fathan2620
January 8, 2024, 11:12am
1
Hi, i have problem with Lora radio connection with M2 and RS2.May i know the LED indicator in LoRa Radio. When the LED at Rx Tx blink and when connected what LED turns Out.
Plus, my LoRa radio can’t connected with M2 and RS2 it appeared Not connect in Emlid Flow. here is the attachment of simple report and full report https://drive.google.com/drive/folders/1nB4jhifUz47qb4ViXHWitiZD0yDjZtBT
Hi Fathan,
Welcome to our community!
Thank you for sharing the files. Could you please give me access to them? I have sent you a request about that.
Do you have another LoRa cable to connect the radio to M2? If yes, please try to use that to check whether the issue is related to it.
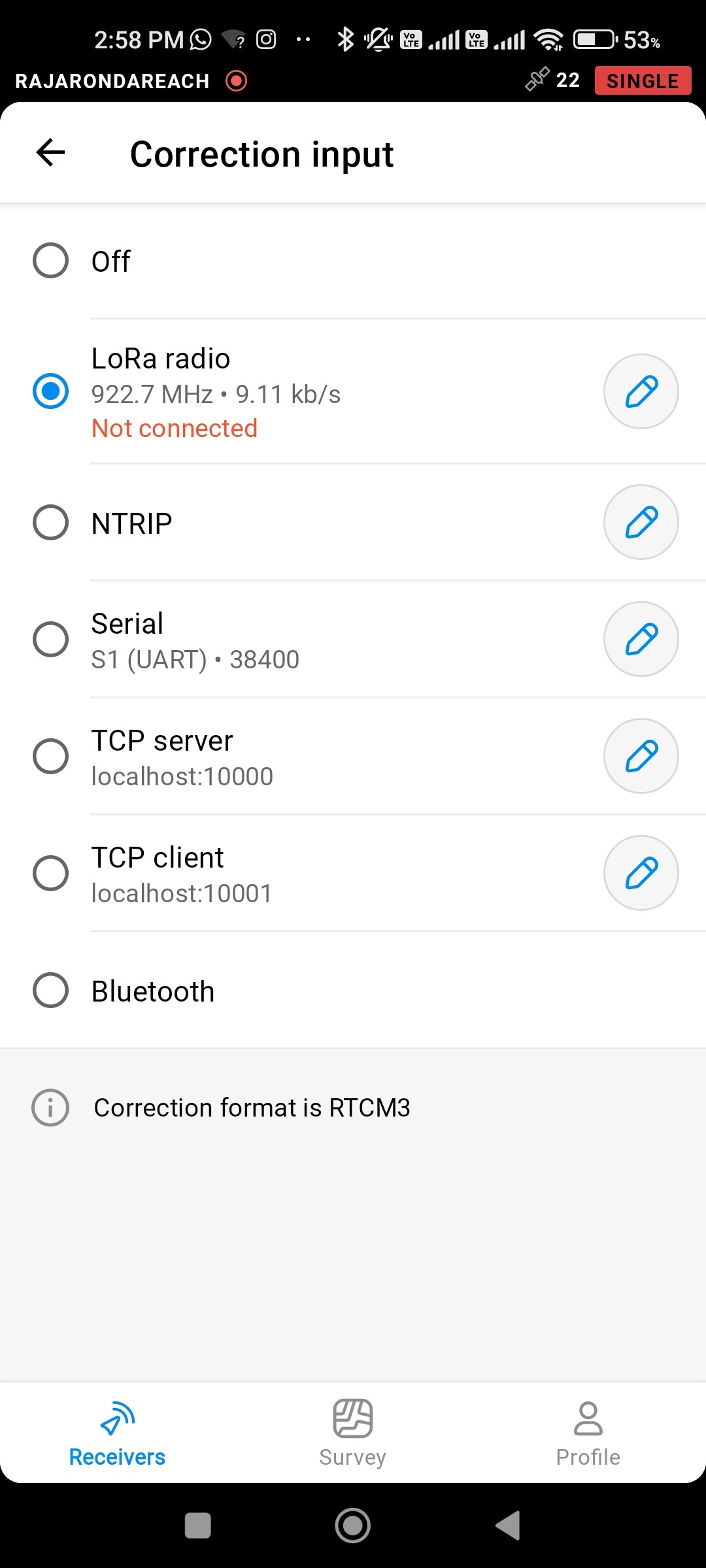
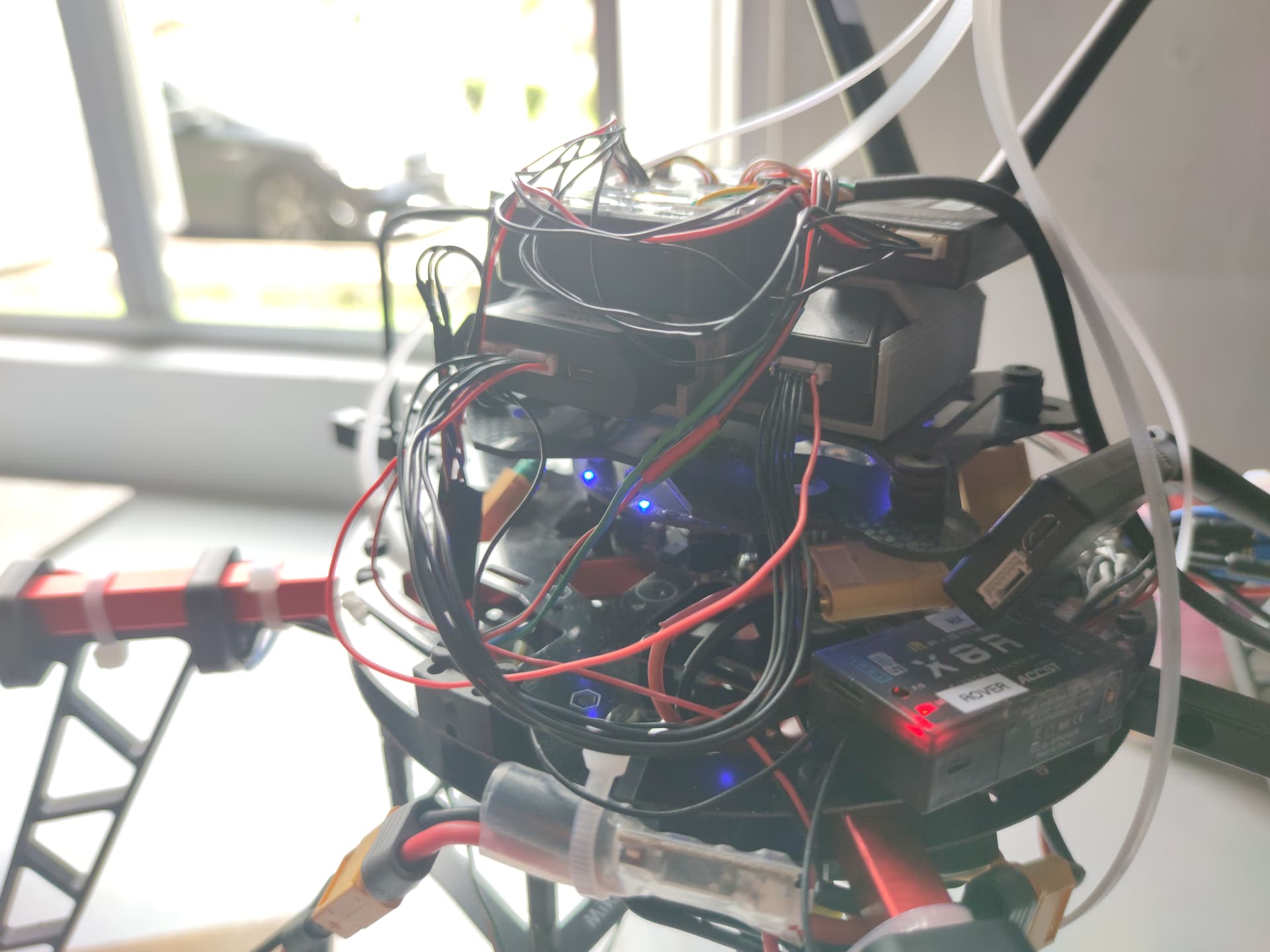
Besides, could you please send us a photo of your setup and a screenshot of the Correction input page in Emlid Flow?
1 Like
fathan2620
January 10, 2024, 6:14am
4
I already used original cable but the led won’t appear… it’s appear only early when power up the lora radio
Hi, I’m afiq. I’m one of Fathan’s team members.
