Thank you for providing such detailed descriptions. We studied your log files and we really can’t see the reason for the difference that you are seeing. It is a very interesting case and we want to study it more to understand what is actually happening.
How Reach handles offsets
I understand the hypothesis about the misconfiguration of M2 as RS2, but it is not the case. Reach does not add any offsets internally. All Reach receivers output position at phase center, without any vertical offsets. Vertical phase center offset is only taken into account in Survey projects, not for status or position outputs or logs.
This is very easy to verify by conducting a zero-baseline experiment. You can connect Correction output of Reach M2 to Correction input of the same Reach M2. If there was any kind of offset added, you would be seeing that.
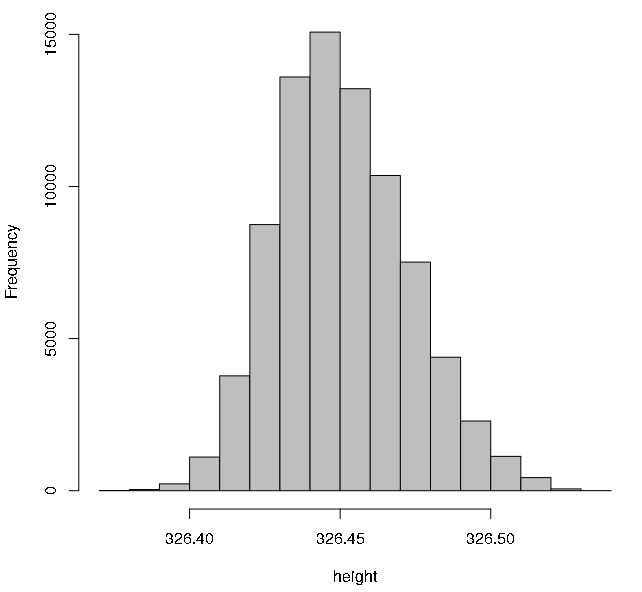
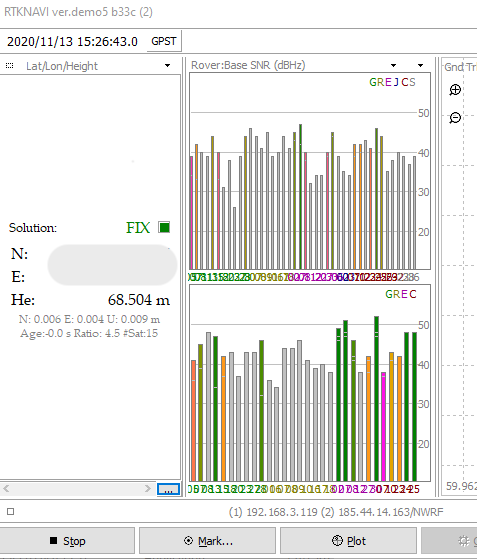
We also tried to imitate the setup that you have and conducted an additional experiment just to double check. We verified that ReachView and RTKNAVI results match with our NTRIP provider.
In normal operation the expected result is benchmark height + LEIAX1202GG, so about 63mm higher than the benchmark. While what you are observing is a shift of about 14-15cm. So there must be something that account for extra ~80mm of vertical shift. Having taken the rover height into account we should look at the base station offsets.
Reach assumes that base station position received in RTCM3 stream is at the phase center, which in our experience is the norm with the correction providers that we encountered. So Reach assumes null antenna for base and for rover.
Leica AR10 antenna vertical offset is about 88mm. And if this antenna is specified during post-processing the height seems to match. What is interesting here is the reply that you got from the network operator:
So this makes total sense and it is exactly what Reach expects from a base station. But why do the heights in the RINEX file and RTCM3 match? If RINEX height requires the application of antenna model and RTCM3 height is for null antenna, then how could they be the same? I would expect to see a difference of about 88mm between the two for Leica AR10 antenna.
