



Hello, I use a Raspberry pi 3 B and a Navio2 for my elevon, but I encounter a lot of difficulties. First of all, I plugged my ESC into channel1 and the servo into channels 2 and 3. Then I activated my arduplane and calibrated my RC. the concern is that the servo does not rote enough and the Throttle does not work. Can someone help me?
Hi Ekani,
In case you have a question about hardware configuration it is necessary to provide the following information to get help:
- Navio2 Image and ArduPilot version.
- Detailed problem description. How does observed behavior differ from the expected one?
- Your step by step actions.
- Picture of the setup and connection scheme.
- Exact make and model of additional hardware
-
Navio2 Image: Emlid-Raspbian-20170922
Ardupilote version: 3.8 -
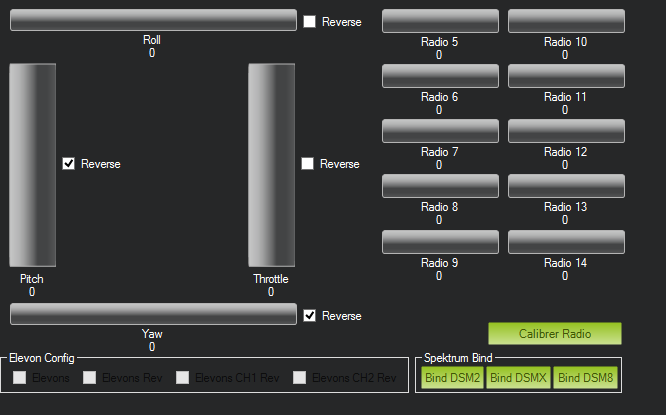
my problem is that my motor does not start, the left wing and the right wing do not rotate at the same angle. I use mission planner and I have as data:
SERVO1_FUNCTION: 4,
SERVO2_FUNCTION: 19,
SERVO3_FUNCTION: 70.
I tried to put the Elevon parameters (SERVO1_FUNCTION: 77, SERVO2_FUNCTION: 78, SERVO3_FUNCTION: 70) but the result remains the same and the servo loses force.
-
- I followed the tutorial Introduction | Navio2
- I connected my 2 servo on channels 1 and 2 and my motor on channel3
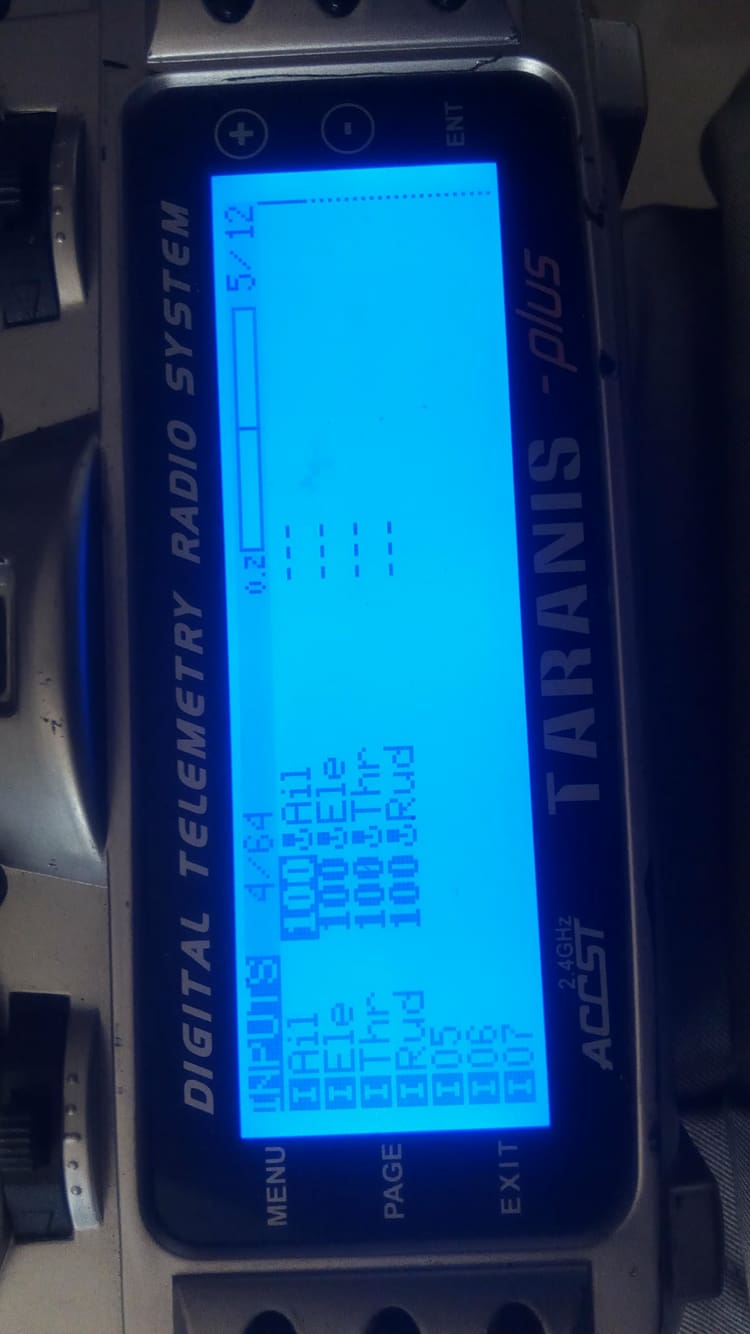