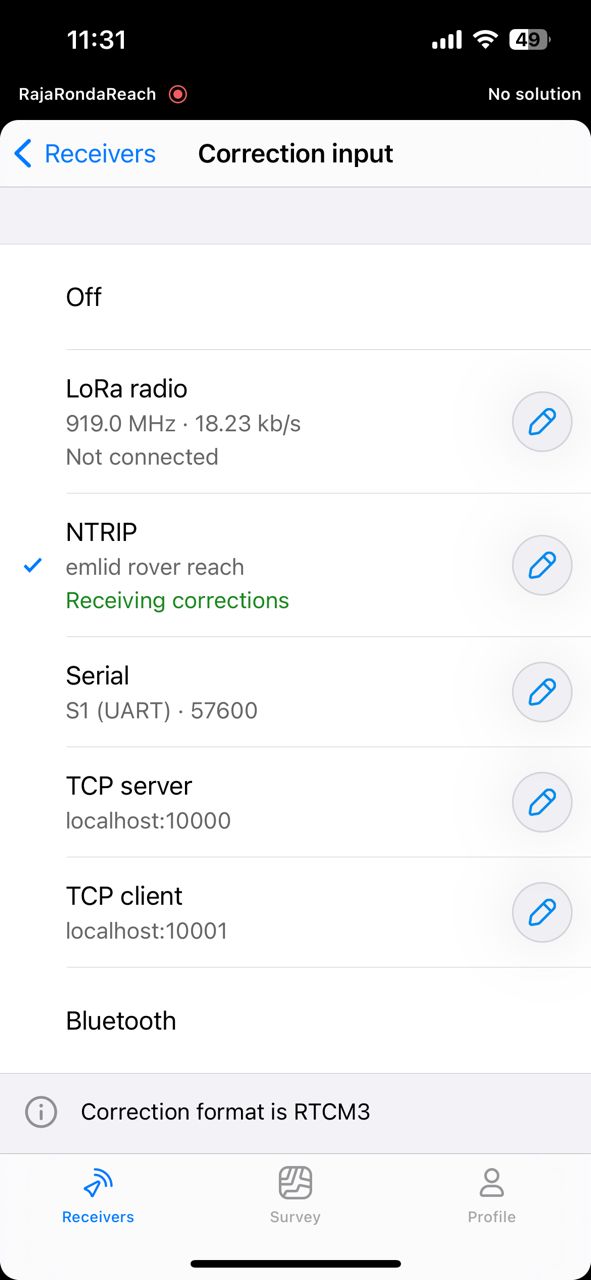
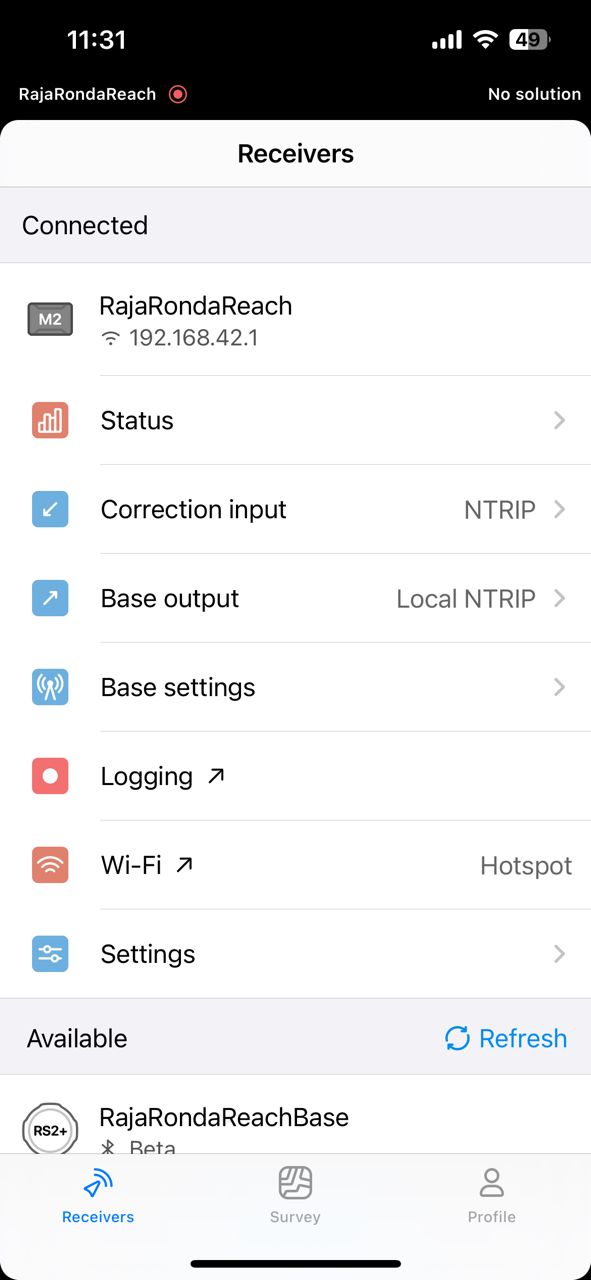
so this is our correction input page in emlid flow.
