I’m on my way to build my first Quad based on the Q450 frame. I plan to use it to support a HD camera in addition to the camera Pi for FPV in flight.
I think I pretty much think of everything and I based on several posts to assemble this setup but But as I’m not sure that everything is optimized, I’d rather that experts around give their opinion on my build.
… and of Course a Navio 2 with Power Module and GPS/GNSS antenna MCX
I plan to control my drone through a local network and if their is too much latency, I will look for the Turnigy 9X 9Ch Transmitter w/ Module & 8ch Receiver (Mode 2)
I would try to find some motors with a little bit more power. The SK3s you listed have only 96W, 10A.
That is not much. Given the fact that you plan to fly with a 5000mAh lipo, hd cam, raspi/navio combo, the copter will be on the heavy side for its size. With 10" props you will already be over the motors power rating at full throttle.
With props smaller than 10" it will have almost no useable payload.
I would plan to buy an RC transmitter right away. Depending on where you life, it is not allowed to fly without dedicated rc control. Many tasks are much easier to do with an RC transmitter, like calibrating the ESCs, initial flight testing/tuning etc.
Standard wifi has a limited range, limited realtime capabilities and is prone to interference. Of course you can use GCS failsafe and have the copter land or RTL in case of a wifi interruption, but you would have to test this and without a seperate control channel, the first test could be the last.
The Turnigy 9x receiver has no CPPM/S.BUS output, so you would need an CPPM encoder to connect it to the Navio 2.
I hope this helps, good luck with your build,
Thank you ! What are your suggestions un terms of motor and props for optimizing this build ?? Do I have to change the battery ?
If you do not have any reference that comes to you, what specs do you recommend ? Of course if you could recommend references of motor and props ans also battery advices as example it’s perfect
