



All,
My plan is to build an autonomous quadcopter drone.
- Name: Autonomous Drone Build v1.0
- Was sick a few weeks ago and had a dream about drones. I am a software engineer (Java, PHP, JavaScript, and more) and always wanted to integrate my knowledge and skill as a developer with hardware. A drone sounds like a pretty good project. I am from New Hampshire. I’m interested in practical applications of the drone in agriculture and more!
- Project Steps: Research, research, buy the parts, put the parts together, then do some test flights.
- Main components:
-
CanaKit Raspberry Pi 3 B+ (B Plus) Complete Starter Kit (16 GB Edition, Premium Clear Case)

-
Navio2 & Addons
-
1 x MCX GPS/Glonass antenna (ANT102)

-
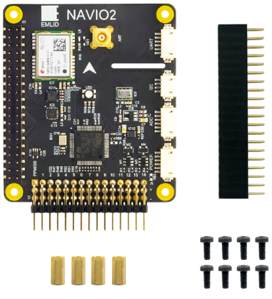
1 x Navio2 board (NAV104)
-
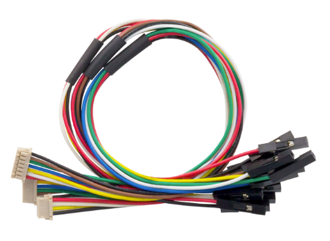
1 x DF13 wires for Navio2 (WRP103)
-
1 x Power module DF13 (PWR103)

-
1 x MCX GPS/Glonass antenna (ANT102)
-
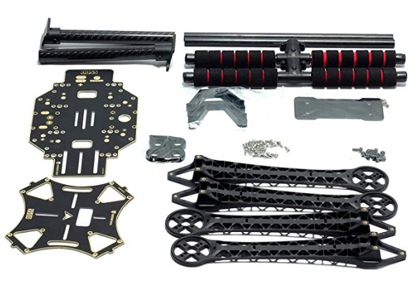
Readytosky S500 Quadcopter Frame Stretch X FPV Drone Frame Kit PCB Version with Carbon Fiber Landing Gear
-
LHI 4x 2212 920KV Brushless Motor (CW / CCW) + 4x SIMONK 30A ESC For DJI Phantom

-
RAYCorp® 1045 10x4.5 Propellers. 8 Pieces(4 CW, 4 CCW) Black & Red High Quality 10-inch Quadcopter and Multirotors Props + Battery strap

- Photos and Videos:
My constructed frame and the CanaKit still in boxes

Received my Navio2 autopilot like 2 weeks early! Here is picture of the Emlid Navio2 mounted on RPi 3 B+ board:

