I have two Reach RS and I want to survey ground control points for drone mapping purpose. I have coulple of questions related to how to collect data for post processing:
1- How to check in Base and Rover in Reach RS that it’s ready collecting enough data for post processing?
2- For Rover, how can we measure all points needed to be surveyed? Should we measure one point then turn it off, then move to next points?
3- Any specific settings for the post processing purposes? How to correctly enter the height of the poles/tripod?
It would be very helpful if experienced people could kindly create some detail tutorials with Reach RS post processing.
I have a couple more videos cooking with Qgis as survey/stakout and mayby cogo if i get my head around it.
Its easter holidays,so things are running slow at the moment…
Thank you for the link and thank you @TB_RTK for taking the time to make it. It was very useful video. I followed the video and it worked great. However, I have couple of questions that I hope @TB_RTK could kindly answer:
1- Do you know any similar apps that work on iOS devices?
2- If we put the Base on a BM, how could we correctly enter the Z in the ReachView app? For example, let’s say my tripod is 1.50m (I mean how can I correctly measure the height from my BM mark to the Reach RS?).
Once again, thank you so much for your kind responses.
@TB_RTK, could you kindly make some videos tutorials for collecting data with two Reach RS for post processing purpose? My main intention to use my two Reach RS is for measuring GCPs for drone mapping. RTK is not always working in my study areas and we need to get the most accurate measurements with Reach RS.
I find topographer easiest to get point in and out. Not sure about any others. There are some other BETA apps from users on this forum, search for app and you should find it.
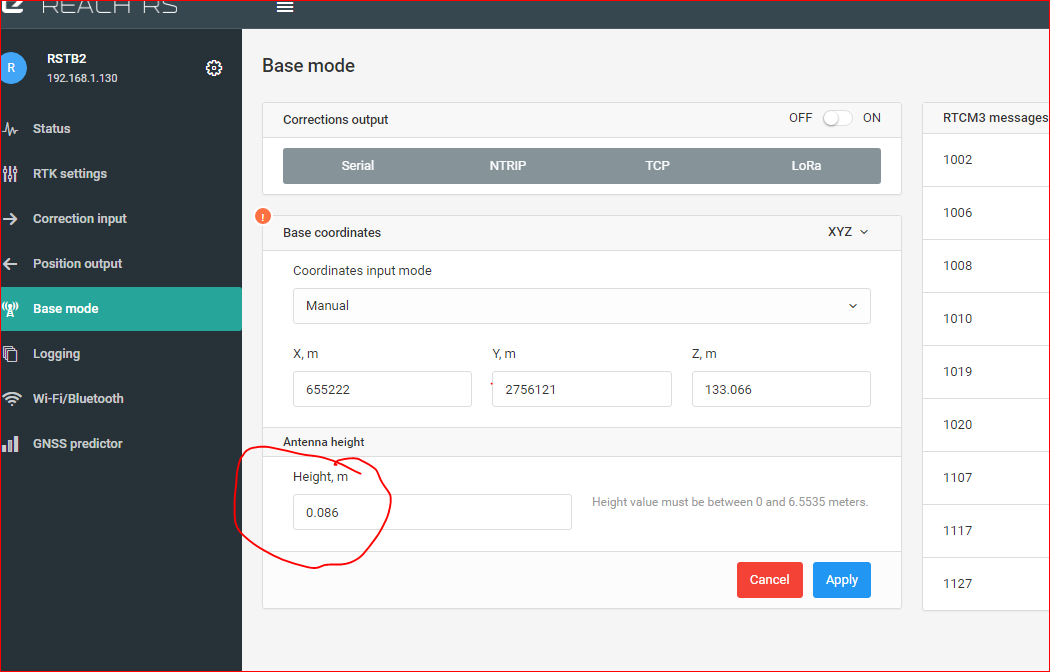
From bottom of RS to Phase senter = 65mm
So, if your tripod is 1500mm, the total offset height is 1565mm.
You set 1.565 value right here at the base
So if we put the reach RS on the point the we measure, its antenna height is 0.065m, right!? Could you recommend good quality and affordable tripods and poles for Static and moving rover RTK? Thanks a lot for your kind response.
Yes I did read it. But my question is how long should we measure at each point to get enough data for processing? 30 minutes at each points? Should we turn off and on Reach RS rover each time we measure a new point? Or we can use one log file for all rover points?
Not my area of expertise but i think enable/disable raw log is ok when points are close by.
How long depends on how good coverage and signals you get. So time is relative.
For postprocess, you dont. Nobody knows acutally. Unless i have missed a lesson here?
In RTK mode, you will see in reachview when fix and the quality of the solution yes
@TB_RTK I just saw your video here: Reach RS, RTK and postprocessing difference points and height measure - YouTube. I am very thankful for that. I have some questions:
1- How did you measure the antenna height to be entered in the Base setting? did you measure from the ground up to bottom of Reach RS or up to the top where we put the Reach RS antenna ?
2- In Emild docs: Kinematic processing | Emlid Studio, it seems that we should use both raw files from Based and Rover (maybe I was wrong with the reading). Should we use raw file from Base or RTCM3 file from Base? Will the results be different?
3- Is it possible to get just the coordinates of the FIX positions of P1, P2, and P3 as the final results?
I used a measuring tape from bolt in the ground to bottom of RS, and then added 65mm. I measured 1204mm and added 65mm = 1269mm = 1.269m offset added to base.
You could use raw from base and rover. Or you could use raw (.UBX)and base correction (RTCM) from rover. The result should be the same, it all depends on how you postprocess. Not all has access to base, only recorded data at the rover.
Well, yeah. When you have fix the coordinates barely change. Just copy it off the screen or use topographer to save it into a list. Also rtkplot har waypoints you could save it to.