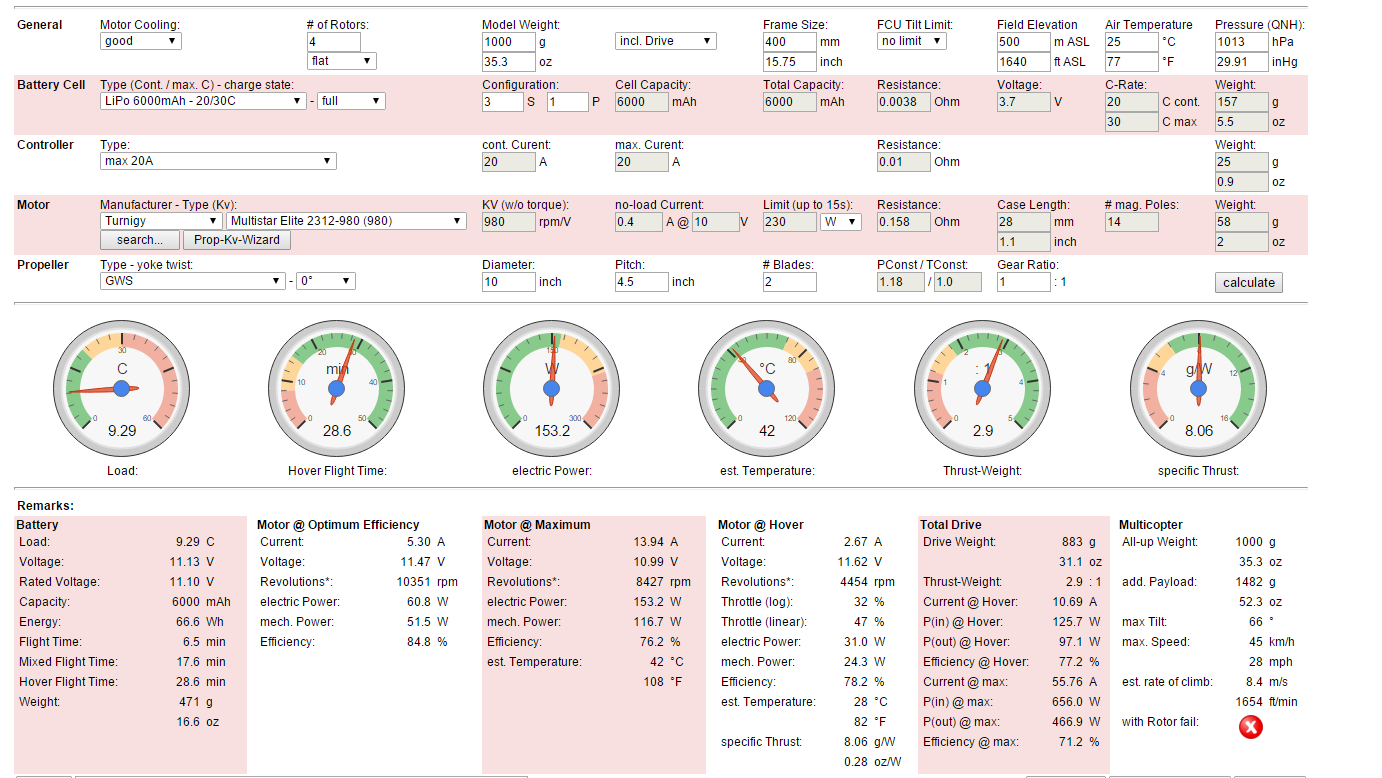
@P3G , ecalc will answer all these questions and give you a better foundation from which to build your quad. Give it a shot, and report back your results
@P3G , I just added up the weight of your frame, a 5000mah lipo, and 4 of the motors (@58g each) and got 915g, so I think you should redo your model weight. make sure to add everything in there, autopilot, props, radios, esc’s, motors, frame, antennas, etc. Then add a few more grams for fasteners, velcro straps, etc. This should get you closer to the correct AUW. You may find 980KV motors with 10/4.5 props is not sufficent when you get the correct AUW…
You want to achieve hover with no more than 75% throttle, and this is really pushing it. An aircraft with hover closer to 50% throttle will perform much better in adverse conditions.
@Aquila If I add up everything including miscellaneous I obtain a weight of 1310 gr. Do you recommend to change the motors (so maybe ESC too) and props ?
I’m really lost now !
@schuermannsebastian thank you, I will choose the props model once the motor is definitvely validated in order to choose selftightening or not.
I want a drone for FPV aerial explorer (with also a small HD camera for recording). I do not understand everything yet… sorry !
Do you have any recommendation in terms of motors / ESC / Props ?
@P3G The motors as such are good, but if you have no other mounting option than selftightening props, you will be very limited in your choice of props.
The selftightening props are also more expensive than those without nut. Even if you find seperate nuts in cw/ccw the shaft will be to short to fix a standard prop.
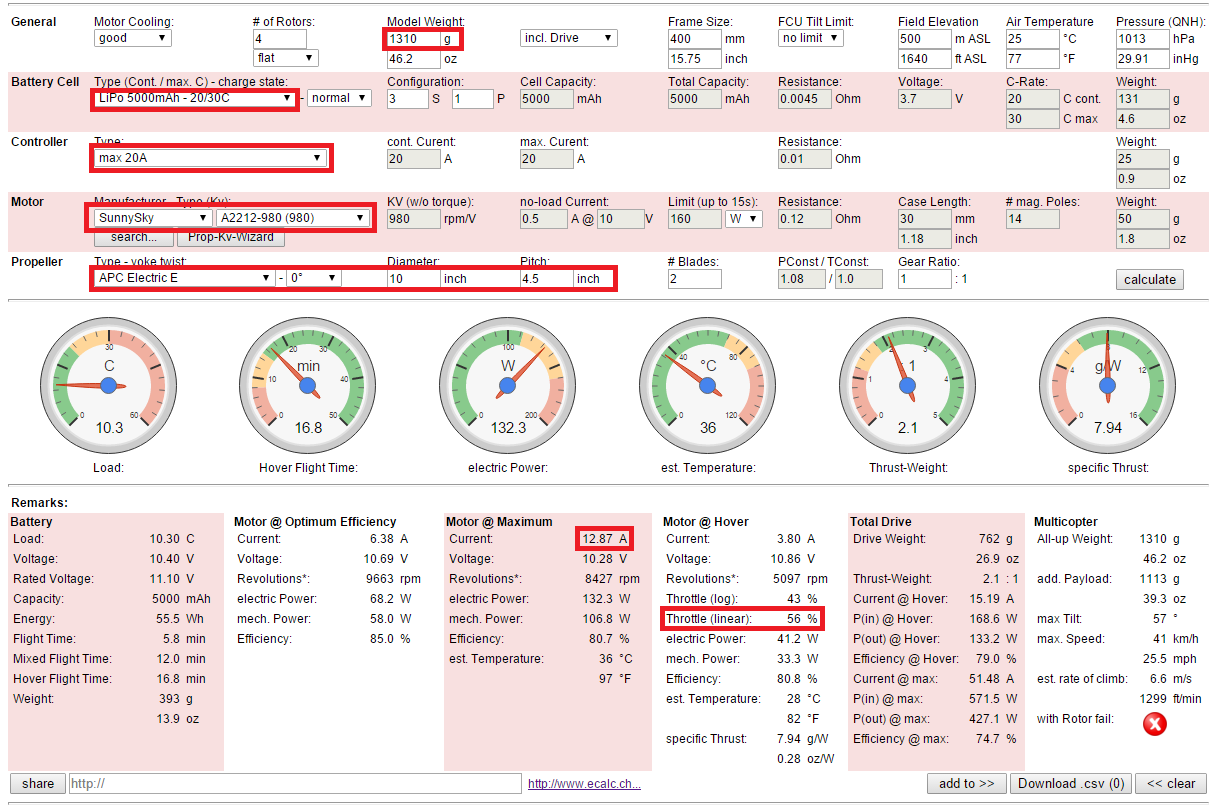
I based this off of your AUW, and used sunny sky 2212-13 980kv motors, 10 x 4.5 APC electric props, 5Kmah 3s, 20a esc’s.
With a 1310g weight, 20a esc’s have plenty of overhead and the hover is a little high, but OK. Now you need to add your payload in and see if the numbers are still good.
