for these darn ESC’s.
I have followed tutorials and It just wont work. Ive tried putting the throttle up all the way and turning on the power with the lipo and it will beep and flash but when I try to plug the power back in after disconnecting the light continues to flash multi color instead of the solid yellow.
I need help boys
attatched are a couple photos of my set up
Not always easy… Please can you share your .param file. When in Mission planner “full parameter list” page, you can save the current parameter list to a file.
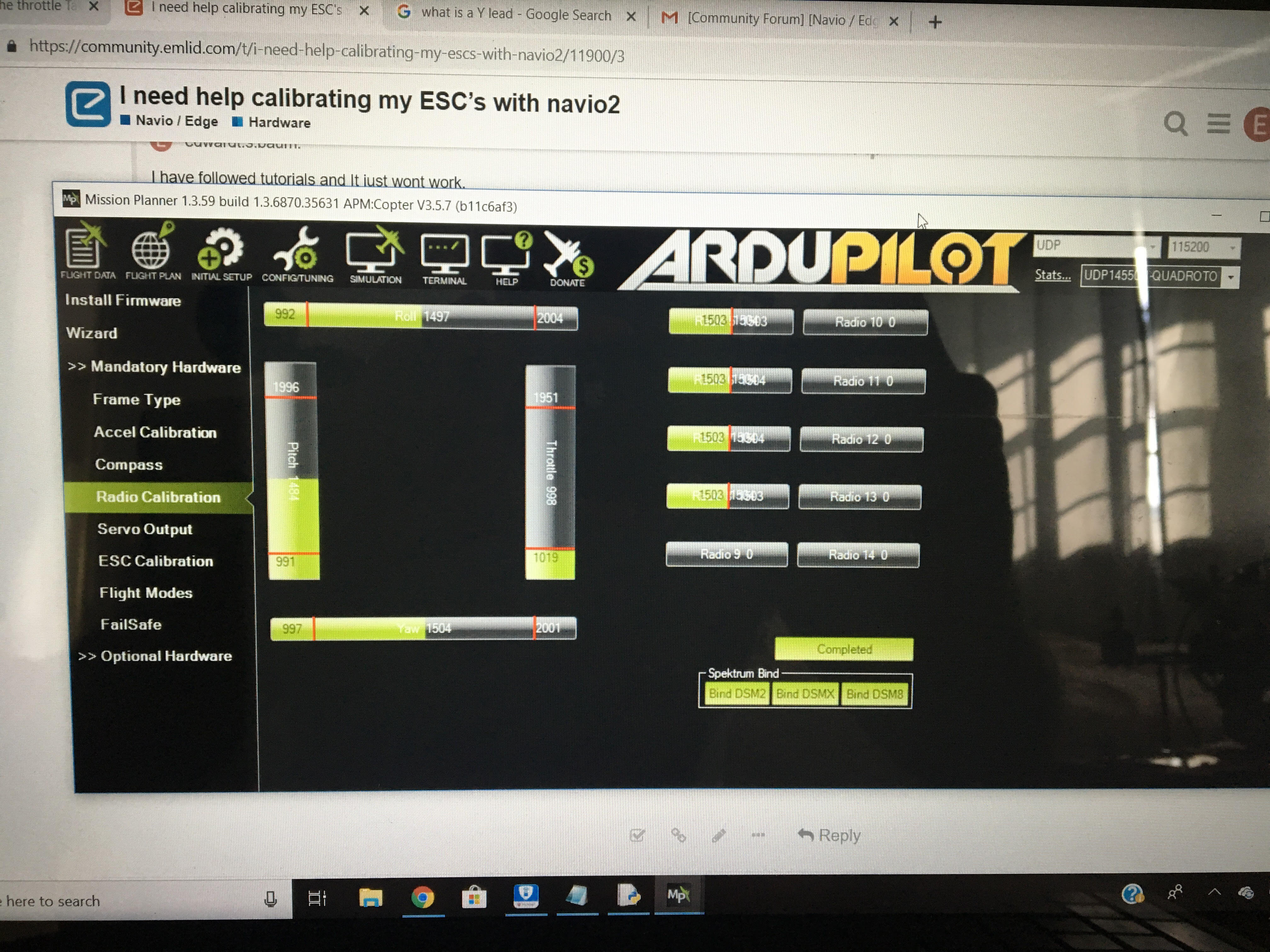
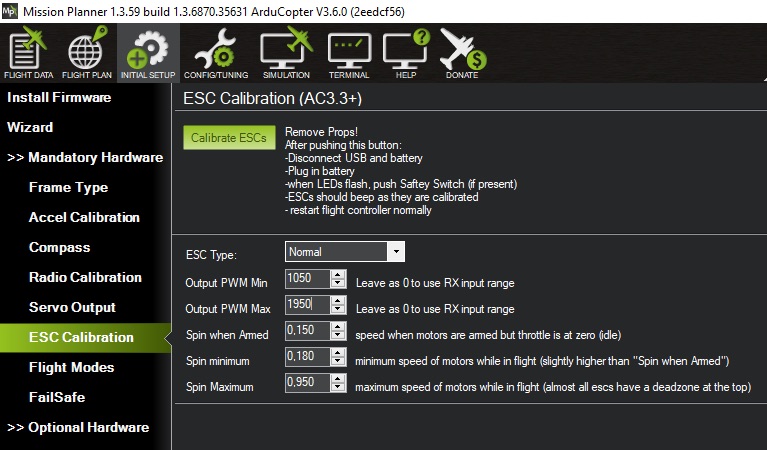
Success of ESC calibration is dependant of many parameters. First is RC Throttle calibration, Min and max should be in the Min 1000-1100 Max 1900-2000 range. I have mine at 1050–1950.
If you intend to use Oneshot it is better to have the full extent 1000-2000. “IF” is to be considered with caution… and may be documented by some Navio users before you try it (I did not).
There is a parameter in Mission Planner to force calibration mode. Follow the wiki to try this method.
I use my Navio on an octocopter. As I have BLHeli ESCs, I did a soft calibration with a BLHeli compatible card (passthrough). Min an Max values (according to my RC tx) are entered manually and saved to the ESC.
You can also calibrate your ESCs one by one with a RC rx.
I had 996 min to 2015 max. I dont know if thats what you meant in mission planner calibration.
I added a picture.
also when I am in Qground control I get a params error like this params -1:r.PSC_ACCZ_P.-1:r.PSC_ACCZ_I .
what does this mean. I have QGC 3.4.4, where do I get the right firmware?
The only time the motors “turned on” was when I did the compassmot calibration with QGS and even then it was just the top left motor and the one under it twitched back and forth. I guess the question is whether its one of these things.
the motors are bad
2.the esc’s are bad
firmware failure with QGS
The the esc’s failing to calibrate
something is going on with my Navio2 witch I highly doubt
What is your opinion?
