I am new to surveying and with Emlid. I am having issues with processing my data with Emlid Studio using Stop and Go with Emlid flow. When I placed my CSV file against my rover and base data it says “0-13 points averaged.”
Also note that when I initially did my survey I input the wrong coordinates on my base over a known point. I did re-corrected on Emlid studio but still no result.
I went ahead and placed a link to my project if anyone can help with this issue.
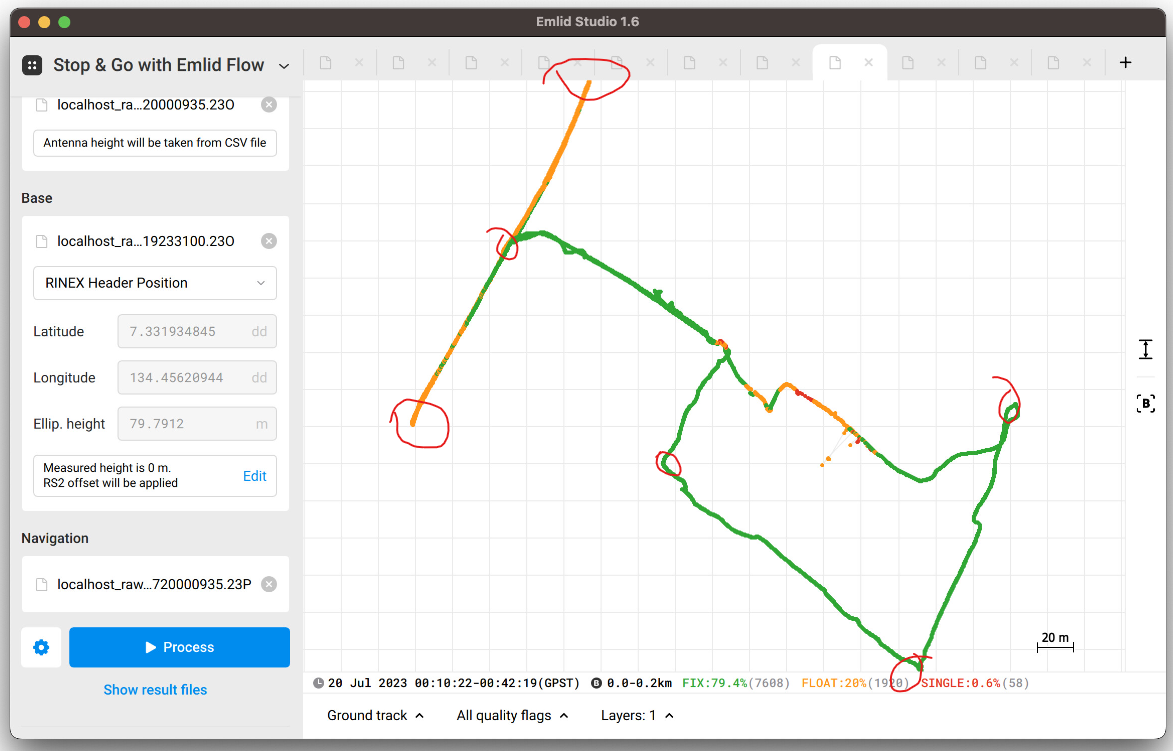
I do have a follow up question. I am processing a top down map of this area. I noticed that in the corrected CSV it has missing points. Specifically points over established GCPs. Am I able to retrieve these points and process according to the original position (LLH files)?