@aquila I’m really sorry but I don’t understand what Payload means in the context of ecalc as I can’t see any field relative to, I only see Model Weight. FYI, I Add up every items I want on the drone for the model weight, wich is 1310 gr :
Frame : 270 gr
Battery : 414 gr
Motors : 240 gr
ESC : 112 gr
Props : 30 gr
HD Camera (Xiaomi Yi) : 73 gr
HD camera Mount : 30 gr
Raspberri Pi 2 : 43 gr
Navio 2 : 14 gr
Misc : 80 gr
I have selected the Q Brain ESC with 20A but they exist also with 25A or I Can take 4 Afro ESC with 25 A if 20A is not enough.
SunnySky looks great, what do you think also about the Motor I found above ?
No need to apologize at all! I will help you clarify anything you are unclear on. But I won’t do anymore calculations for you , you have to do those yourself.
Payload is not a field in ecalc. It is merely the equipment you will add to your aircraft that is not essential for flight. Things like extra lipos for video equipment, fpv camera, video transmitter, etc. This is your payload.
So what I meant was add up the weight of your payload and add this to the model weight. The extra weight of your payload might make flight time to low or put you outside the usable throttle range.
It looks like your list above needs a few things added to it. Such as radios. your main receiver for manual control, some sort of radio & antenna for telemetry with the aircraft, such as 3DR telem modem, or a RFD900 modem, or a 2.4ghz wifi dongle, etc. Also some sort of video transmitter & antenna if you want to do FPV.
Add in the extra equipment and redo your ecalc. If it does not look good. Try different motor/prop combos to achieve the results you want.
I subscribed for a paid subscription on eCalc and I tested a large number of possible combination of engine / propellers / ESC / Battery. I think I found a balanced combination with RCTimer SL2212-920, 11x4.7 props, 5000mAh 20/30C Battery and 30A ESC :