



Thumb up ![]() That’s what I need to have a complete solution. I mean, the antenna offset to be specified in correlation to the camera photo centre like in front/back, left/right and abowe camera.
That’s what I need to have a complete solution. I mean, the antenna offset to be specified in correlation to the camera photo centre like in front/back, left/right and abowe camera.
1 Like
Hi Emlid crew,
You are doing a great job but I’ve found some problems that I don’t know how to solve. The trouble is Base RS2 file and the M2 file that are giving nice Fixed solutions when the base is used with it’s Header coordinates but when I correct those coordinates to the proper position, that is just couple of meteres away, the whole calculation becomes FLOAT.
https://drive.google.com/drive/folders/1ft6CRegvN1DZLL0P0xp1NybFR-cUCB6y?usp=sharing
There is a link to those files if you want to test it yourself.
The corrected base position was calculated from the State VRS system and the files are also included.
Darko Car
P.S. correct Base psoition is 45.768411112 15.963511511 159.0149
Hi Darko,
I agree it can be handy. We’ll think about adding this option to Emlid Studio 
I’ll try to process your logs and write back. I believe we’ll find out what’s going on.
Hi Darko,
As I understand, the correct base position you shared is the position of the base’s antenna. I’ve processed your data in Emlid Studio using it and got 100% Fix:
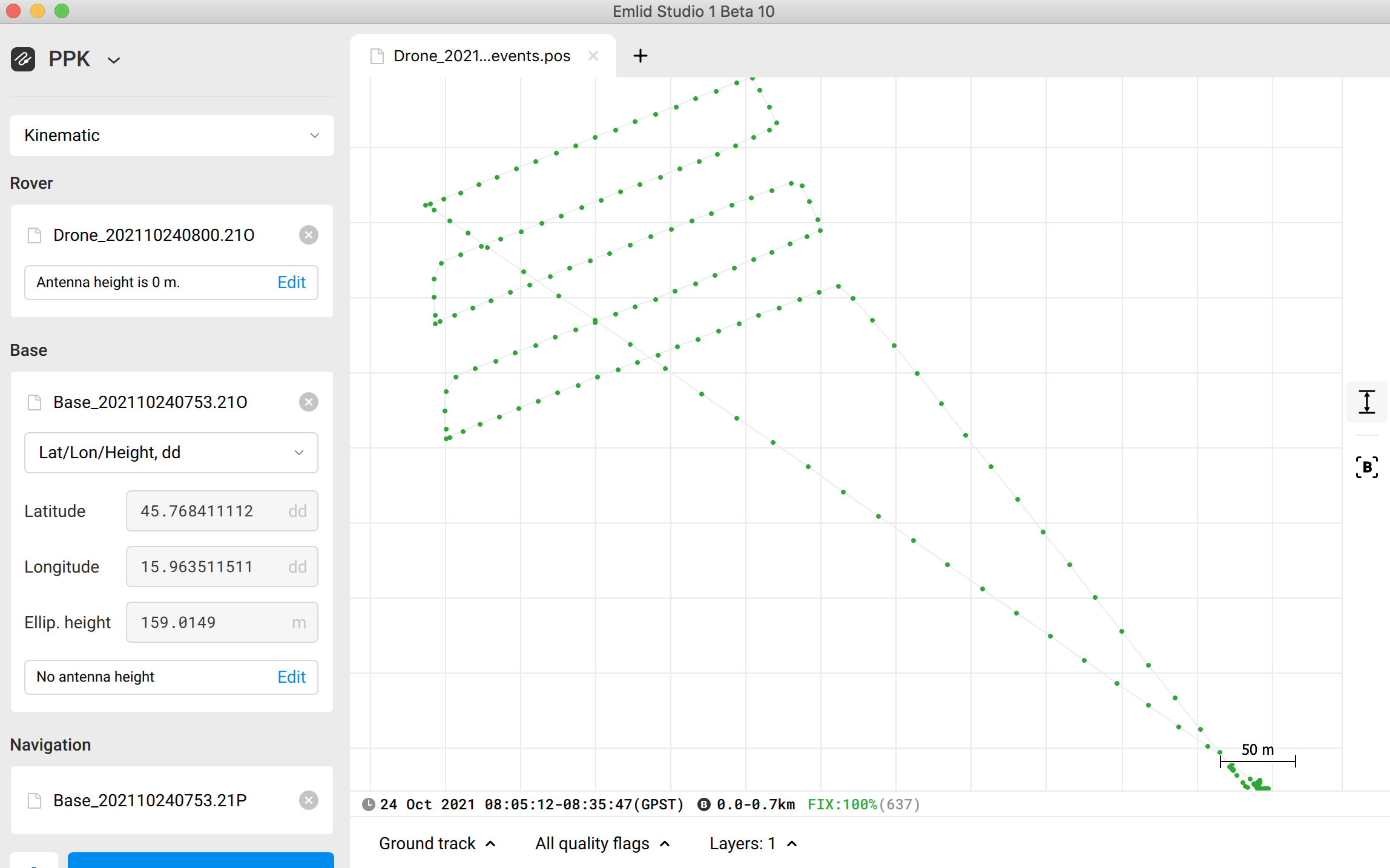
You can download this file to check it: Drone_202110240800_events.pos (88.4 KB)
Have you used the default settings and Emlid Studio Beta 10? Do you use Windows or macOS?
