Detailed problem description. How does observed behavior differ from the expected one?
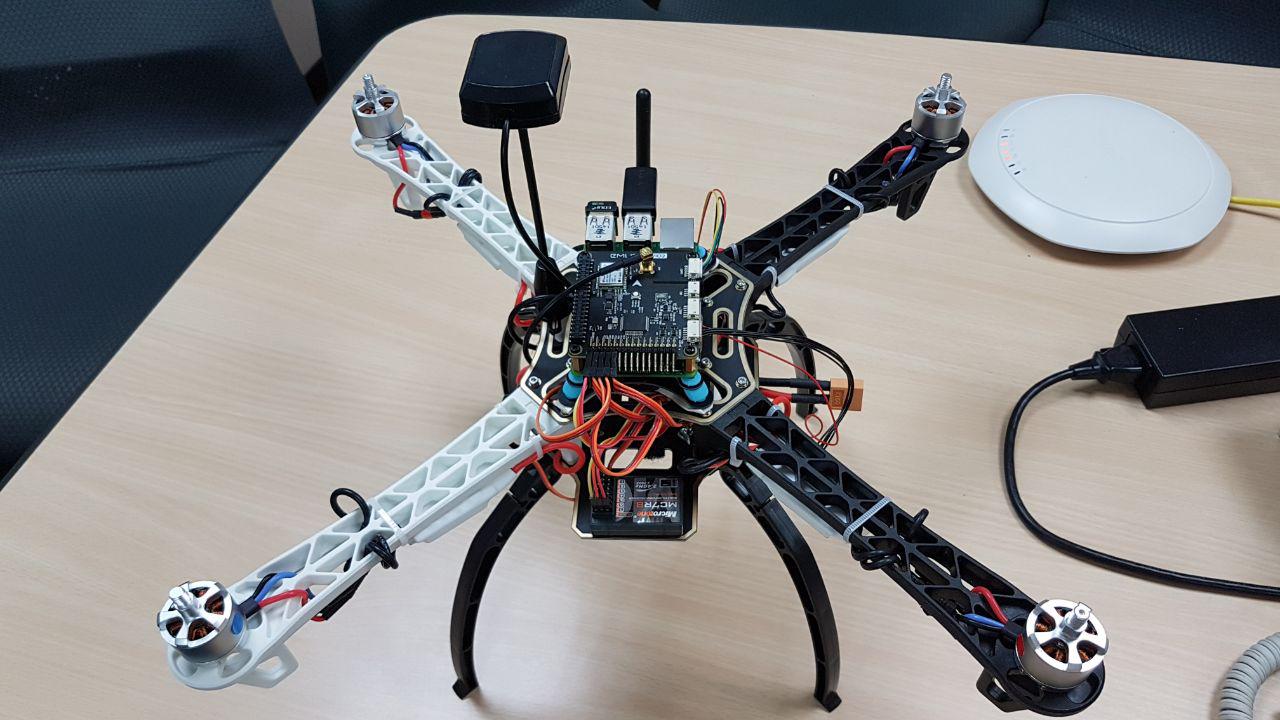
We’ve done frame class and type configuration, compass calibration
,radio control calibration in mission planner, accelerometer calibration in mission planner, and rc transmitter flight mode configuration.
We tried three different methods to calibrate ESCs as follow.
