sudo nano /etc/rc.local (this edits the rc.local file)
Add the following command to the rc.local file:
sudo nohup ArduCopter-quad -A udp:192.168.1.2:14550 -C /dev/ttyAMA0 > /home/pi/startup_log &
But change the IP address to the IP address of the computer you’re using to connect to the RPi. This will enable connection from a GCS, using UDP and the UART port when using a 433 Link etc.
Then open up Mission Planner, using the connection options, select UDP and connect.
If using a 433 link, select the Com port you have configured, and 57600 Baud.
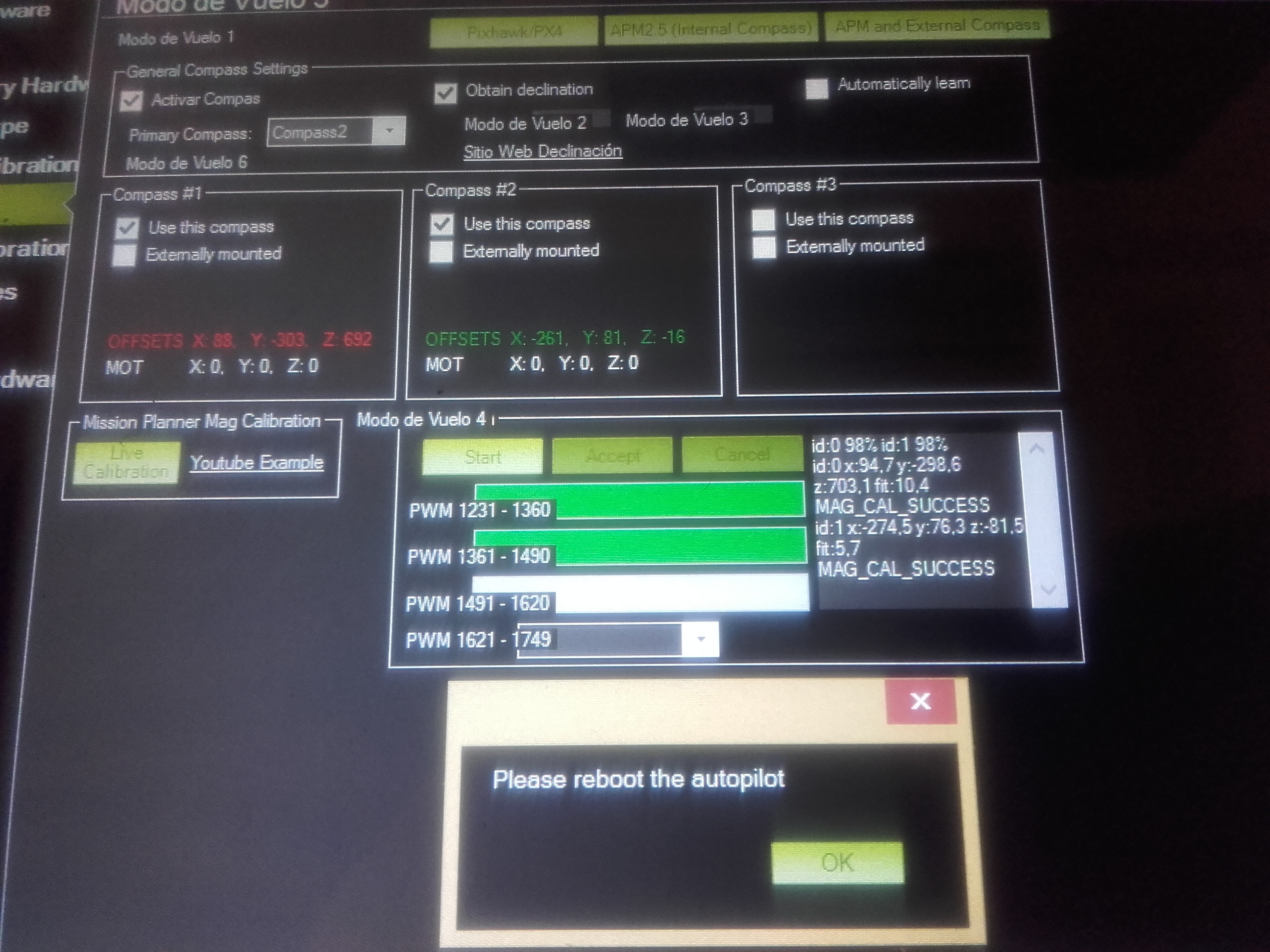
I tried with some android app and every time the compass calibration end with a message “not enough data”. Is there a way to calibrate the compass without the apmplanner ? I managed to do all other calibration (radio and accelerometer).
What is the best method to calibrate the compass (i have seen a lot of different method on youtube but i can’t get enough data)? What is the magnetometer i2c address ?
I’m about to give up. I tried with 3 mission planner (android, linux, and windows) and the live calibration just doesn’t work. I have got a message : “Not enough data points to calibrate the compass”
I got those error code on the live calibration window :
compass 1 error
compass 2 error
compass 3 error.
The planner doesn’t get any data point… I think that the compass is dead…
What can i do now ?
I put 0 in the arming check (in the advanced param list). I configured the Alt hold accro and stailize modes…
But i think that get a +160€ flight controller that runs on a cortex A processor and be stuck with accro and stabilize is just so dissapointing… An atmega 328p could have do the job
i didnt notice you’ve got a Navio+ - the statement for navio+ was correct and should be correct in the future again; i believe it’s just a software issue for current releases;
but yeah - it’s kinda misleading at the moment;
report if you’re succesful
are you using the beta image?
have you tried the other image as well to rule out any beta image with navio+ issues? ( i am not very familiar with the new beta image)




{kind=link}