Hello,
I am relatively new to the use of Emlid products and the PPK workflow, and I am trying to figure out why some of my points get a Fix but others are only Float.
For the most part I have been using this resource as a guide.
Last month I did four rounds of collecting points using Reach RS2 as a rover and Reach M2 as the base (some of the points were GCPs for drone mapping, and others were to obtain the coordinates of trees and similar objects). I’m having this issue with all four rounds of data collection when I process the log files in Emlid Studio (Stop & Go with ReachView 3).
For the data in the above link, my initial attempt in Emlid Studio got a Fix for 23/36 points, and Float for the others. Then, after following the advice in this post, I changed some settings and my results improved to getting a Fix for 31/36 points.
However, I’m still trying to figure out what might be causing the problem for the remaining points that are Float. These are some things I’ve wondered about:
Are there any additional Emlid Studio settings I could tweak that might improve results?
Was my base station perhaps not in an open enough area? I placed it in the center of a clearing, but there were trees at the edge of the clearing. I don’t have a good photo of the whole area but here’s how it looks in Google Earth:
Could my RS2/M2 settings be a problem? In this post, user Zaz5400 seemed to indicate that different logging intervals between base and rover could be problematic. I used 1 Hz for the base and 5 Hz for the rover.
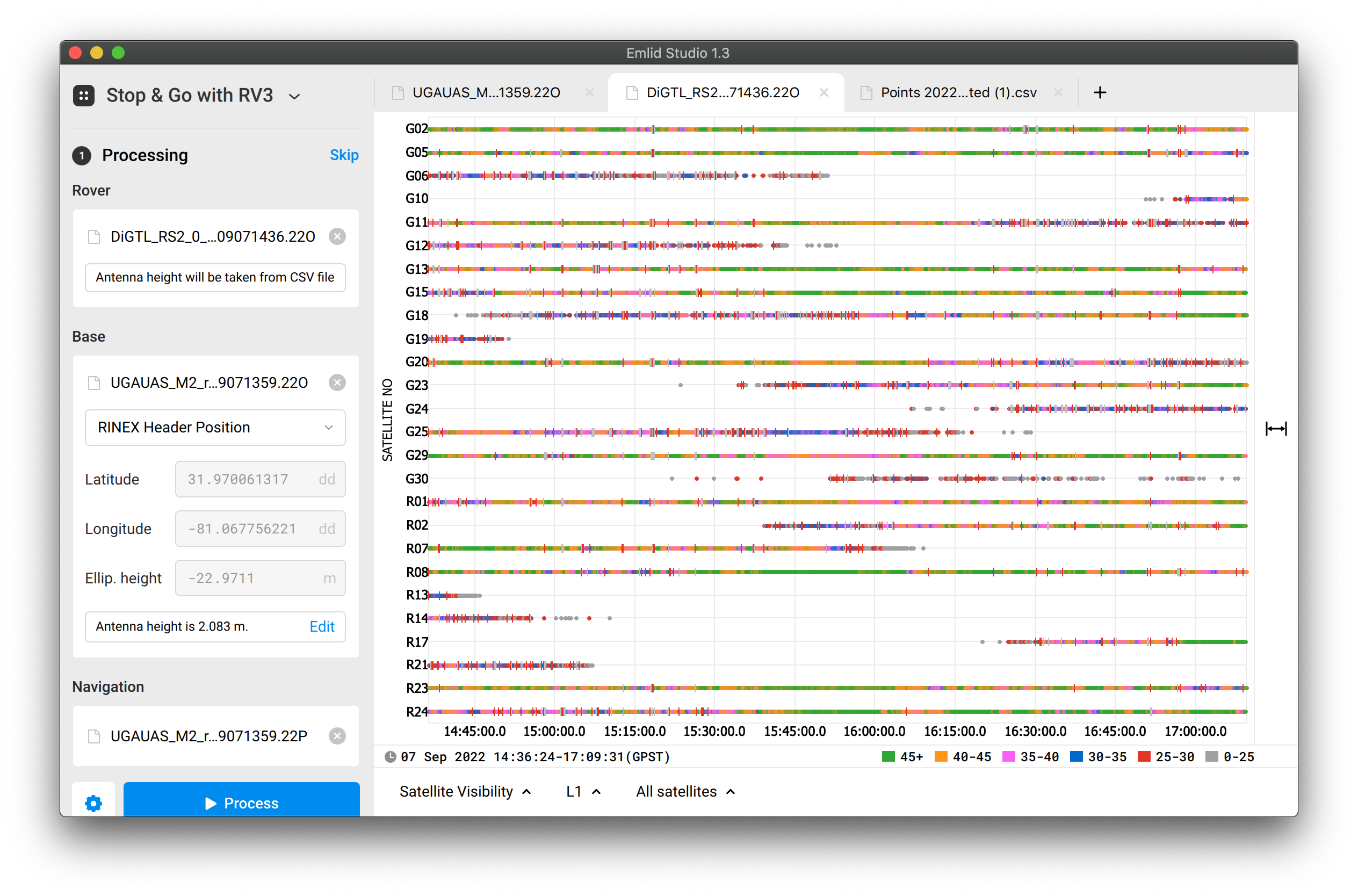
I’ve checked your logs. The main reason for points in Float is that you’re working under trees, and the raw data quality is quite poor. There are many cycle-slips showing the loss of the data:
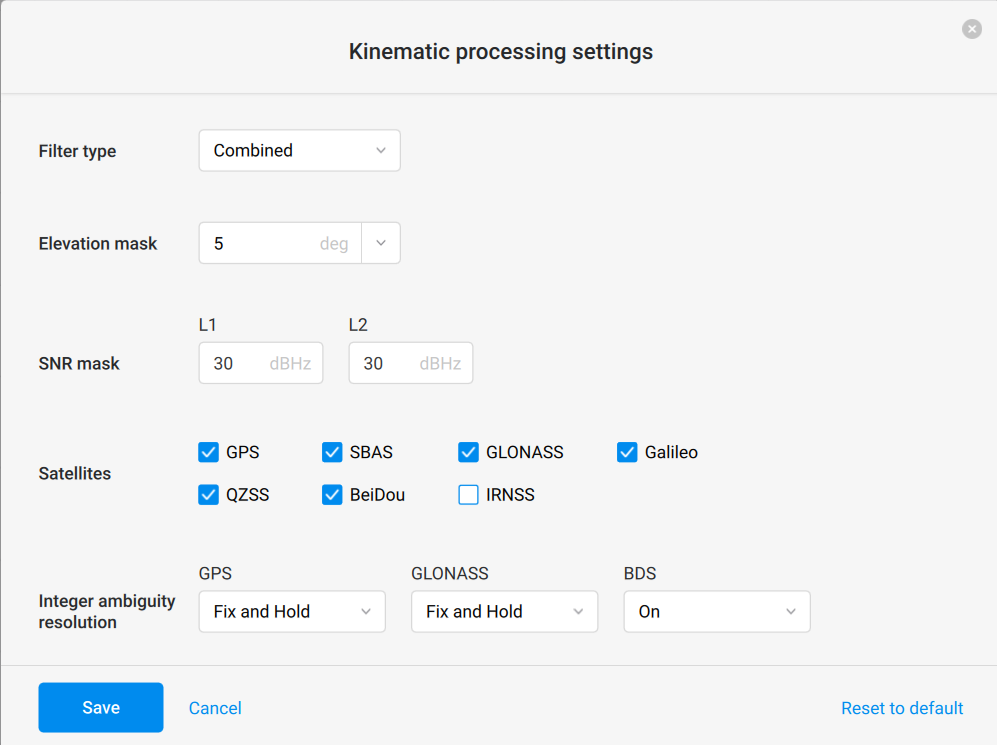
It doesn’t mean you can’t obtain a Fix, but you really need to play with post-processing settings. And maybe not all points will be in Fix. For example, the best result I got is 28 points from 36 in Fix. I set the Filter type to Combined, lower the SNR mask to 30, and the Elevation mask to 5.
Mostly, the Combined filter type helped, of course. This is the first thing to try when you have poor data quality. It allows ambiguity resolution go forward and then backward and chooses the best solution.
Also, I noticed you recorded points for 30 seconds. If you’re working in challenging conditions, I suggest recording them for a couple of minutes. This way, Emlid Studio will have more data to calculate a solution.
