



I feel better about our CAD rectification process a little more every day. Imagine what others that aren’t quite as sharp as Joe are dealing with… This is how drones end up in the trash.
1 Like
Lol, disregard what I said, I’m getting confused by you guys’ switch between fractional and decimal imperial and metric measurements. I thought he was still about 9" off in flight but 2" off on the ground.
I’m not sure what is which either. I’m looking forward to a data set with no transformations in order to try to establish a baseline.
1 Like
I guess I have no idea what I’m doing with this drone, this shouldn’t be that hard to do. I have no problems with my m300 and my workflow and 95% of the time I’m under a 1/10.
I setup a project in the Reach app WGS 84 converted my ground control to the same and went and shot them again to verify. Use that to setup my base on a known point, output of the base pointed to emlid caster, pointed the controller for the drone to the rover mount point, got a fix, flew the mission. long, lat, and elevation still off.
This is the first time I’ve flown this way usually everything is in state plane so may not have set something up correctly.
Pix4d has basically blow me off closing the ticket and Autel never responded.
At this point I’m open to any and all suggestions…lighting it on fire and see how long it would fly for might be fun.
Hey Joe. A user on another forum posted poor results with the Evo2 RTK and he is also using Pix4D for processing. I suspect that Pix currently has a problem with the Autel craft.
A reminder that if you post up a simple dataset, I can run it through Metashape. I get similar results with a P4RTK and the Evo2RTK.
1 Like
Simply the struggles of fighting monopolies.
Someone here got an Alta X that I unboxed last week and when I saw a TBS radio receiver, PX4 FC, and other off the shelf components, I was all giddy that they’d be able to use this with full control over every aspect of the drone and mission planning.
Hey Dave,
I have a small site I flew I can upload. Probably be tomorrow. What forum it might have been me
It was on AutelPilots. This person was comparing it to an M3E not an M300.
OK, so I changed a couple of setting in Pix4d and it made a significate difference in accuracy.
Still not survey grade, for us .1 ft, but better.
No changes in pix4d other than the setting the image properties to ellipsoid.
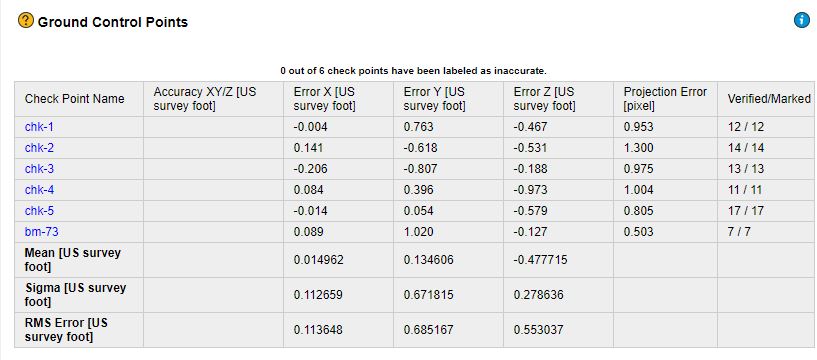
Changed the calibration method in step 1 to
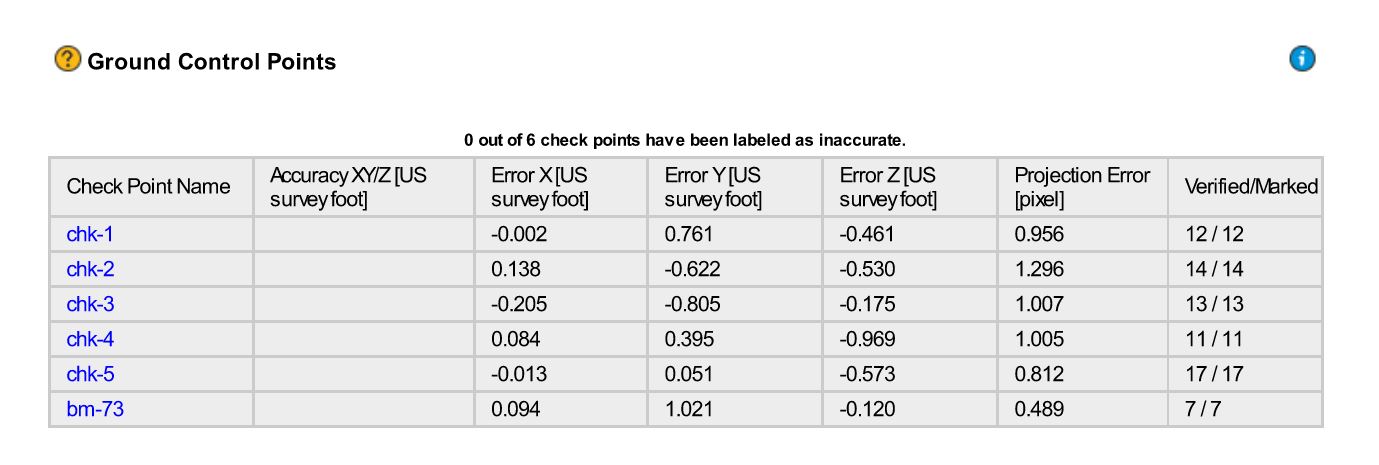
Shutter Model
The biggest difference was the shutter model but I did have the calibration method set when I processed that but still that seemed to make a significate change.