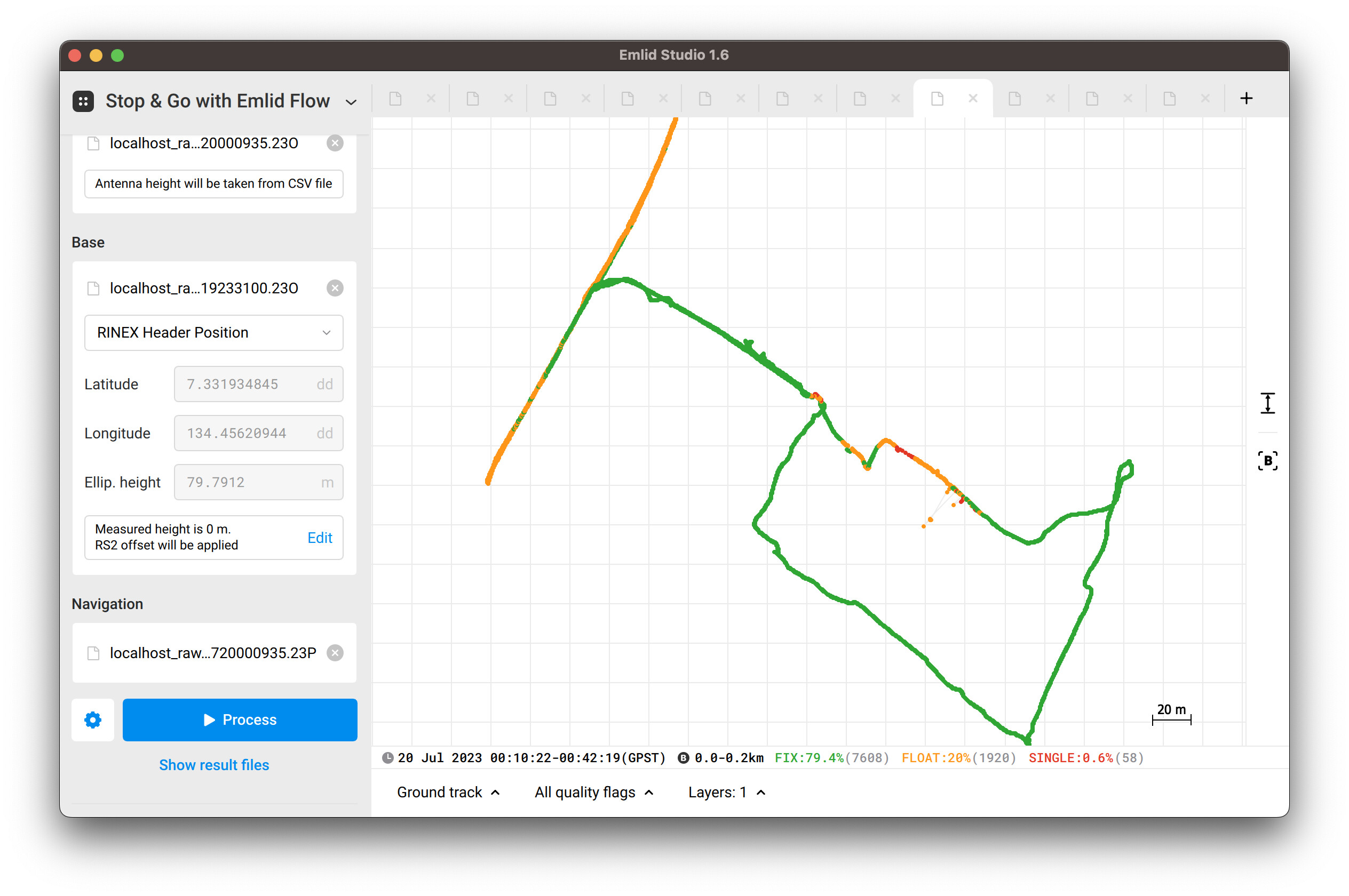
If points were collected with the SINGLE solution, you’ll see the same status in the original Position log. So they will have a meter accuracy. It won’t help you to get precise rover coordinates.