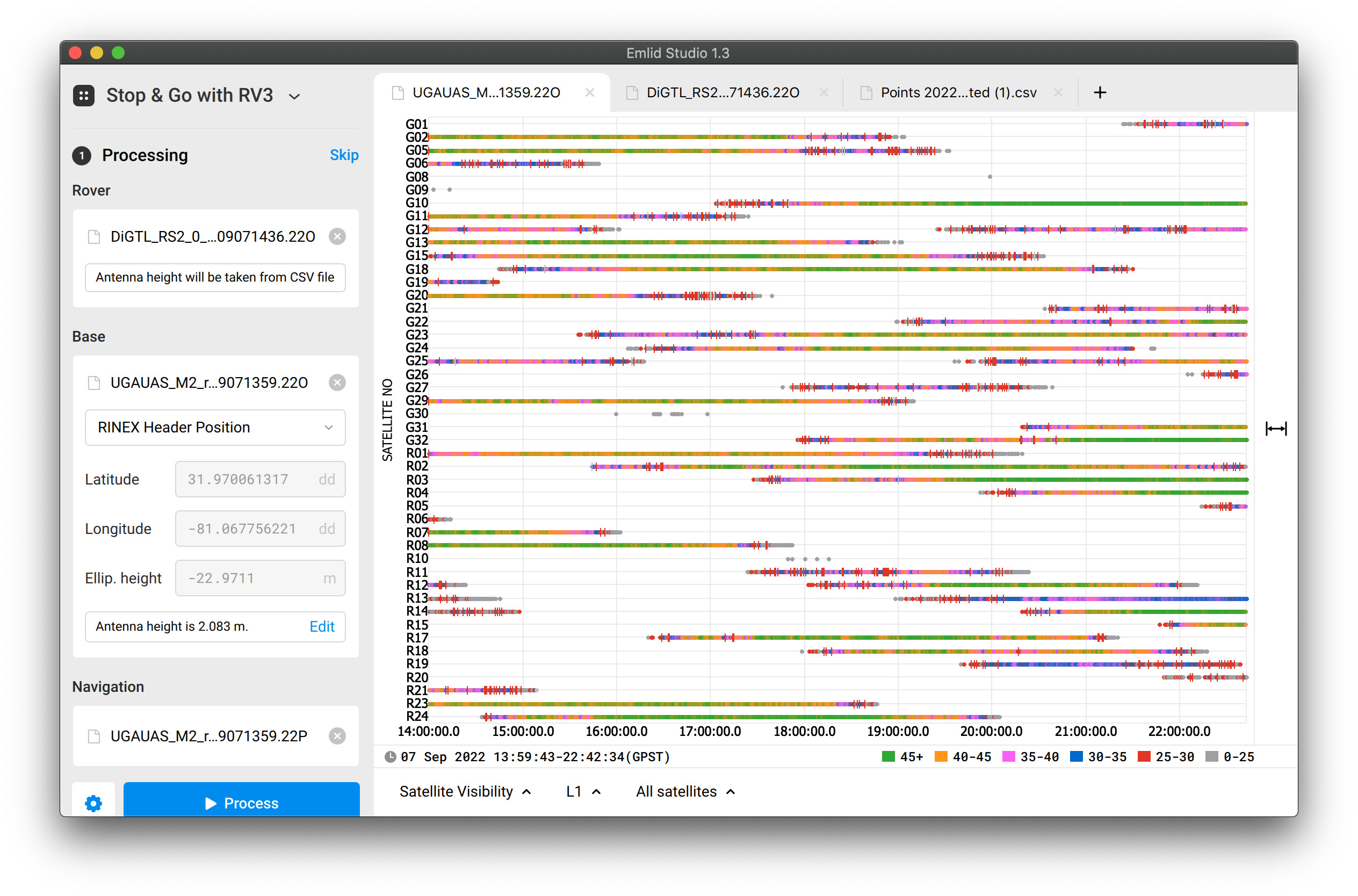
Base data could be better, the SNR is jumpy a little bit, but it’s good enough. It’s not the base who causes issues:
This gave me a Fix for 33/36 points, which is the best result I’ve gotten so far. I might have to live with that.
I was also wondering, with regards to changing the Elevation and SNR mask values, does loosening the strictness of these parameters make the resulting Fix coordinates less accurate than they otherwise would be?