I’ve been trying to integrate the Emlid Reach M2 into Ardupilot for RTK, but I’m having some issues. I am using an NTRIP connection to send updates to the RTK module, but when I try to inject GPS into MP, the Emlid goes silent and stops receiving corrections and disconnects from the internet while MP says connection attempt failed. When I unplug it from the pixhawk and cycle the power, it will start working fine again.
The M2 is connected to NTRIP and receives corrections, but as soon as I click connect on MP, it goes silent, all lights turning off on the M2 except for the orange light.
I followed this page exactly for the parameters, so if I need to change these parameters since I’m using NTRIP, please let me know: ArduPilot Integration | RTK Modules
But, I’m not 100% confident that I have all the parameters right since I’m using NTRIP.
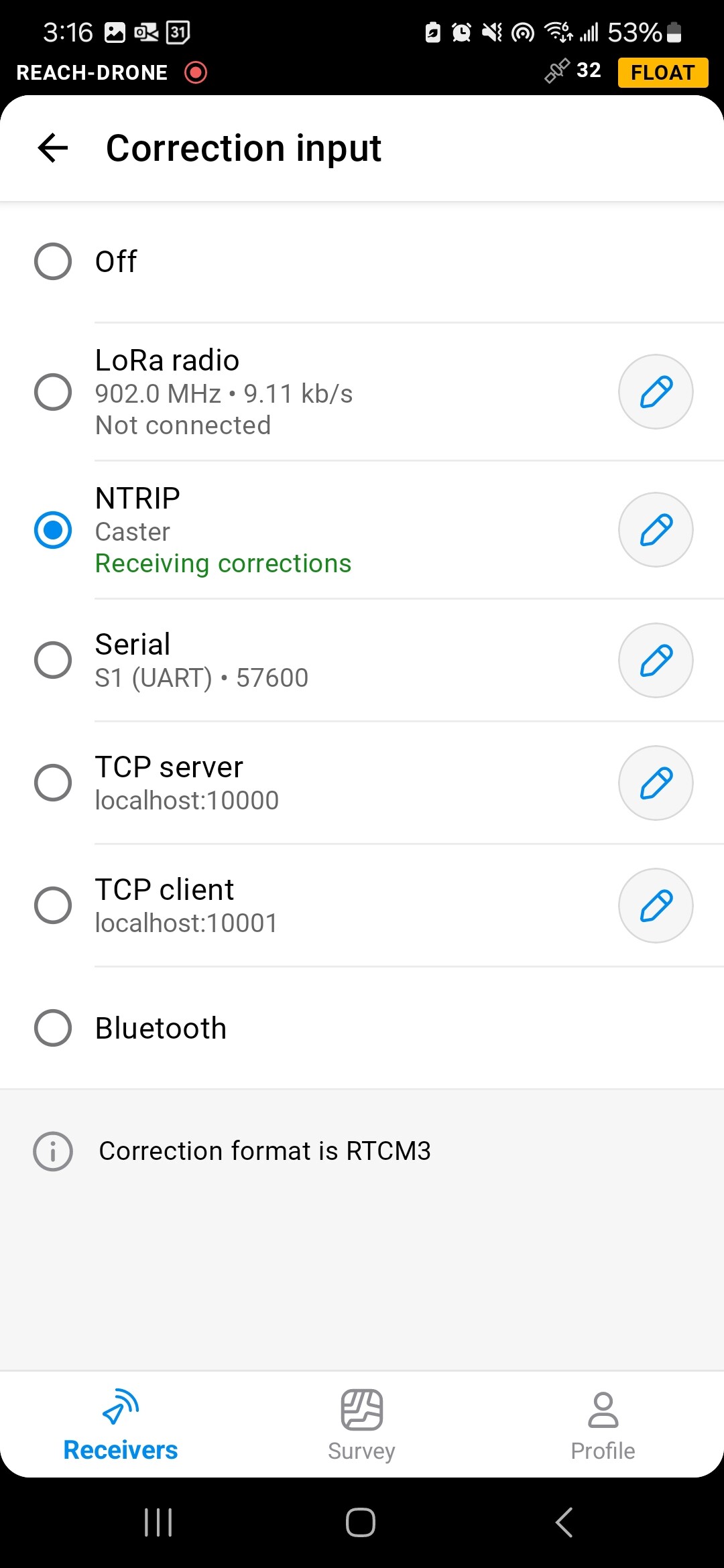
For Correction Input: Using NTRIP with all of my NTRIP provider settings
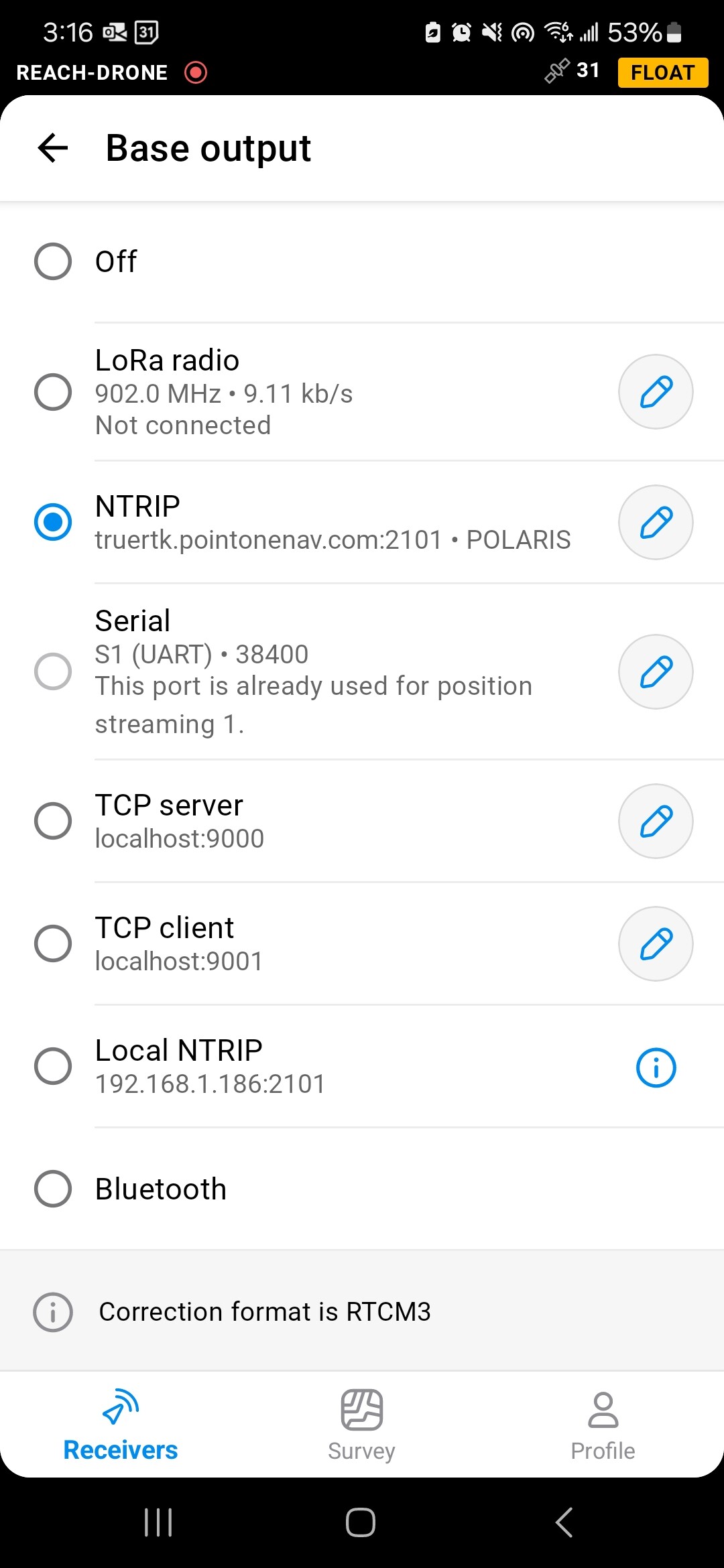
Base Output: TCP Server, localhost:9000
Also, for some reason, my telemetry radio connected to my flight controller stopped receiving power and I didn’t touch anything to do with the radio connection.