I think Pix and Autel need to get together and figure this out.
And thanks to Dave and Michael for taking the time to run this through their process, much appreciated.
2 Likes
Way to stick with it! Let’s contact some of our Autel folks and will copy you and Dave.
That is sub 5cm in z, so you are pretty good. I would run it with 1 point set as GCP and see what that does to your z error on the remaining points.
1 Like
That’s in feet. Need to be as close to .1 ft as possible…even if I have to use the check points in the processing as GCP.
Michael, would greatly appreciate any Autel contact you have. I haven’t had any luck going through their support so far.
Thanks
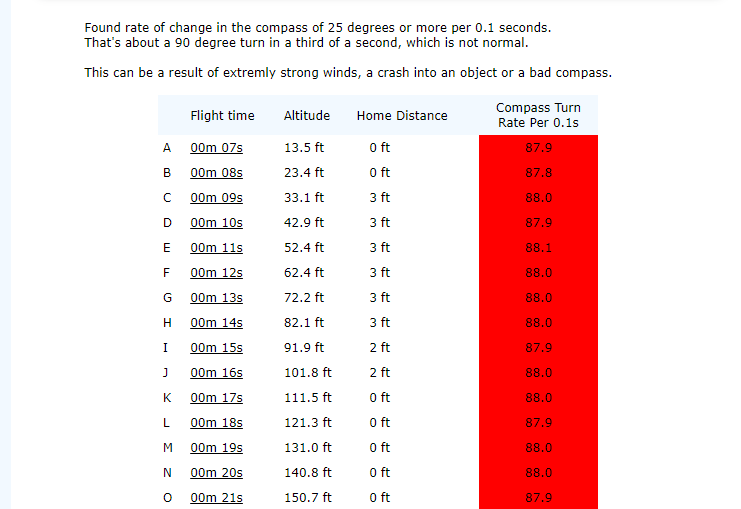
Well, so far no one has been able to figure this out, Pix4D or Autel. I have a note into Autel to see if I can send the drone back to them to test it out. I also found this while looking through my AIrdata flights. It’s pretty consistent for most of the flights with this bird. We did a compass and IMU calibration prior to the flight.
I bought an Autel Evo II Pro V2 RTK uav back in November as a birthday present to myself. It’s a pretty neat vehicle to learn to fly and get your Part 107 cert. Of course having visual observers, the furthest I’ve flown is about 0.5 mile, mostly pines and few hardwoods in my area. I’m surprised it flew that far with all the interference.
I’m planning to try hooking up with the RS2, maybe even my M2’s . I’m hoping all this info will allow hooking up to our Javad gear also. Thanks to all for providing the info for connection. Autel support isn’t as good as I thought it would be from my experience. Had an issue with the smart controller and uav hooking up, but other than that no problems. Thanks Emild, David, Autel (and others) for providing guidance on RTK with RS2 and Evo II.
3 Likes
Congrats! I think you’ll have a moment of clarity once you get the workflow down. I knew what I expected going into RTK mapping but once I actually started achieving that consistently it was obvious that I had made the right choice and a small weight was lifted.
2 Likes
Finally got an answer to my vertical accuracy issue from Autel. Seems they have the same issue on other V3 drones…figured as much. I’m told there will hopefully be a firmware release to fix this but didn’t get a time frame. Quote below from Autel support.
“I’ve spent the last couple of days working on this with our engineering team. We’ve found that we get the same results from other V3 drones as yours, we’ve reported this bug to the appropriate team. Hopefully there will be a firmware update out soon, for now however we will be shipping your unit back as we currently do not have a resolution from a hardware standpoint.”
At least now I know I’m not crazy after 3 months of trying different things.
6 Likes
Hello, did someone here was able to connect the Autel Evo 2 Pro RTK v3 with the RS2 v30 through local ntrip? Do you know if there any problem recording raw data with the Evo?
1 Like
I haven’t been using my GNSS equipment lately due to mapping work,
weather and flying my EVO II PRO RTK V2 when I had some free time and it was nice outside.
I was going to try and hook up with my RS2 or Javad today after work.
But I got to thinking, why not just use my mobile hotspot for the Smart controller (big one) to hook up with the state RTN.
Worked like a charm on first try. Flew round about 30 minutes (1 battery) at 150’ AGL with a fix all the time ( +/- 2-3 cm accuracy indicated for both vertical and horizontal) It was almost getting dark so I RTH and shot pic of accuracy after landing while still hooked up with EVO on ground with RTN
pretty neat I think
3 Likes