Hi @fathan2620 and @afiqdaniel1803 ,
Thank you for the screenshots. As I see, you’ve configured the connection via local NTRIP. You don’t need LoRa to work with it. However, your base and rover should be in the same network. With the Reach hotspot, the available range will be just several meters. That’s why such a feature is usually used for integration with RTK drones only.
To pass the corrections via NTRIP on longer baselines, you can use the free Emlid Caster . However, you’ll need a stable internet connection on both the base and the rover for it. Here is a guide about how to use it.
If you want to use LoRa radio, let’s switch to it for correction input on the Reach M2 and base output on Reach RS2 in Emlid Flow. I found our old test of a similar setup, and I see that the correction streaming was fine, even though both RX and TX LEDs were off. So, let’s just configure the LoRa first and see how it goes. If it doesn’t help, I’ll need one more screenshot from the Correction input tab from your Reach M2, a photo of your setup, and the full system report from the receiver.
3 Likes
fathan2620
January 30, 2024, 7:06am
7
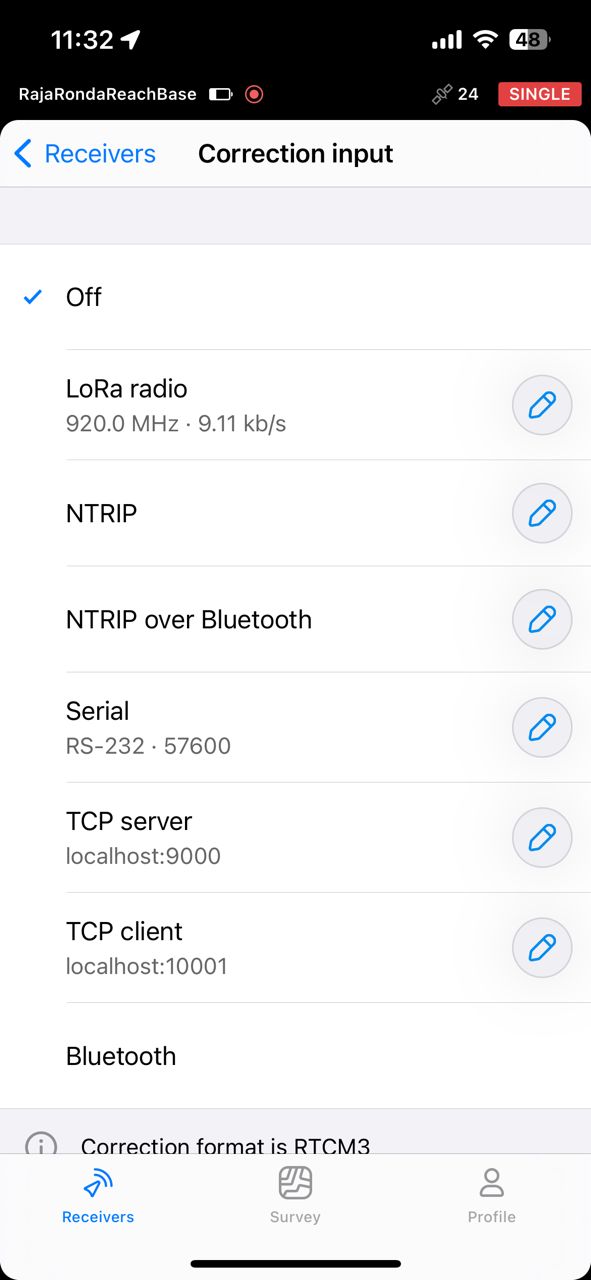
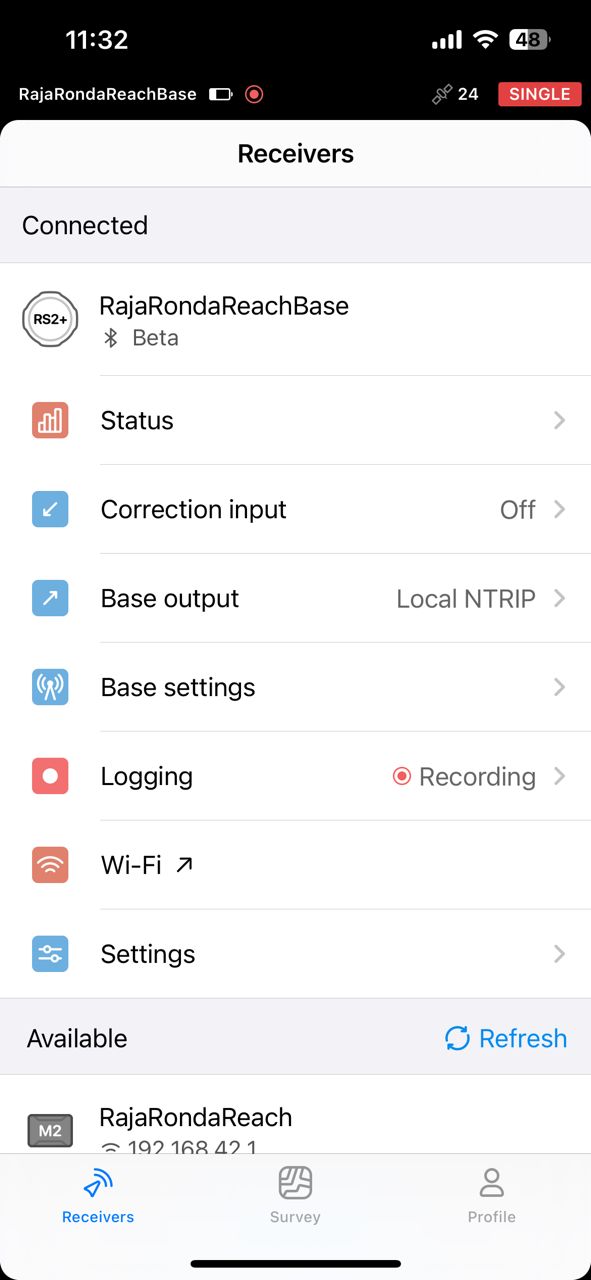
Here is the screenshot from Emlid Flow for the M2(rover) and RS2+(Base) as well as my setup
.
fathan2620
January 30, 2024, 7:10am
8
Here is the report for the base
Blockquote
Simple system report
app version: 31.8-r0’ ’
fathan2620
January 30, 2024, 7:11am
9
Here is the report for the rover