Hi Truett,
Welcome to the forum!
It sounds like the issue might be power-related. If only the orange LED stays on, it usually means the M2 isn’t getting enough power. Pixhawk may not always provide sufficient power for Reach, so I’d recommend using an external power source. You can power the M2 through the JST-GH ports (S1 or S2) or via the micro-USB port. For operating, 5V is required.
Also, I’d like to clarify that Reach doesn’t re-transmit NTRIP corrections. It’ll send its own corrections. Instead of using Base Output, try enabling Position Streaming to send the solution to your autopilot.
Could you share more details about your setup and steps? That way, I can better understand what’s happening and help you sort it out.
2 Likes
My setup for powering the M2 is from the Pixhawk’s servo rail which gives our about 5V. There are other things using the servo rail, so I’m not sure how the power distribution works. But I also don’t understand how it would be a power issue if all I’m doing is injecting the GPS into Mission Planner. That seems like it shouldn’t be using any more volts than it already was. I could be wrong though.
I could use an external power source straight from the PDB (power distribution board) that would give the M2 25V, but I think I would need some sort of step down. Let me know what you think about whether or not I should just give it 25V or use a step down (and please give link to a good step down)
When I would inject the GPS, like I said before, all lights would turn off except the orange and then MP (mission planner) would say connection timed out because it couldn’t find any GPS.
For my parameters on MP, I just strictly followed the parameters changes from the article I sent before, so if you need to know, just look at that article. For my Emlid flow, see the screenshots for my setup there.
If I’m missing anything, check that article I sent before, and that’s exactly what I did.
Hi Truett,
Thanks for sharing the details!
We’ve seen that Pixhawk’s power output may not always be enough for Reach, which is why we suggest external power in our guide. Here are the setups that worked for others:
-
via the S1/S2 port on M2 and GPS2 on Pixhawk. Using two power sources simultaneously may damage the M2, so you’ll need to cut the +5V wire. You can check this thread as a reference.
-
via USB. One of the users found it easier to cut the +5V wire entirely and power the M2 via USB.
Before making any changes, though, let’s rule out other factors. As I see, the corrections are not injected to the telemetry unlike our Ardupilot guide explains. In your setup, M2 should connect to the Internet, receive corrections over NTRIP, and send its accurate position to the Pixhawk. If I got this right, the settings should be:
And how is the M2 connected to the Internet?
Can we also test a regular setup first—connecting the M2 to NTRIP and checking if it gets a FIX in Emlid Flow?
