Under base mode in RS2 setting I’m trying to set average fix for 10min observation time,but it’s keep loading as “trying to fix” and after 10min it’s not fix and didn’t get base coordinates also .
But when I try with average single for 1min it’s getting base coordinates…
I believe this is not the issue, it is rather the interface’s features of Reach Panel: it looks like you navigated to it instead of sticking with ReachView 3. I’ll try to explain what it means.
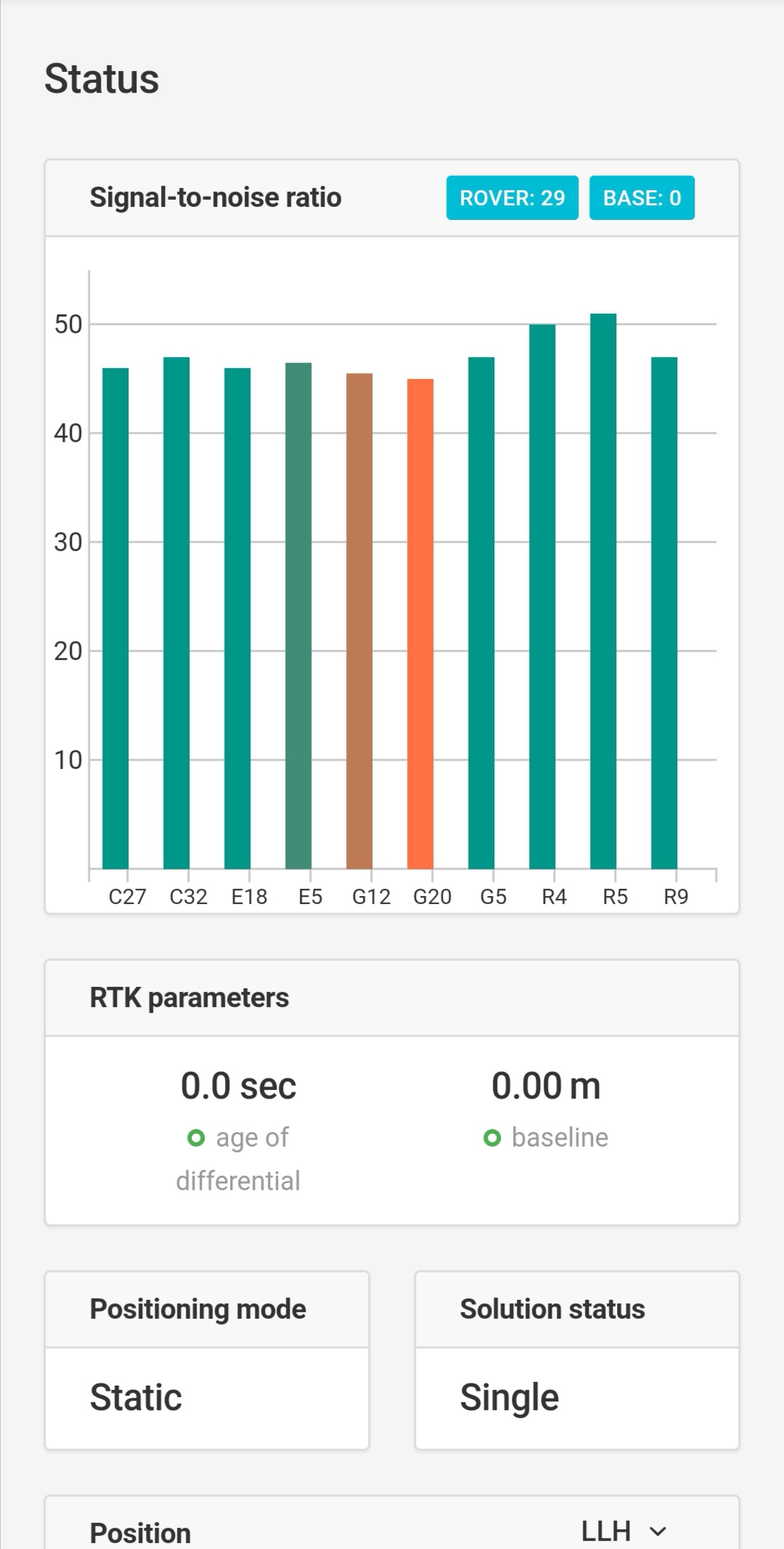
The Reach device can be configured both as a base and as a rover at the same time. That’s why each unit by default defines itself as the rover. So the number of satellites on the rover is, in fact, the number of satellites on your base.
The base’s sats are zero since your Reach base (which defines itself as a rover, again) isn’t getting corrections from any other 3rd-party base.