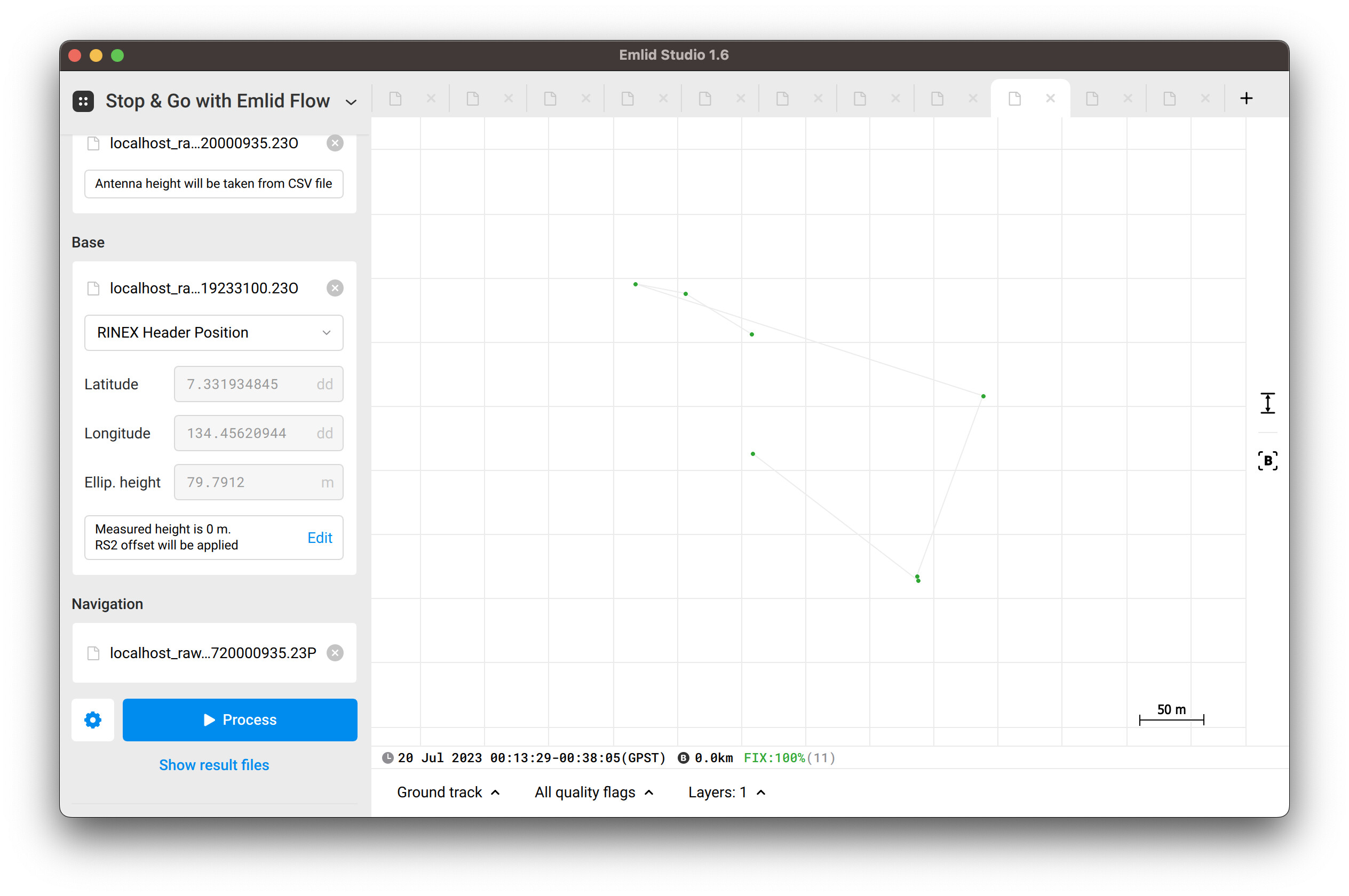
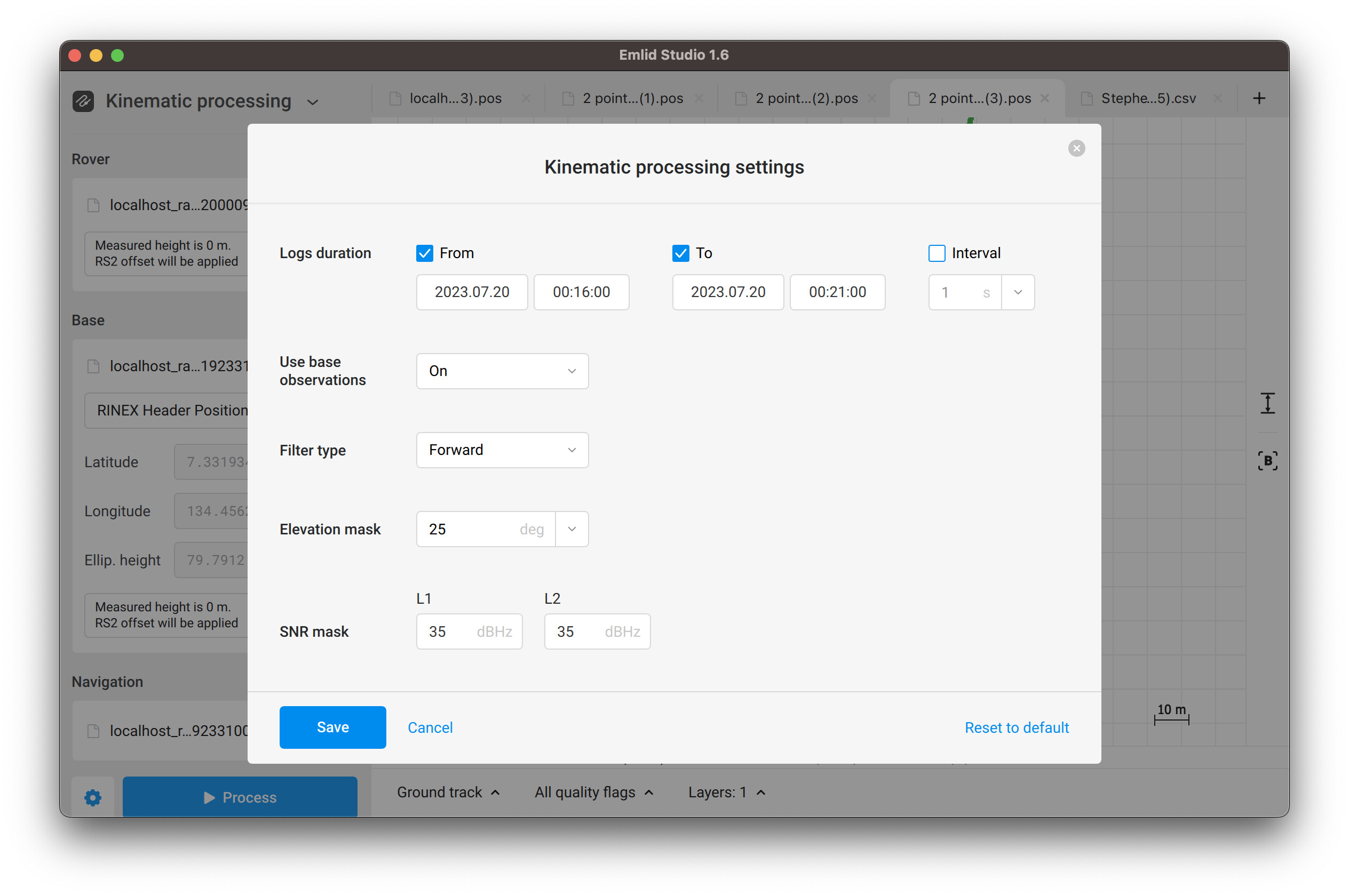
I’ve decided to process this particular part of the log. To cover the time span when