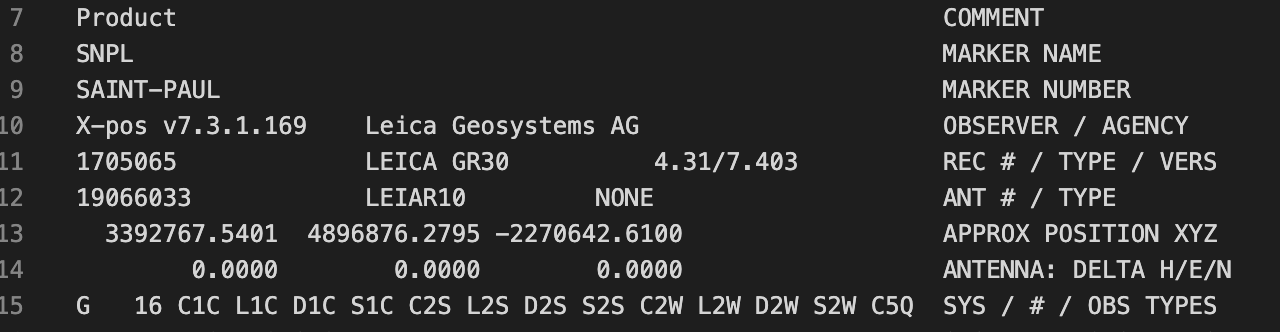
Here is what we got by transforming ECEF from the RINEX of your base to LLH to get ellipsoidal height.
XYZ:
LLH:
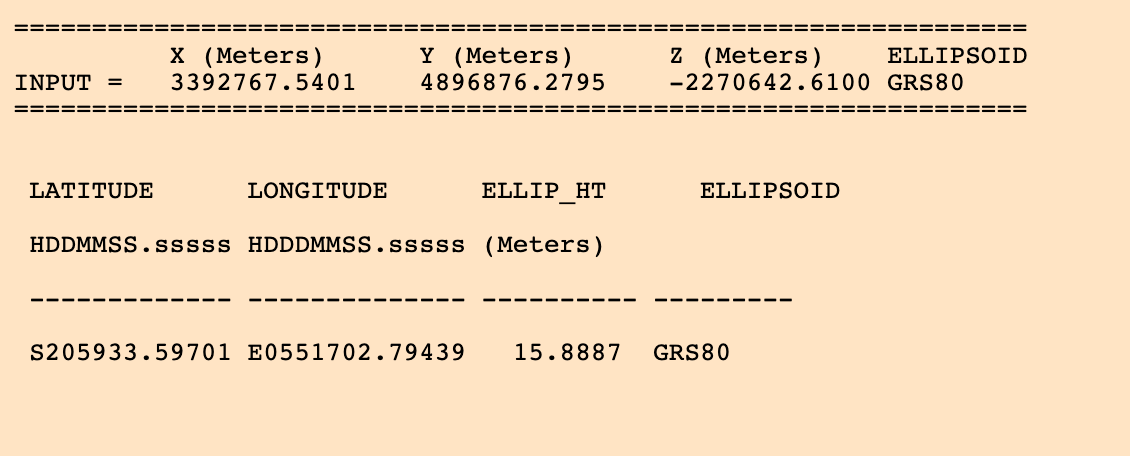
Which makes the SNPL RINEX height 15.888 m, this must be the ARP height as extra 88mm for Leica AR10 is applied with the antenna model during processing.
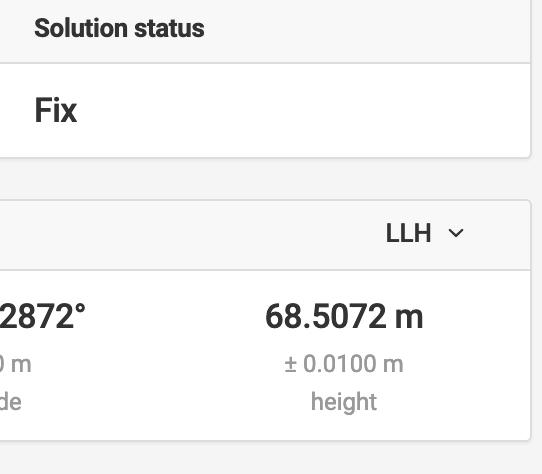
What we see in RTCM3 messages is the same 15.888 m, which are also visible on your screenshots of ReachView interface.
At this point I think that these steps could give us more info about what is going on:
- Could you please confirm with the operator of your network why do the two heights match?
- Could you please record a raw log with “raw data debug” option set? (you can enable it in the settings, which are marked with a gear shaped button). Please also provide a matching RTCM3 log.