Blockquote
Simple system report
app version: 29.2-r0’ ’
Hi Fathan,
Thank you for the photos. Did the setup work well before? When did this issue start?
I see that your rover is on the firmware version of 29.2. Let’s update it to the latest version and try the connection again. Can you also give me access to the Google Drive folder with the full system report? We’d take a closer look at it.
1 Like
fathan2620
March 3, 2024, 3:19am
11
Thank you for the help, I’ve updated both the rover and base but I still can’t get any correction input through LoRa using M2. It still says that LoRa Radio is not connected. I will send the full report shortly
1 Like
Hi everyone,
I just want to note that I’ve received full system reports from Fathan and passed them on to our team for investigation. In case of any update, I’ll post it here.
1 Like
dpitman
March 12, 2024, 4:18pm
13
Just a casual look at the screenshots shows different LoRa frequencies on the 2 shots. Are both units on the same freq. ?
3 Likes
kornel.nemeti
March 21, 2024, 3:57pm
14
2 posts were split to a new topic: LoRa radio not connected
Hi Fathan,
We’ve checked the full system reports, but it’s hard to determine from which side the issue comes.
Have you had a chance to test different cables in this setup? Was it of any help?
timd1971
May 9, 2024, 12:21pm
16
If the LoRa settings do not match, then this is probably the issue @dpitman pointed out.
system
September 5, 2024, 11:54am
18
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.