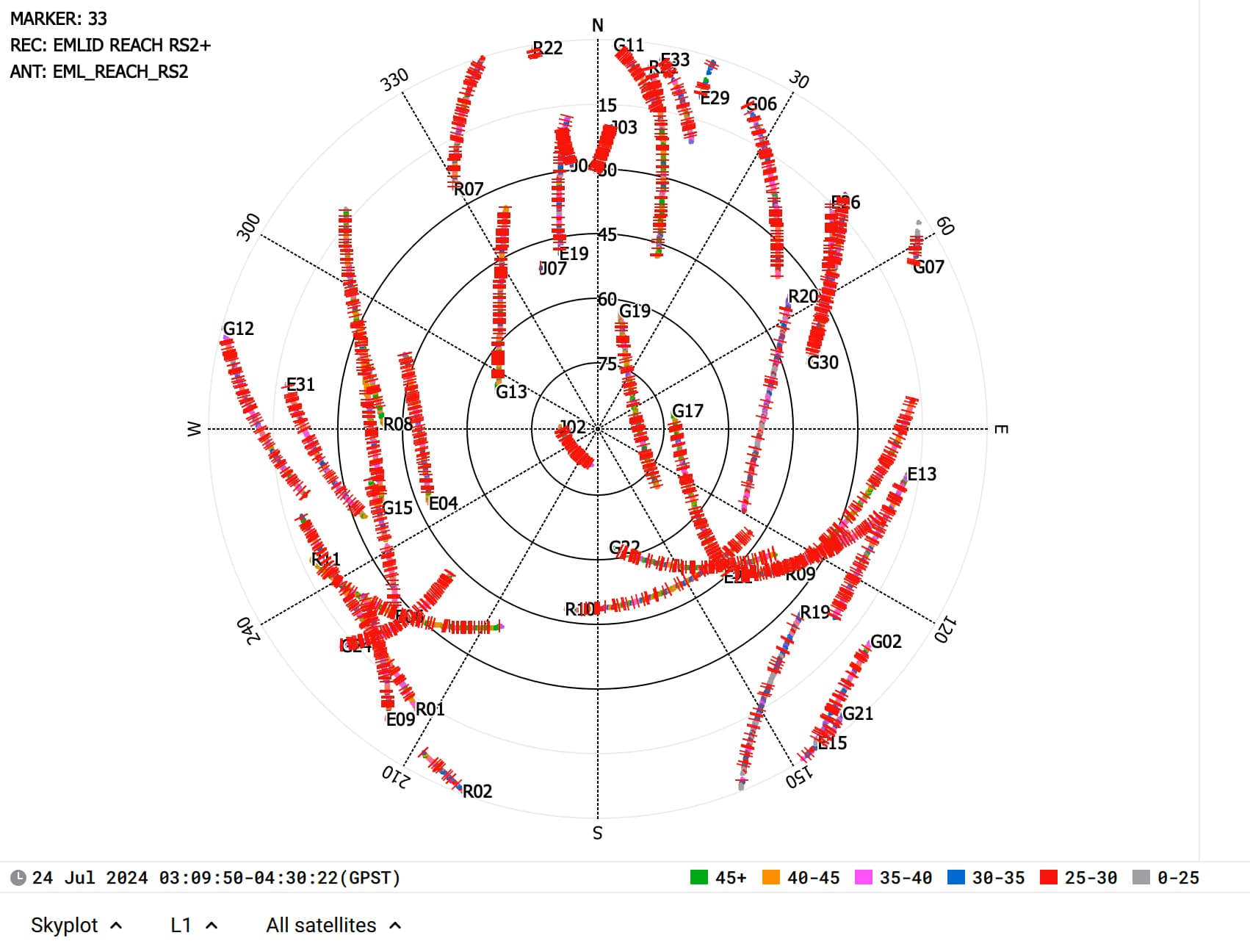
I checked the data you sent us, and it seems the receivers are experiencing some interference (electronic or field obstacles).
The rover’s data shows several broken cycles slips, which means there is some interference between the receiver’s communication with the satellites, causing it to not achieve a fix solution.
It’s hard to give a specific reason, but it could be caused by the environmental conditions of the area you’re surveying or some electronic device nearby that is interfering with the signal.
Below is the data information for the satellite visibility tab and the sky plot. You can see that the signal frequency has many gaps and interruptions. This guide explains how the data on Emlid Studio works.
I would suggest a closer base if possible (on site) where you baselines are short. It’ll help in PP your data as short baselines will converge quicker with a fix solution.
