Natapat,
I went through a long hard learning curve and I will answer you from a non-surveyor Pilot perspective. I am going to talk in simple non technical terms. My post below is for any newcomers in the forum learning GCP collection. I fully know the struggles of learning this stuff!
First off, you have to use software to process your log file from the Reach. I use EZsurv which is a paid software but VERY very easy to use and works very nicely. There is a free software called RTKlib but it is very hard and nobody has done a video that explains how to use that software for collecting and processing GCP’s (start to finish fully explained for a newbie)
If you are new to mapping and GPS processing then you REALLY need to watch this video from 2015. It is a very simple but yet easy to understand video (1 hour 25 minutes) and it will help you understand why you must correct (post process) the data you collect in the field (ie your Ground Control Points). EXCELLENT video.
I have done a very short version of how to collect ground control points and process them here:
A full comprehensive video will be ready in the next couple of days.
Before you ever start doing mapping for business you need to know that you can survey a known point with accuracy. You can find known points (aka Benchmarks) that are close you (USA only) by visiting this site:
https://www.ngs.noaa.gov/NGSDataExplorer/
I have a short video on how to do this here. I am using EZsurv but maybe someone will make a very easy to follow for UAV pilots using RTKlib software (or any other software).
If you have a CORS station within 15km of your Mappnig mission then having a Reach Base is not an absolute requirement, but still a good idea. I will always set one up. The base unit (whether a CORS base or the one you setup on your mapping site) is used to “correct” the original data collected by the Reach Rover. And after watching the 1.5 hour video above, you know why corrections are necessary. When you have a CORS unit (which is a “base”) within 15km then you are using that . If you are using a Reach “Base” then you will have to first “correct” it’s position to be absolute and then use the new corrected position for corrections on your Reach Rover file.
One thing worth noting. If you were going to be flying a mission over and over at the same site, then you could create your own Benchmark. Then survey that benchmark for the required amount of time to find it’s absolute location. Now on future missions, you can setup your base over your new benchmark and manually enter the known coordinates. Then provide RTK corrections from the Reach Base to the Reach Rover and no post processing would be necessary.
The general steps for Ground collecting and processing GCP’s are.
- You must first determine how far your flight mission is from the closest CORS station. You find that out here. You just enter city and state and it will bring them up on the map.
CORS Map
You MUST know this because the distance of the CORS unit is telling you how long your base unit must log static (stationary) to post process it’s location with CM level accuracy.
15 min : CORS stationi within 15 km
30 min : CORS station between 15-20 km
1 hour : CORS station between 20-30 km
2 hours : CORS station between 30-45 km
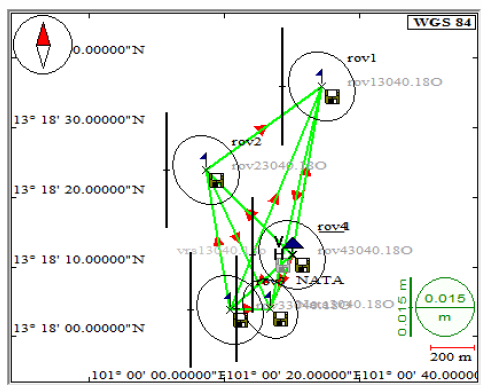
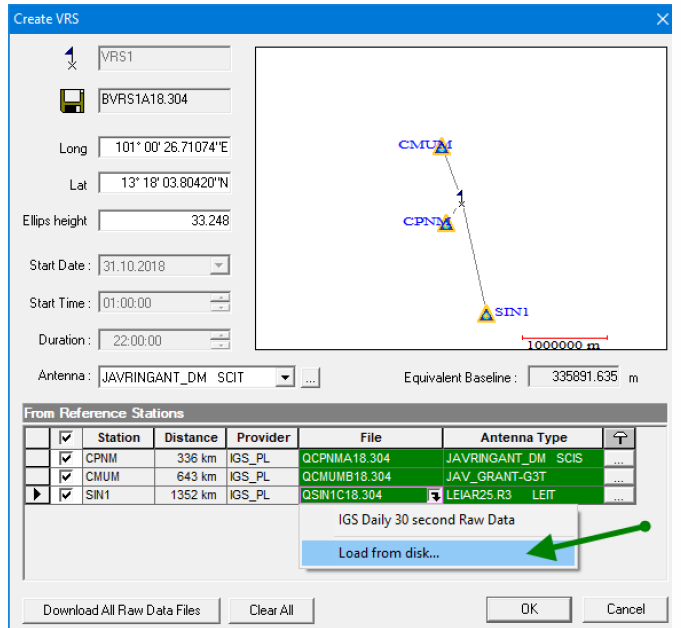
If you are only going to use a singe Reach Rover (no Reach Base) then the CORS unit can not be further than 15km. If it is then you would either have to have an onsite base or create a VRS. There is a recent post on VRS (virtual reference station) but I have yet to fully learn that process. The guys on this forum are actually very brilliant and they sometimes forget that there are many non-brilliant folks who need this in layman terms. We can all learn how to do this stuff if taught in way we can learn 
-
If using an onsite Reach Base, Log your base unit for the required amount of time in unobstructed sky. I actually create a Single Point survey in the ReachView app, even when using my base.
-
Survey your GCP’s with Reach ROVER. The unit must log for at least 30 minutes in unobstructed sky. It does not matter if it only takes you 10 minutes to survey your GCP’s, you still let the Reach Rover log for a minimum of 30 minutes. Longer is always better. So when you go to the field to fly your Mapping mission, you set up both the Base and the Rover and have them start logging before you do anything else.
-
After collecting your data and you head to the office. You will first correct your Base unit. After you correct your base unit, you will then use that as a “reference base” for the Reach Rover survey that you conducted. Provided that you collected good data, and you did everything properly, you will have very good accurate data for your GCP’s. You can then export a CSV file with coordinates to import into Pix4D or what ever drone mapping software you are using.
I will post the full GCP 101 video as soon as I have it ready. That video is for one group, those new to GCP collecting and trying to learn how to Post Process your data. No technical stuff that you can’t understand, just simple how to video. Then once you learn the basics, all this other technical stuff will actually start to make a “little” sense





 using Emlid Reach RS and EZsurv")