6. Documentation and building process:
- Assemble frame
- Assemble autopilot (flight controller) and Raspberry Pi B+ HOWTO Docs
- Flash Emlid Linux image to MicroSD card
- Connect to internet and update operating system
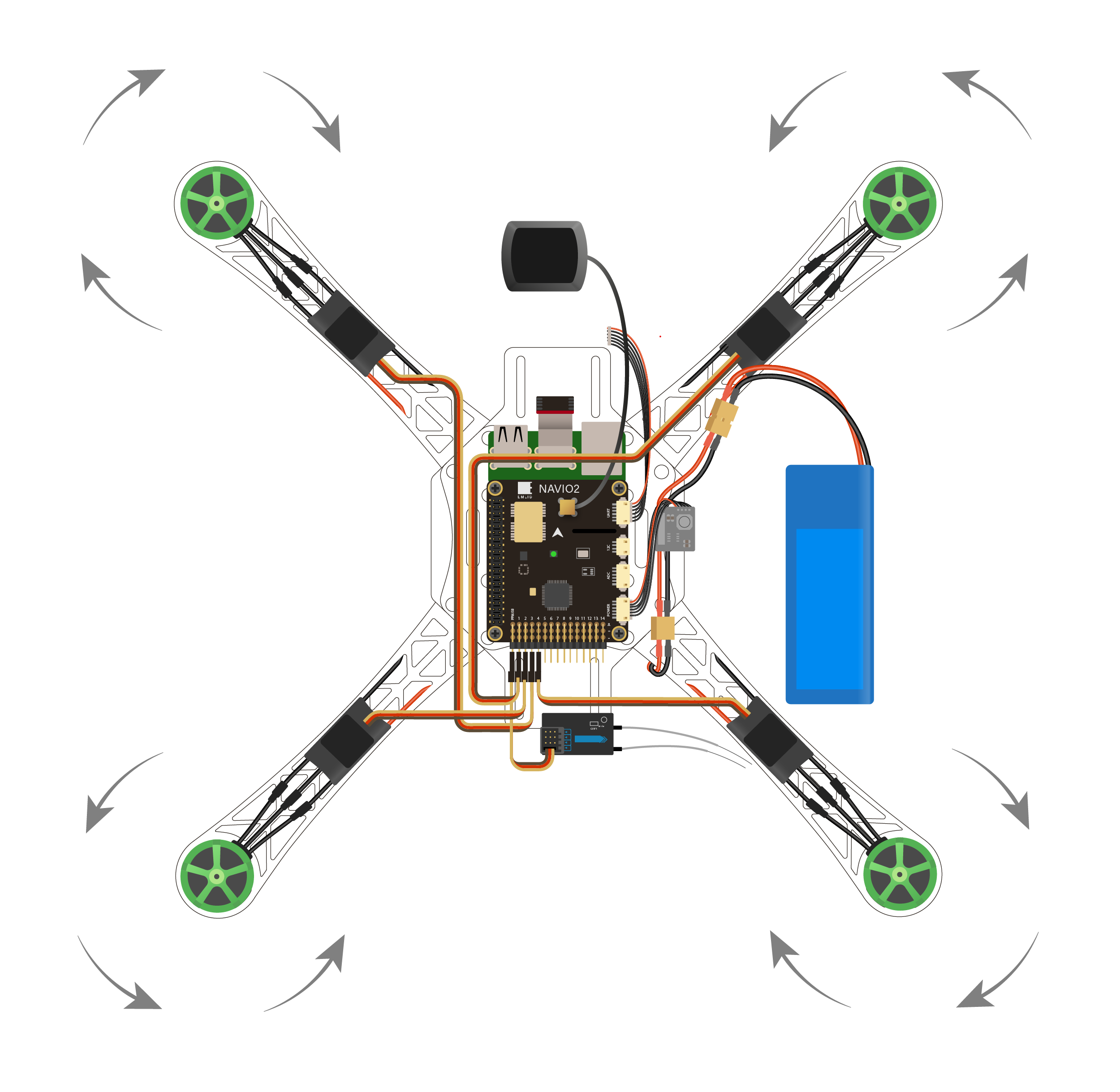
- Connect brushless motors to frame
- My quadcopter setup Emlid Docs
-
ArduPilot documentation
-
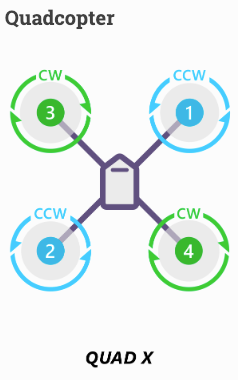
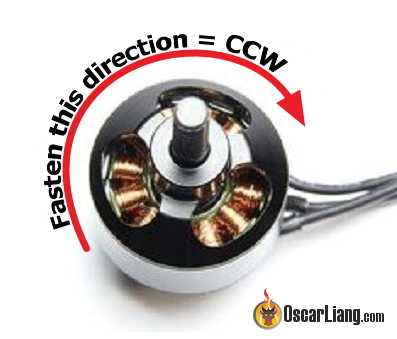
HELPFUL TIP - I am a novice at this. So my 4 motors (2 x CCW [Counter Clockwise], 2x CW [Clockwise]) came and I needed to place them appropriately. I found that with my motors (and I guess many other model motors) can be made to rotate CCW or CW… it just depends on the position of the ESC wires that are connected to the motor. The GOTCHA is that you want the nuts on the motors to be “self tightening” (ie. as the blade spins… the nut is forced in the opposite and tightening direction). But how do I tell?? This site has a really good explanation: CW & CCW MOTORS – THREAD DIRECTION AND PROP NUT

_ Mr. Mark


 . Just a little bummed because I’ve got to wait a while.
. Just a little bummed because I’ve got to wait a while.