Hope this makes things easier for you. I know it’s quite a tricky way of showing sats number, and we’re working on improving this situation. Actually, if you open the ReachView 3 => Status, it should be easier to evaluate the current state of the unit without thinking about the bases defining them as rovers
It is how it should work. To average position in fix, your base should be getting corrections from any other 3rd-party base.
Could you describe your use case in more detail so that I can give more specific recommendations on how to set up your base?
Understood now how base is working with known point and single ,float and fox solution status.
I have one more question here .I was entered known coordinates and started base …but sloution status showing single only …it’s normal?
With same RS2 base we have tried another location and turned on rs2 base.but still it’s data logging with previous entered coordinates only untill we have change it…this will create issue when Post process.
When come to auto logging of raw data it will create above problem.?
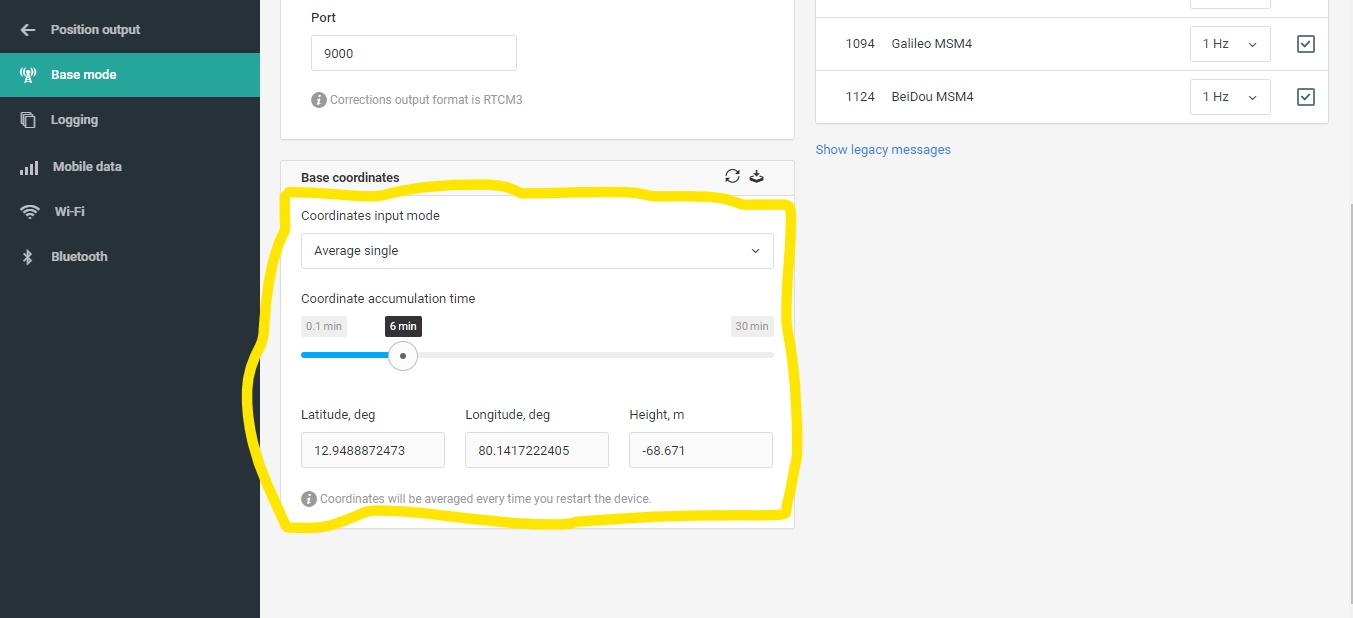
from the above screenshot this was yesterday setting as AVERAGE single.
Today when i switched on and connected to REACH RS2 base and opened base mode setting, but its already started accumulating the data with previous correction input mode.
my doubt is if i want enter known point i can enter and restart the process but if i enable raw data logging automatic its already start logging when i switch on the BASE.
if i change correction input mode does the raw file logging merged or it continue with name of same file.
if continue in same file log it won’t problem while processing?
I have one more question here .I was entered known coordinates and started base …but sloution status showing single only …it’s normal?
Yes, it’s fine. The base will show Fix or Float only if it receives corrections from a 3rd-party base. If you set the base by entering the known coordinates, it will show Single.
my doubt is if i want enter known point i can enter and restart the process but if i enable raw data logging automatic its already start logging when i switch on the BASE.
If the base is set as Average Single, Float, or Fix, Reach starts to average the coordinates automatically each time you turn it on. If you’d like to use the same base coordinates for a future survey, you can save them to manual by pressing this button:
if i change correction input mode does the raw file logging merged or it continue with name of same file.
If you connect to another base in the Correction input settings, ReachView 3 doesn’t split the log automatically. You will need to stop the previous log and start the new one manually to post-process the data correctly in RTKLib.