3 Likes
Hello Ksenija,
I’ve made a mistake again and didn’t take the screeshoot of my setup before reseting it to the default values. You are right, I must have been “Wise Guy” that has played with the setup too much and done something I couldn’t reproduce again.
Anyway, it’s working perfectly now.
Thank’s a lot and sorry for my mistake.
Best regards,
Darko Car
1 Like
Hi Darko,
No worries! The most important thing is that everything works now
Hi Kseniia,
Problems again. Now I have done everything with the default settings, just as you suggested. Couldn’t get any results and finally I have calculated it with the RTKLib. The problem is that when I want to use my state VRS data my navigation files are separated for each sattelite type in the separate file and Emlid Studio allows me to load only one. So for the Navigation file I’ve used Rover_Hydro_raw which is my RS2 receiver.
As you can see I’ve done the calculation for the Base position with the Emlid Studio in Static mode and that result is fine. Later I’ve used that calculated position as the Base (Rover_Hydro_raw) position for my Drone PPK calculation but all the results were FLOAT. I’ve tried to play a bit with the settings but nothing changed the results remain FLOAT.
Can you, please, inspect that. The link remains the same.
https://drive.google.com/drive/folders/1ft6CRegvN1DZLL0P0xp1NybFR-cUCB6y?usp=sharing
Best regards,
Darko Car
Hi Darko,
Sure, I’ll check it!
Darko,
Please tell me more about the VRS data so that I understand your setup better. Where you’ve downloaded the logs from? Is it a physical reference station or a virtual base? What’s the distance between this base and your Reach RS2?
Hi Kseniia,
Logs were downloaded from the State VRS system called CROPOS. That is the Trimble VRS network and my base was virtual maybe couple of meteres from my take off/ landing site. The base receiver was there too. The distance was about 50m between Virtual Base and my RS2.
1 Like
Hi Darko,
The problem is that when I want to use my state VRS data my navigation files are separated for each sattelite type in the separate file and Emlid Studio allows me to load only one.
It’s indeed a relatively common situation that there can be several NAV files for the base. We’re going to support it in Emlid Studio in the future.
As I see from your rover’s log, the SNR level changed periodically for some satellites:
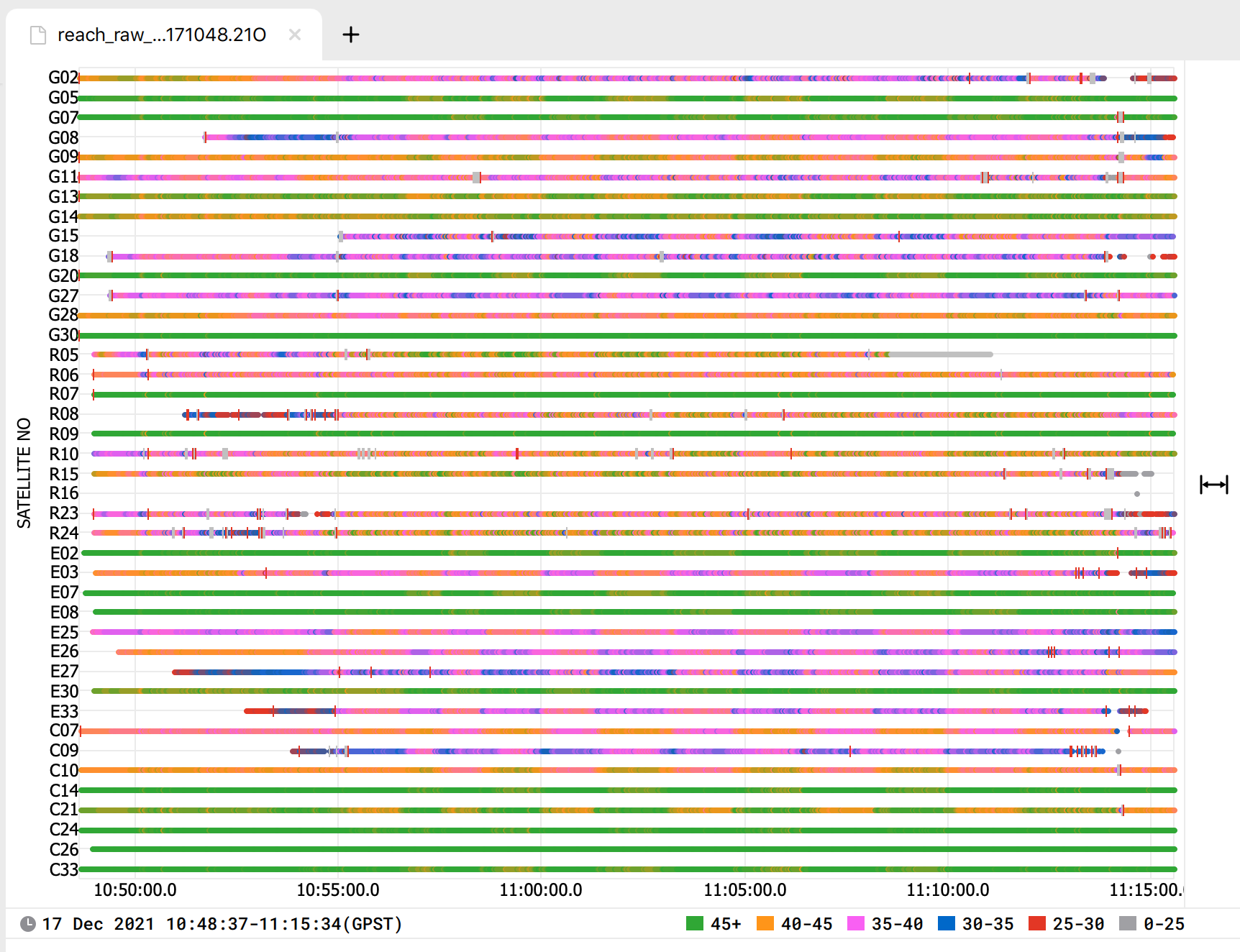
Usually, it happens if RF noise from some other electronics installed on the drone affects satellite signal reception. Most likely, that’s the reason why you can get only the Float solution. Can you share a photo of your drone setup?
2 Likes

Try wrapping the M2 in alu foil.
1 Like
Hi Darko,
Thanks, you too!