I have attached a video of the incident. I tried to switch around the esc’s on the navio but same deal, only that motor would work fine. Broken Motors - YouTube
Check motor side by looking if any too long mounting screw is messing with the wiring. If so, change the motor and use short screw.
You can also have bad esc (or bad solders) and one or more wire is not delivering power. Check motors with the know good esc, check ESCs with the know good motor.
I ended up just returning the motors for a replacement set of everything, as it was the cheapest thing to do. I will be investing in a better set of esc’s and motors probably in the coming months. There was plenty of reviews on the product page stating that many customers got dud motors.
I will get the new set tomorrow and I will try it out then. I am not the best at soldering but I soldered each and every one of these wires meticulously and in uniformity so I know the soldering is not the problem because other things I soldered worked perfectly.
I will make sure all my params are set correctly and Will fill you in on what the outcome is when I finally put it all together again.
Again, I can’t thank you enough for all the help Marc.
Till next time
so, i got the new motors and I was able to test each one and calibrate it with the transmitter and RC rx D4R-II. They all work and I tried the all at once calibration with the navio2 and only one of the motors turns on.
I am using ppm on the reciever and I have the connection connected to my navio2 on channel 1 and on the first pin on the navio2
Mission planner is still not calibrating the motors for me. Even after all the tweaks to the params. I have Simonk ESC’s and 2212/920kv motors that came with the ESC’s.
I don’t know what to do man.
Honestly this is really disappointing.
I am starting to regret getting the Navio and should have went with a pixhawk because there is more data to help me there
If all arm checks are ok (or disabled), without propellers, Throttle at zero, Yaw at right for 5 sec, it should arm, and depending of your settings, motors should run at low rpm.