- I use Taranis Plus as RC and an X8R receiver
- I then performed the calibrations: accelerometer, compass, RC
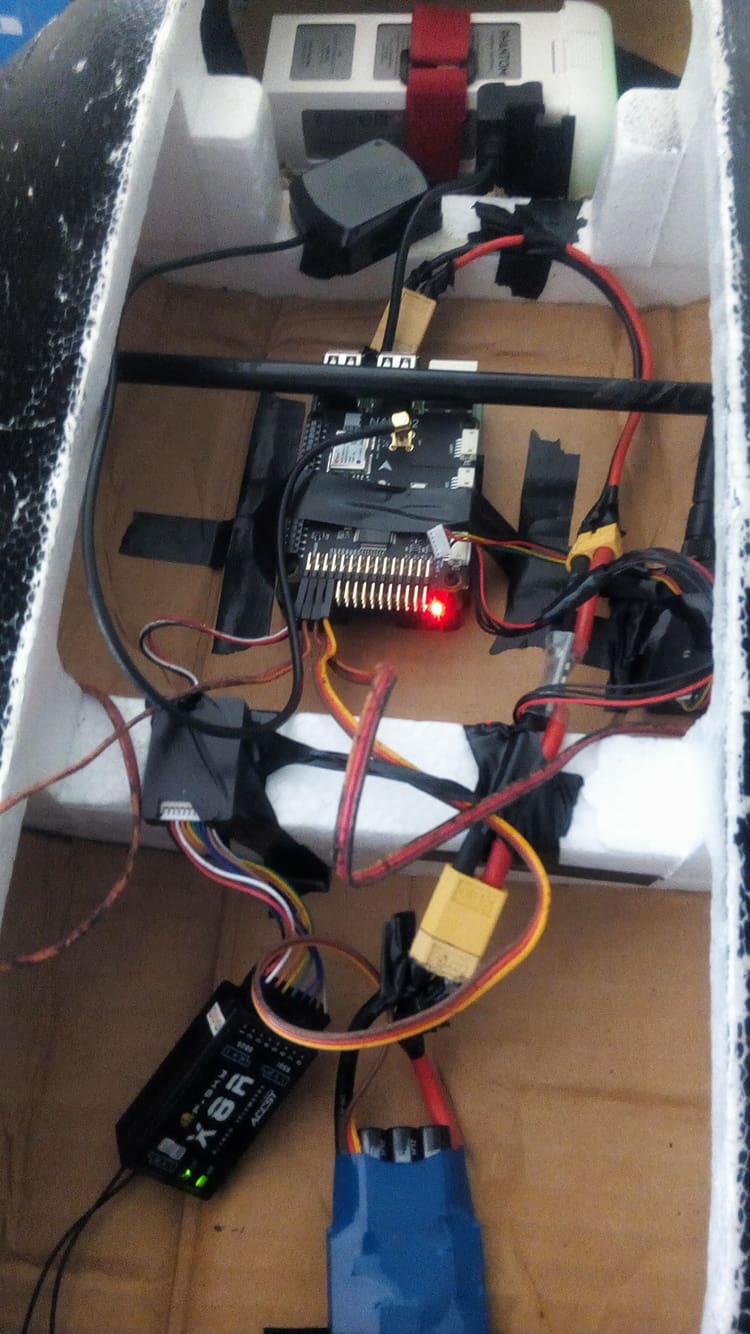
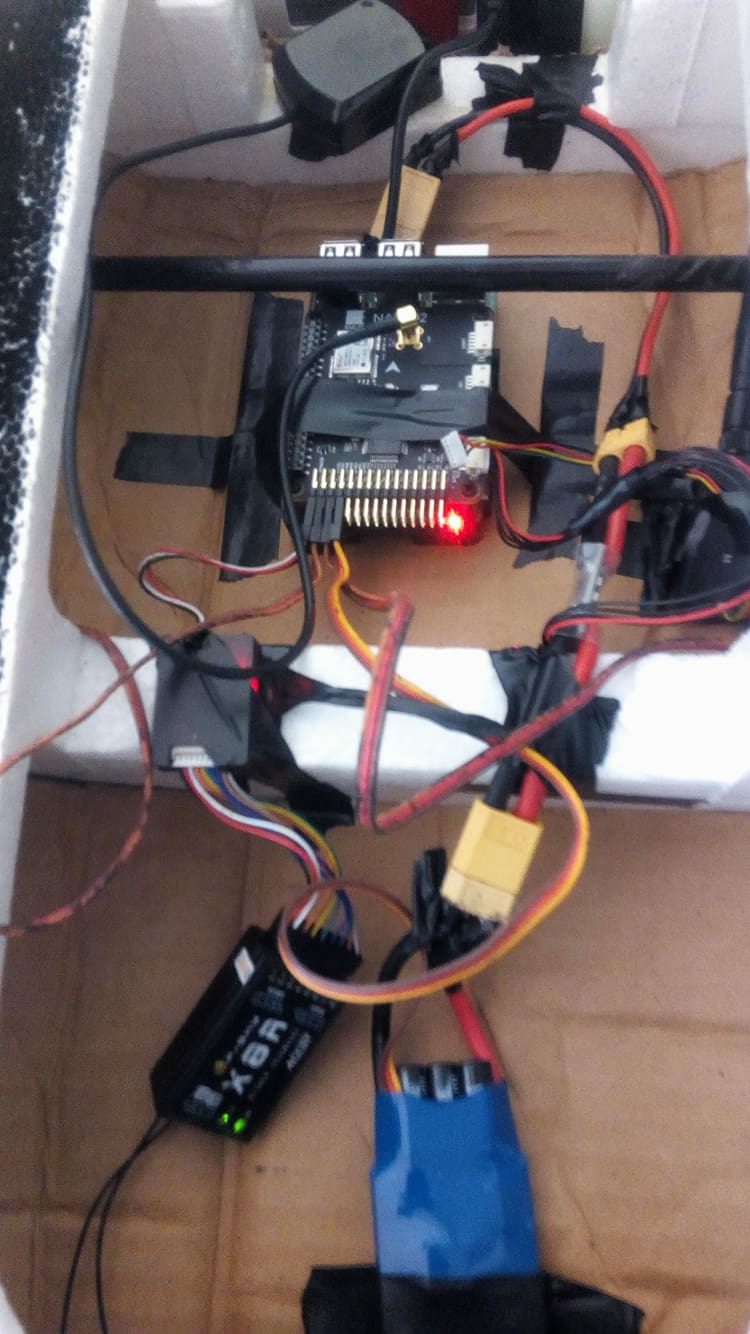
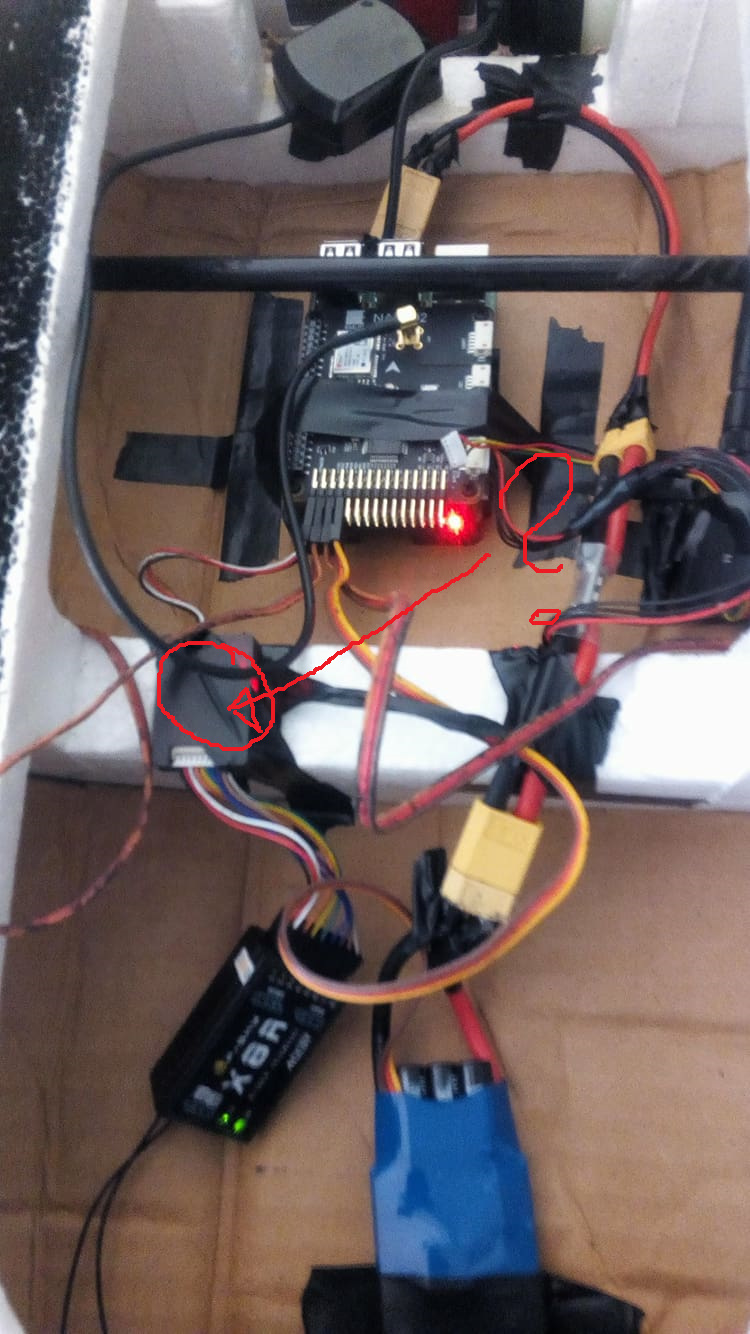
It’s a PPM encoder. when I connect the X8R directly to the navio2 like this
. Mission planner no longer takes into account the RC.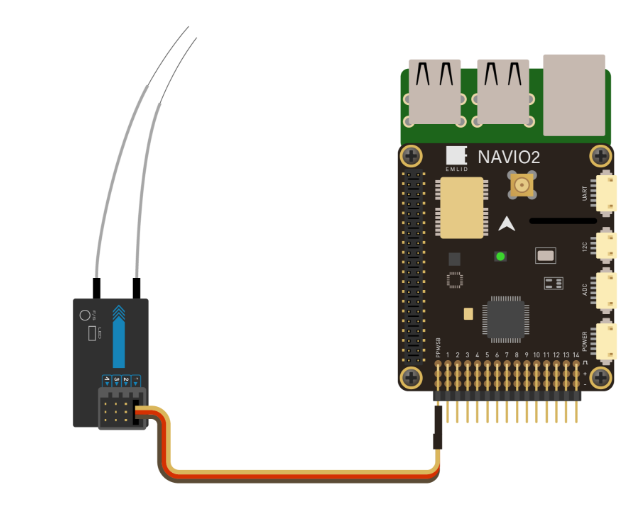
Not sure why you use it, but i think its causing you problems.