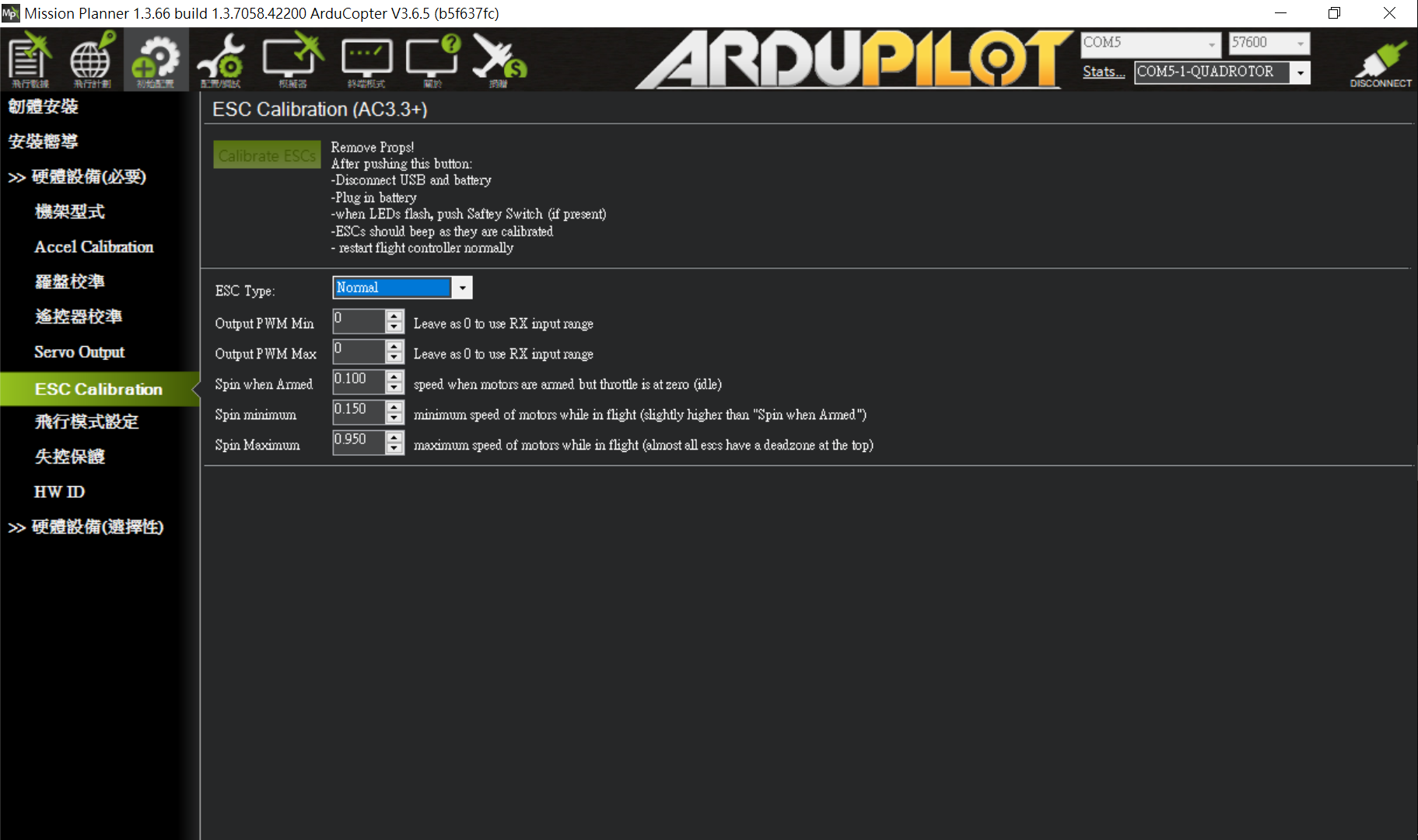
a.I tried the “Calibrate ESCs” in mission planner.
After pressing the button “Calibrate ESCs” in mission planner, ESCs not beeped at first ,and after few seconds ESCs kept beeping unless I disconnect the battery.
b.I tried the " All at once calibration" from http://ardupilot.org/copter/docs/esc-calibration.html
But my ESCs didn’t emit the musical tone and the 3 of beeps and then an additional two beeps.
I raise the throttle and they didn’t spin.
c.I tried the " Manual ESC-by-ESC Calibration" from http://ardupilot.org/copter/docs/esc-calibration.html
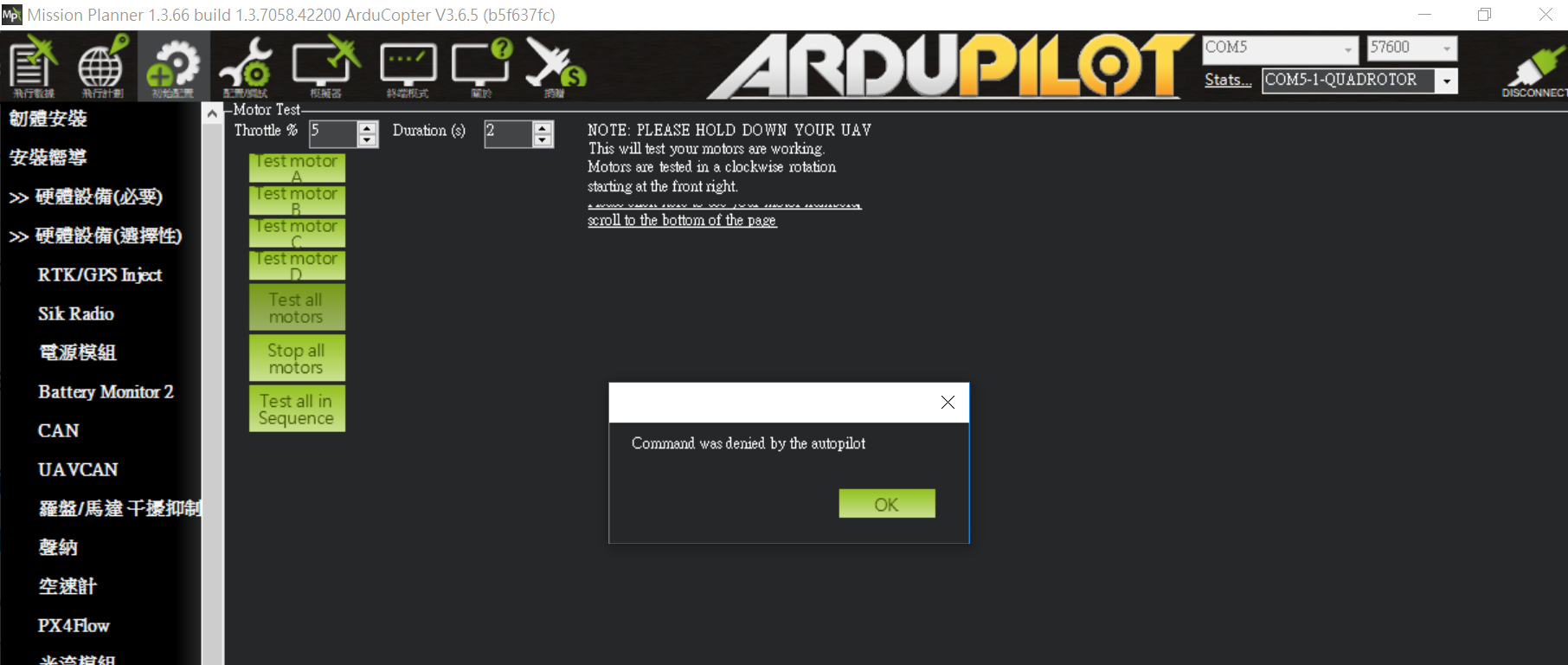
It worked. But when I pluged ESC cables back to navio2, I can’t test motors.
Please help.
Your step by step actions.
a.
-Pushing the button.
-Disconnect battery.
-Plug in battery
-ESCs not beep twice 578560207.402310.mp4 - Google Drive
-ESCs keep beeping 578560206.928196.mp4 - Google Drive
b.
-Turn on transmitter and put the throttle stick at maximum.
-Connect the Lipo battery