I always have a base on site of our boundary/flight projects. Even if you’re using RTK/RTN. If for any reason you loose RTK/RTN, you can still PP your points. Especially if a point has a questionable position. It will save you time and $$.
I’d also increase logging time to a minimum of 3 minutes. for each GCP. If you’re PP using the targets as control, it’s imperative to have good accuracy for both the horizontal/vertical components. This is where all your final data will start.
Also make sure your base is logging at the same interval rate as the UAV. If not, you won’t get good results.
We ended up going back and re measuring all the GCP’s at a longer observation and for the most part they have all come back great.
I am trying to get the Local East and Northing though once i complete the Stop and Go Process and am struggling on how to do this. Can you point me in the right direction
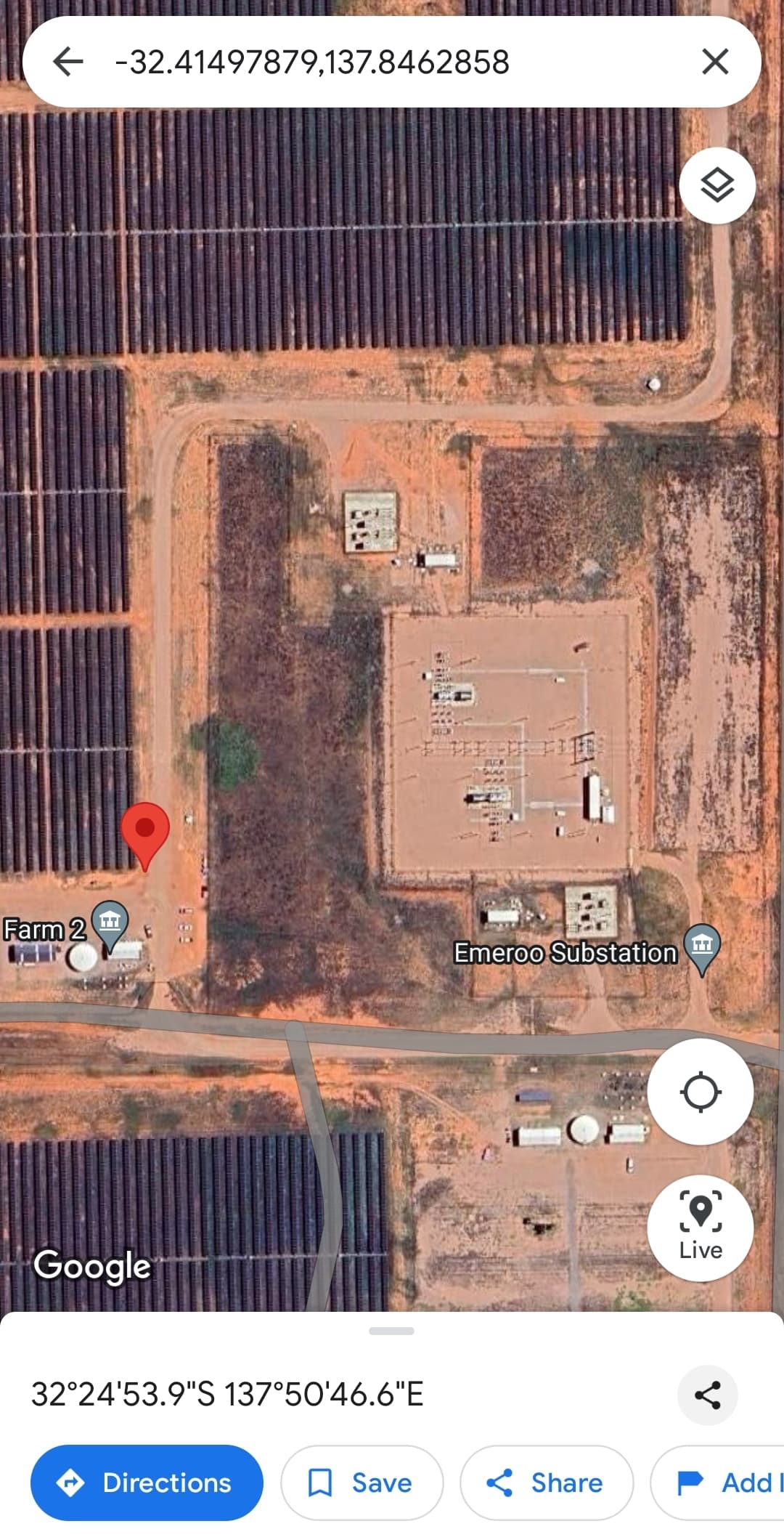
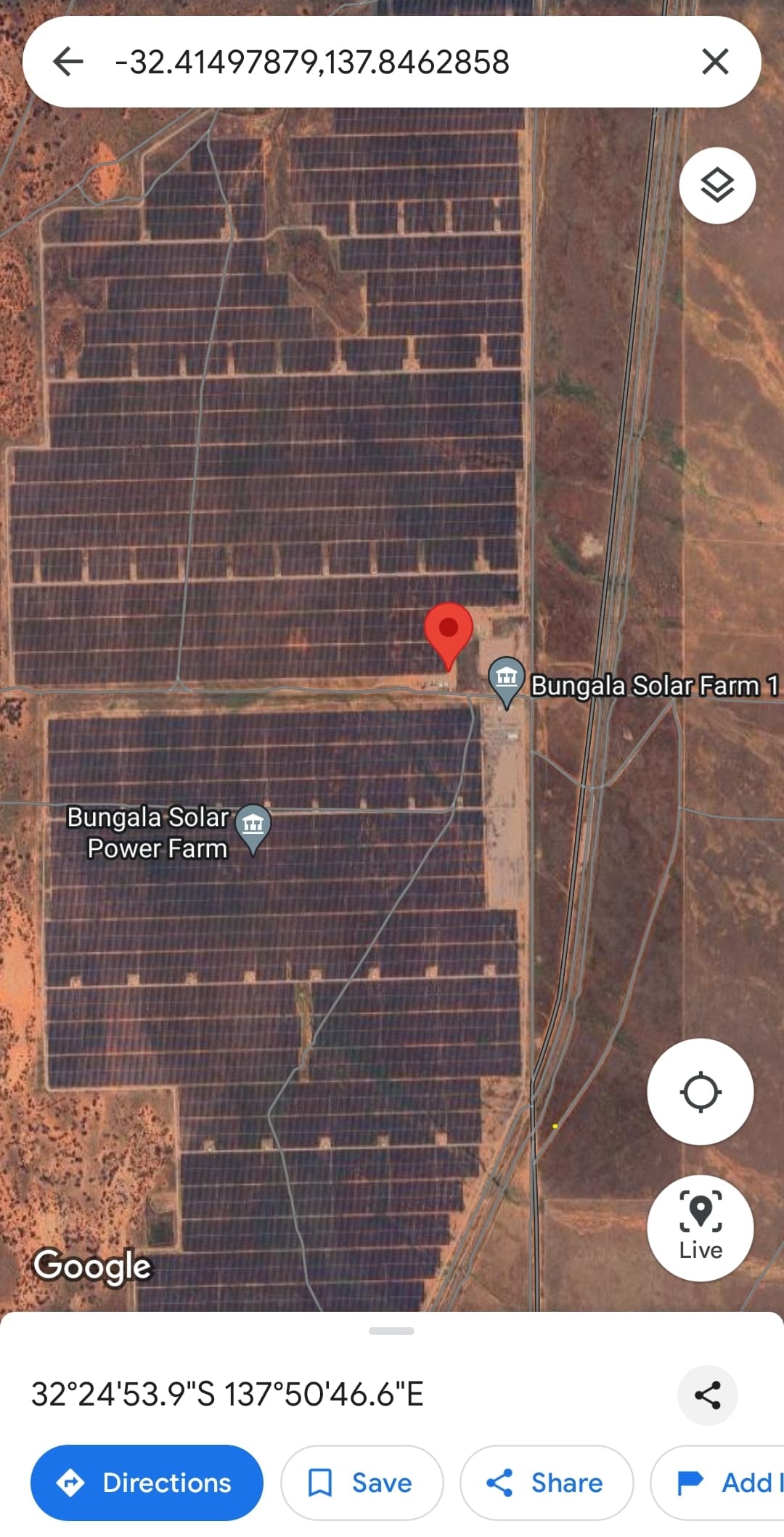
For the broken cycles, it’s difficult to pinpoint an exact cause, but as @timd1971 mentioned, the environment you’re working in could have an impact on your data collection. For instance, an electrical solar power plant might generate electromagnetic interference that could affect GNSS receivers.
Regarding the Local Easting and Northing coordinates, we recommend creating a new project in Emlid Flow 360 and importing your collected data. This will allow you to switch from a global coordinate system to a local one. We also have a Support Tip on our Community Forum that explains this process in more detail.