I agree with Christian: it’s better to add additional isolation for Reach. It’ll protect the unit from RF noise produced by wires and electronic components.
Also, I’d recommend placing the antenna higher. You can check an example of antenna placement in our guide.
1 Like
Hello Kseniia,
Thanks for your advice. I’ll try to wrapp it up in the alu foil first as Christian said. Right now my antenna is placed 15cm above the top plate of the drone. To be honest, it is just couple of cm above the battery. I hope it is not producing any noise. The M2 is very close to the RFD 868 data link and 2.4Ghz RC/data/video. If I must place it higher I’ll have a problem with the cable length.
Best regards,
Darko
Surprisingly, batteries can produce some strong emf. Especially LiIon, which you’re are not. But just the same, get that antenna up up and away from that battery : ) Your M2 may not have to deal with the esc’s as they’re mounted on the arms, but there’s the power distribution, radio, autopilot
… Well, everything mounted between those plates can be assumed bad for your M2. Here’s a picture of mine, maybe a little extreme as I’ve got a .37m antenna offset lol. You might want to ditch those monopole antennas as well. Without a ground plane, they don’t operate very well. One dipole or two with one spaced around 20cm or more would give you a huge range advantage. I wouldn’t mess with polarity diversity unless you’re drone racing. Keep the polarity of the two antennas the same as your ground station.
Hi Darko,
I’ll try to wrapp it up in the alu foil first as Christian said.
Good! I think it can help.
It’s hard to say how much the electronics affect the antenna, so I’d recommend keeping it on a higher pole anyway. You can also think about adding a ground plane. It helps protect the antenna from radio waves coming from below. Helical antennas can work without ground planes, but adding them can improve data quality.
What size would you recommend?
I did a test a ground test with a helical antenna mounted with a 15 cm diameter ground plane. I had slightly less multipath (which is usually not an issue on a drone) and insignificant (almost statistically insignificant) max SNR increase of ~1dBHz.
The ground place was setup under the helical antenna resting on the sma connector.
If the helical was born and designed with the ground plane, it would likely be much more effective. However, as an aftermarket addition, I wouldn’t recommend it. Not worth the effort, not the materials.
Careful attention to shielding (like the M2 itself) on the rest of the platform will be much more fruitful.
Hi Shaun,
We usually recommend at least 70x70 mm ground planes for patch antennas. With a helical antenna, you normally won’t need a ground plane at all. I agree with Christian that shielding is the first thing to pay attention to in this case.