I have almost the same setup and use one a single servo lead from Sbus on X8R to Navio
1 Like
Thank you so much for your help. The servos works just fine now. But the rotor does not work.
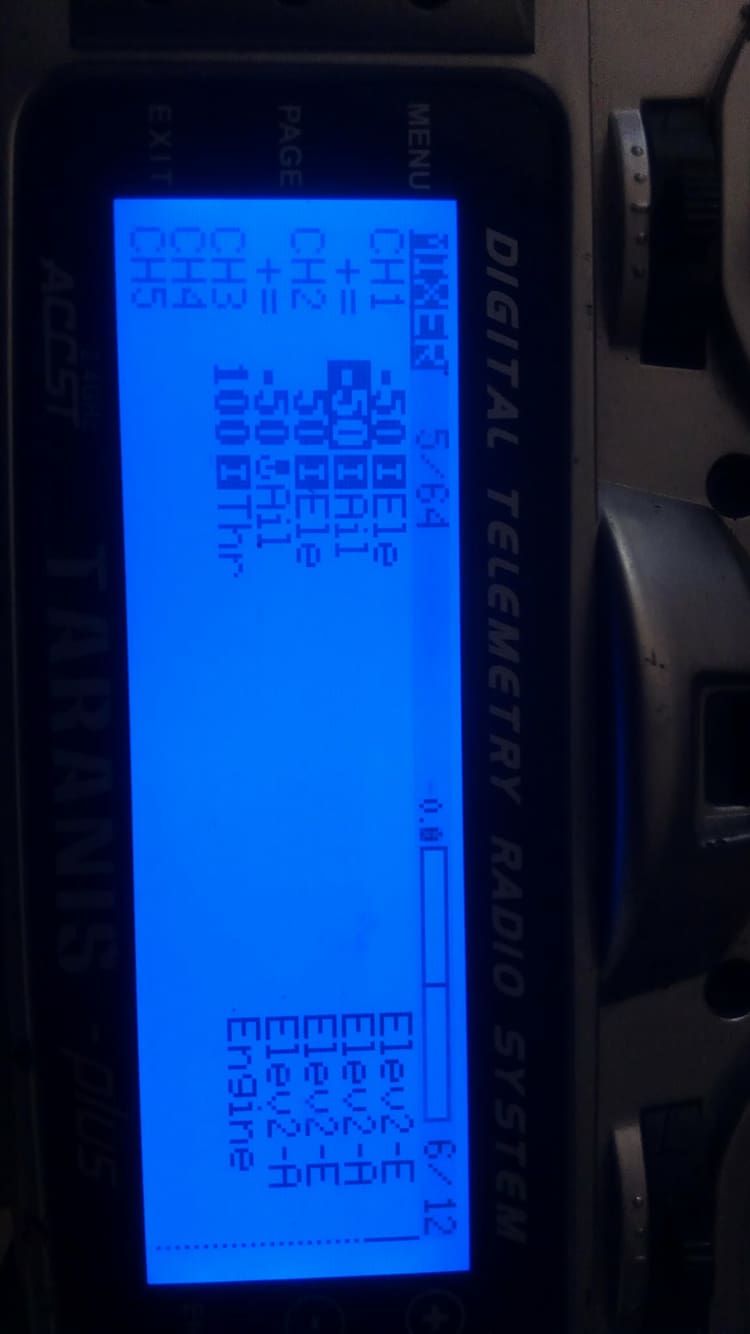
You might need to redo the entire calibration in mission planner , and also reset mixing on your Taranis to zero (no mixing input)
http://ardupilot.org/plane/docs/guide-elevon-plane.html
Thank you very much more your help.
1 Like