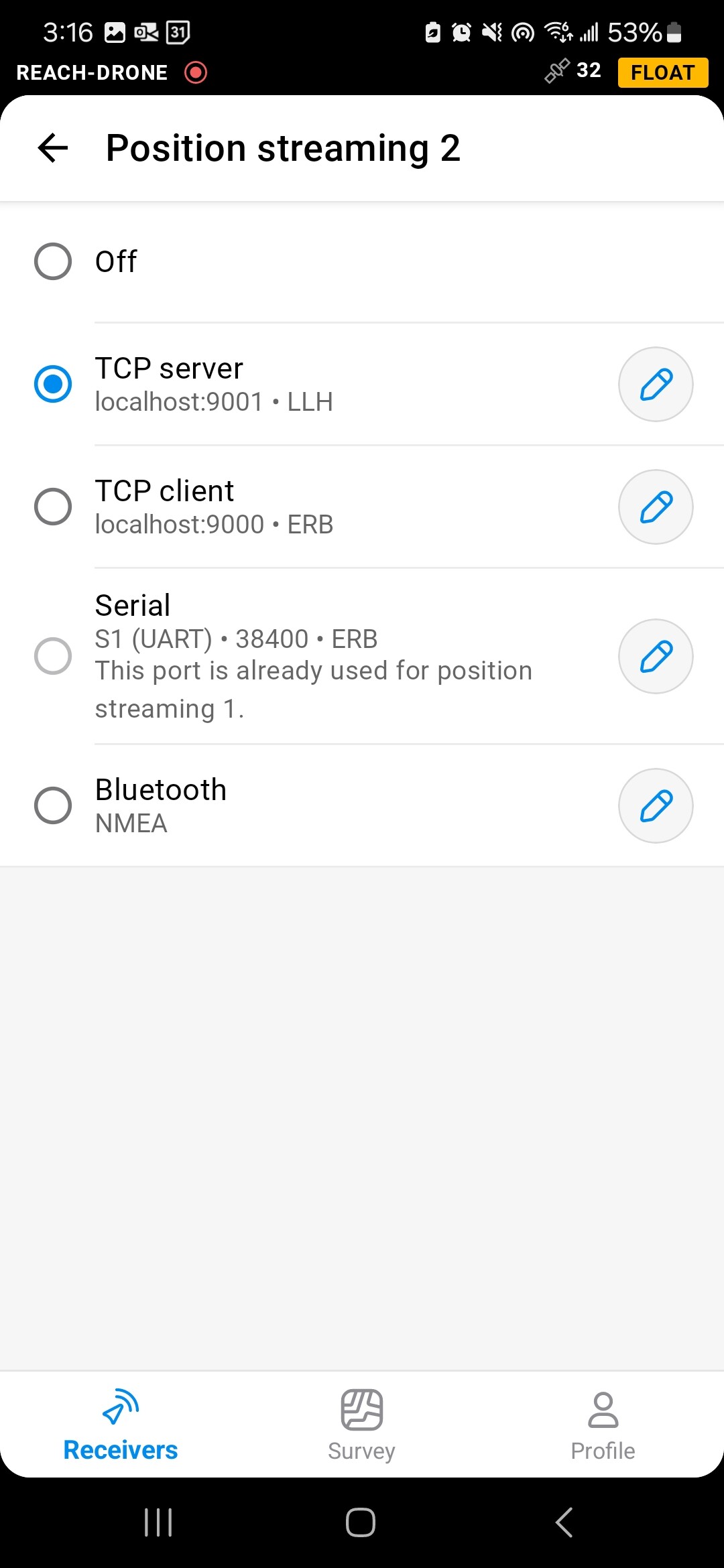
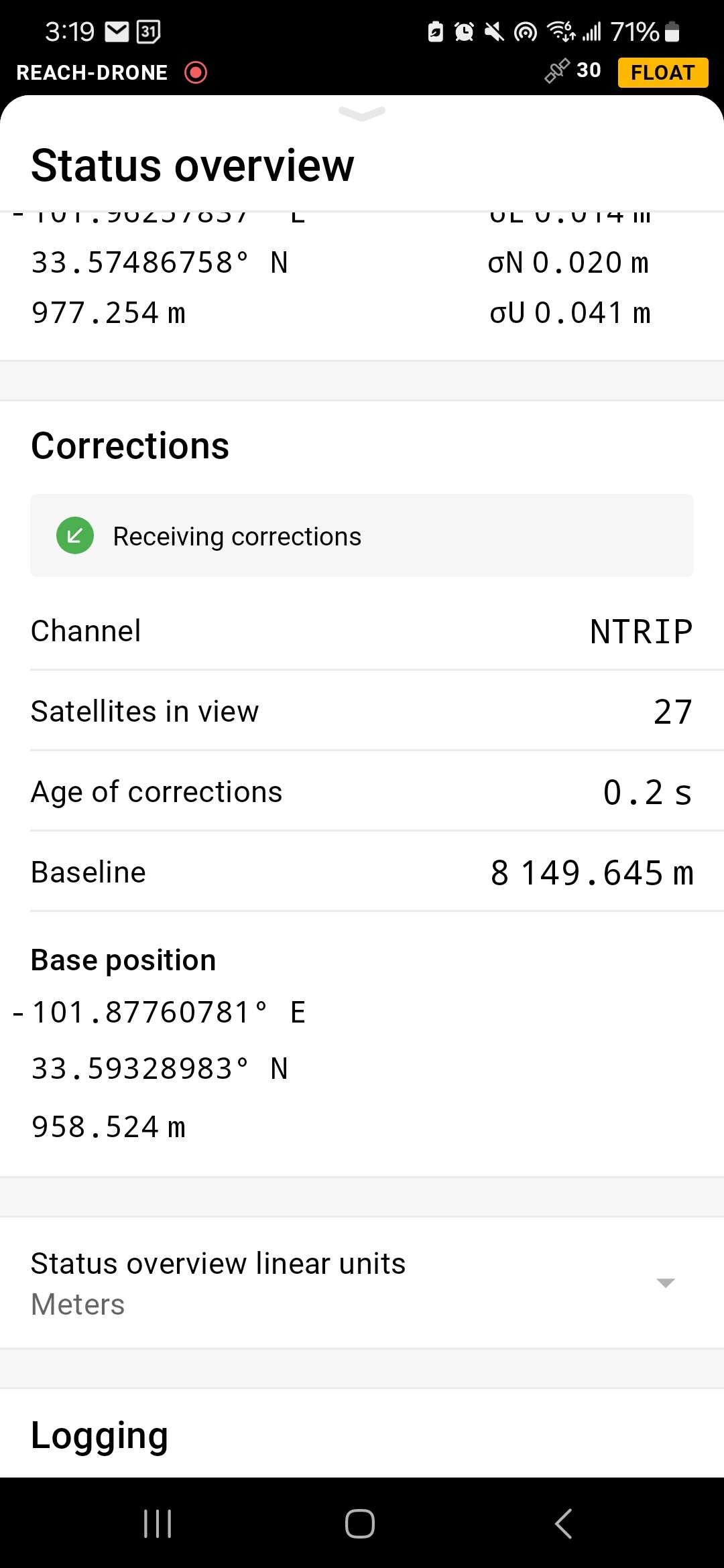
I don’t understand how the corrections are not injected into the telemetry. The M2 was connected to internet via my phone hotspot (2.4hz). My correction input was set to my NTRIP profile. The profile name was caster because I thought the profile name was just there for you to call it whatever you want. No, I do not have my own base. The position streaming was set to serial when this happened. Yes, the M2 is receiving corrections, see the screenshot for more on that.
Honestly, this might be easier to hop on a quick call and you could ask me all the different things that you need and figure out the problem from there. Otherwise, I think we are just going to go back and forth for weeks. What do you think?
Hi Truett,
To embed corrections into the telemetry link, your NTRIP source needs to inject them. Mission Planner can connect to the NTRIP server and forward the data via MAVLink. The autopilot should then pass the corrections to the receiver over Serial.
Our guide covers a setup with own base station. Since you’re using an NTRIP service, you need to follow ArduPilot’s guidance for this step instead. I looked it up and found this one.
Other factors to check:
• Does the M2 have a stable internet connection?
• Can it achieve a FIX using the current NTRIP profile?
• The red LED usually indicates a power issue—worth checking.
I’ve sent you a PM so we can go over the details.
Hi there,
I’d like to leave an update here in case it helps anyone with a similar setup—we got the M2 working with Pixhawk! The setup was pretty straightforward and followed the usual steps, except we used NTRIP instead of a base. You can add NTRIP credentials as shown here.
It turns out there was also a power issue. Pixhawk wasn’t supplying enough power for Reach, so we switched to an external source. To be safe, we cut the +5V wire entirely and powered the M2 via USB. I also shared some other power tips above.