-With the transmitter throttle stick still high, disconnect and reconnect the battery.
-ESCs didn’t emit tone like manual
c.
I pluged ESC cables back to navio2, I can’t test motors or control it via rc controller.
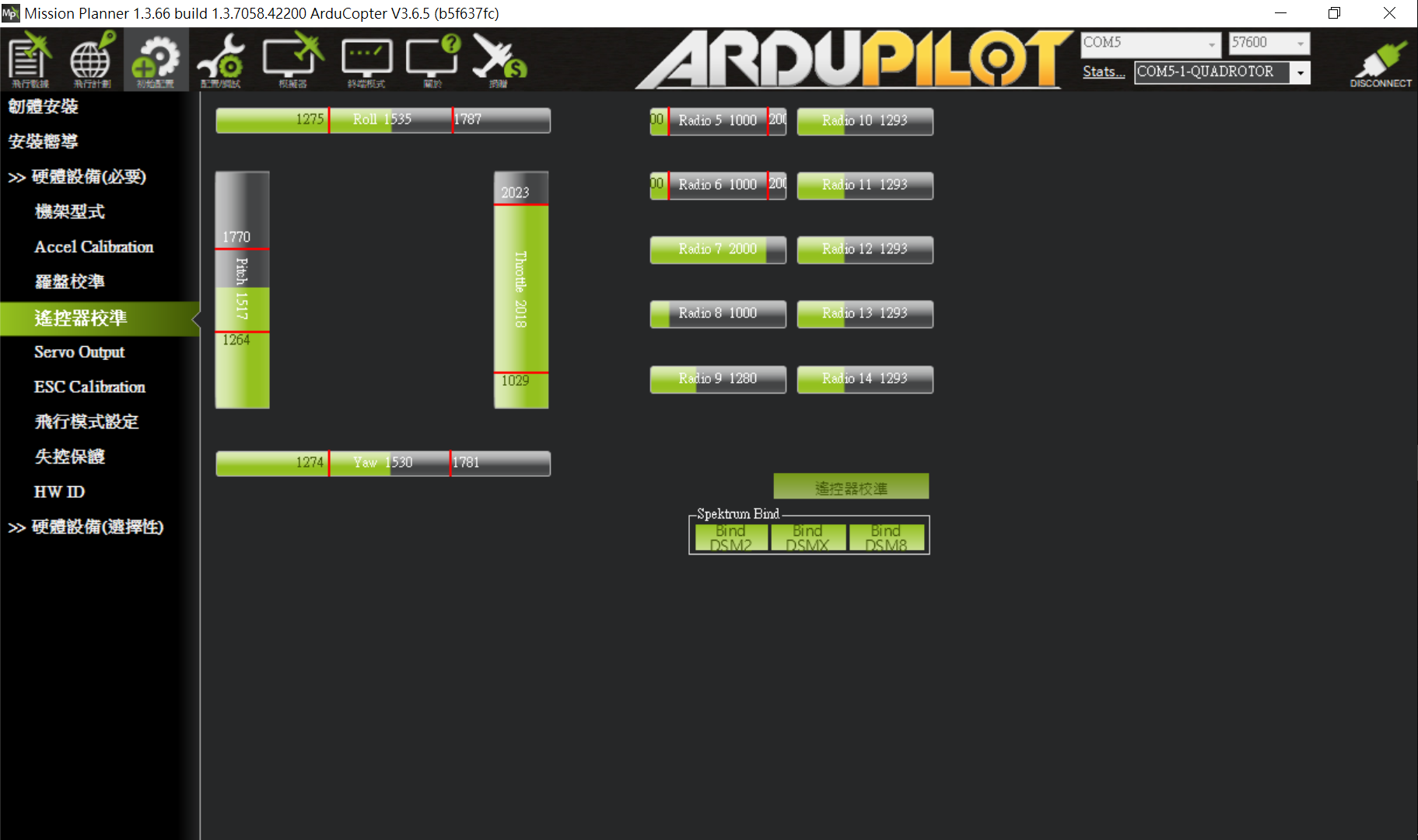
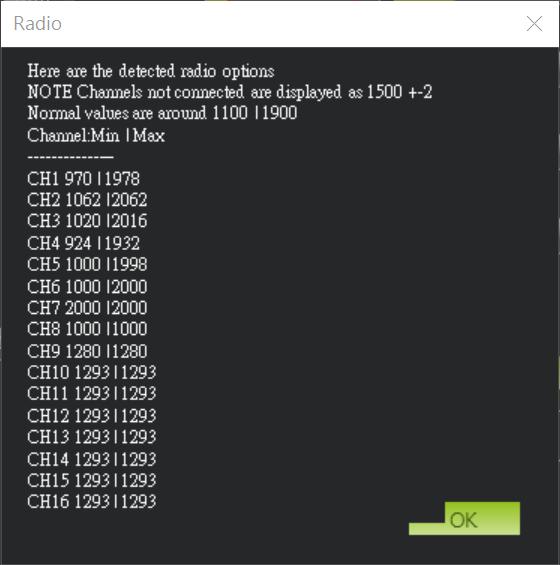
Looking at the MP screen copies, Radio settings are out of range for channels 1,2 and 4. So if ESC calibration is well done with direct esc connect to Rx, it is not possible to arm motors with 1274-1781 channel 4 range.
Hi,
I can go manual ESCs calibration one by one,but after that motor test failed.
The error is “Command was denied by the ardupilot.”
And I can’t make the motor spin via rc controller either.
The problem is that my radio controller is not compatible with MissionPlaner? Should I buy a new RC hardware?Or I just do radio controller calibration wrong?
It is indicated in the Mission Planner RC calibration screen. Below 1100 and over 1900.
You have to adjust endpoints of your RC Tx (as you did for channel 3) and redo the Mission planner RC calibration. If you use the channel 3 Tx endpoints setting for channels 1,2 and 4, you are in the expected range.
My RC Tx can’t expand the bandwidth to below 1100 and over 1900. For example,It was 1275~1787 at first ,I only can move it to 1190~1702 or 13xx~1900.
I’ll buy another RC Tx and try again.
But the ESCs still can’t be calibrated and keep beeping.
I tried to calibrate in MP, the message dialog said “Set param error”.
My AC version is 3.6.5.
I also tried Manual ESC-by-ESC Calibration.After finished the calibration,I can’t test my motors so I think the calibration was failed.
Did you reset settings to default after updating to the current image version?
Note, that after resetting you’ll need to calibrate everything from scratch.
Hi @tatiana.andreeva
Is there a suitable version for RPi 2B ? My version on MP of arducopter is 3.6.5.
If I check the version of arducopter directly by "sudo emildtool ardupilot ", It only showed “3.6”. How can I know that the version of MP and Navio2 are the same?