these two uncorrected GCPs were collected, I’ve chosen a 5-minute period from 00:16 to 00:21 (approximately 10:15:42 - 10:20:42 UTC time):
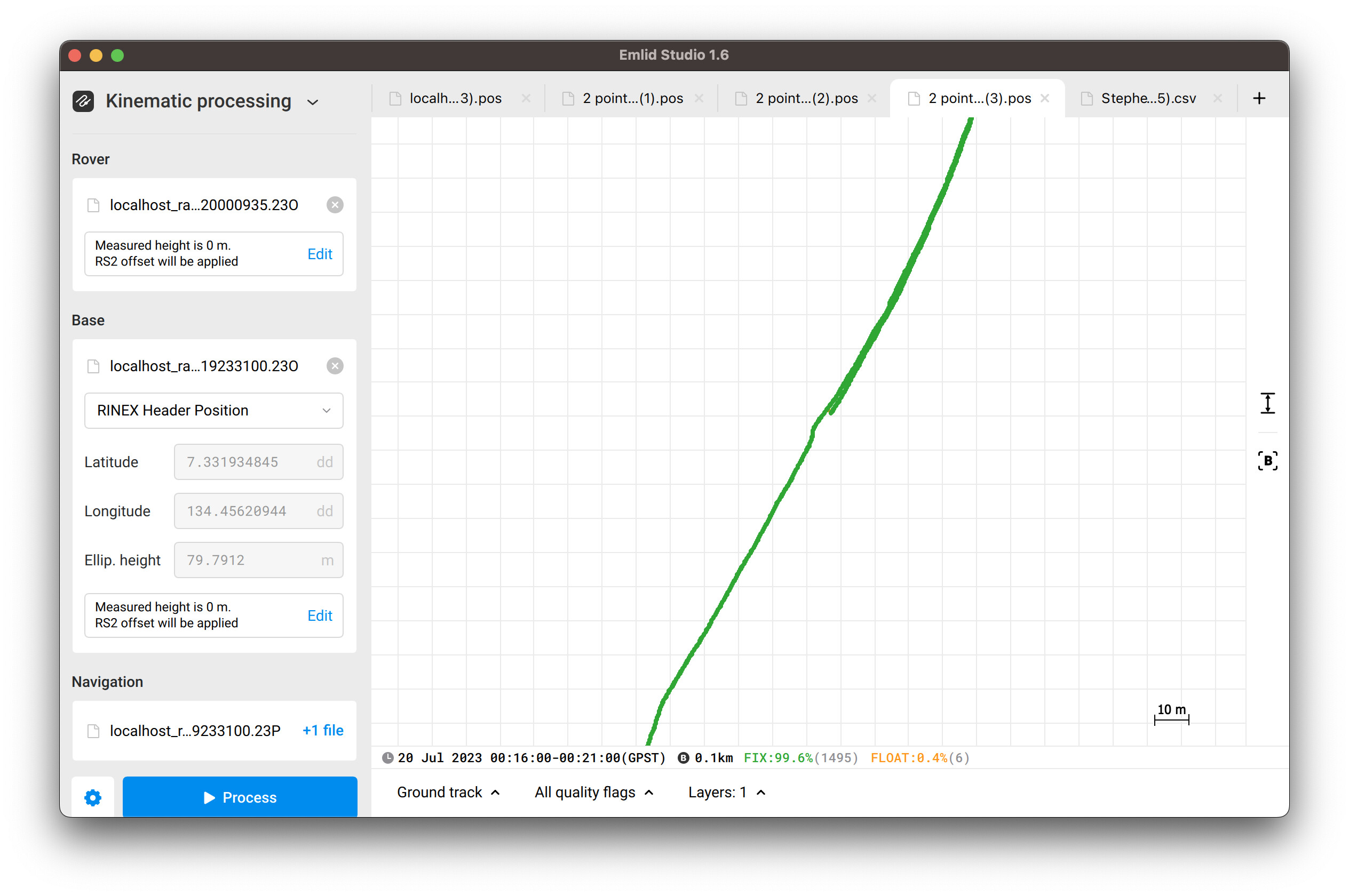
The rest two GCPs were improved to the FIX solution using this pos file. You can find the resulting files in the zip archive below. SL last 2 GCPs.zip (37.1 KB)