I tried finding a solution on the github dronekit issues Issues · dronekit/dronekit-python · GitHub
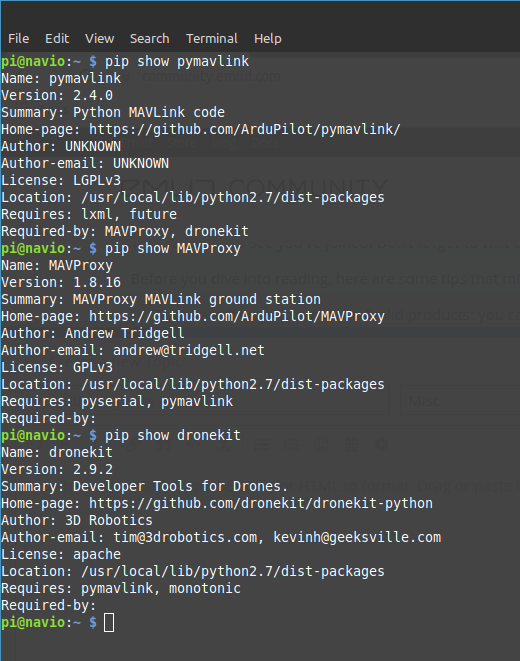
but the problems others encountered should not be the same with using navio2 as it comes with preinstalled dronekit and mavproxy … so i didn’t have to install anything on the navio2 emlid raspbian release . I also tried reinstalling the image and updating and upgrading before trying to run dronekit but it didn’t work too .
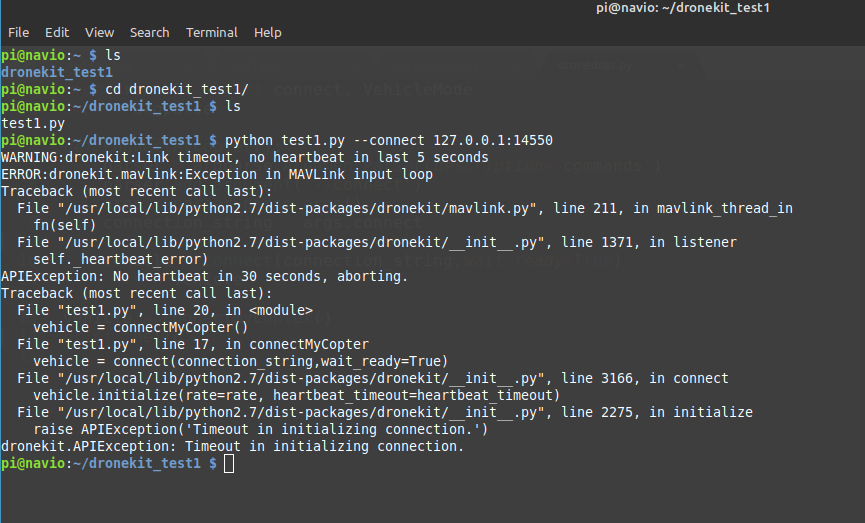
Everything worked fine and i was able to connect i run my scripts when working with SITL but when trying to connect to the real drone it doesn’t work
UPDATE : I tried to work around the problem until emlid fixes this issue with dronekit by using mavproxy in the following method :
1>set gcs in navio2 to 192.168.1.100:14550 which is the ip of my laptop
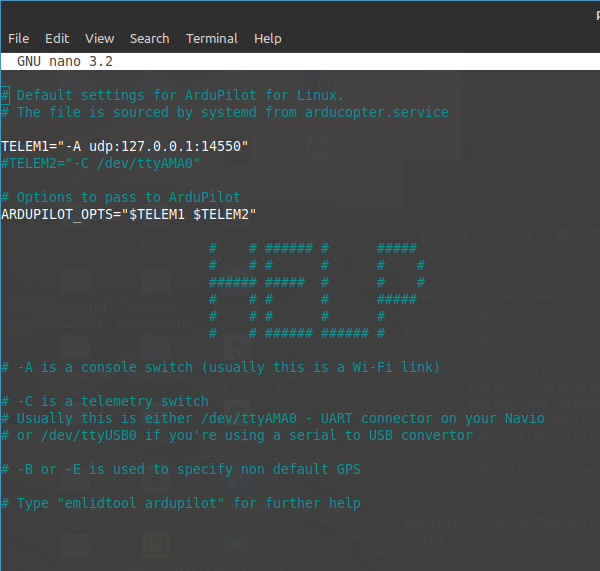
2>next run mavproxy on my laptop (GCS) and specify master to be the local host 127.0.0.1:14550 and forwared the mavlink messages to 192.168.1.103 (which is the ip of the raspberry pi that navio2 is on ) using --out 192.168.1.103:14550
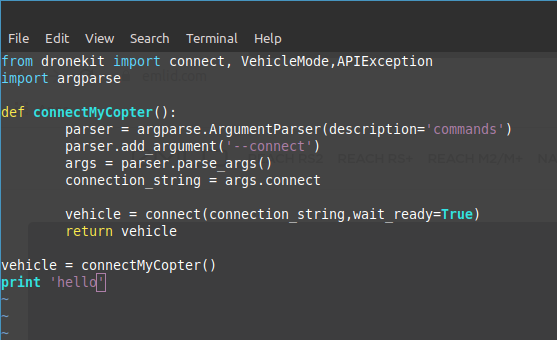
3>finally i run the python script on my laptop specifying the local host as the connect argument in this way : python2 myscript --connect 127.0.0.1:14550
And again another problem that has been there for about a year with no solution :
GPIO_Sysfs: Unable to get value file descriptor for pin 4.
GPIO_Sysfs: Unable to write pin 16 value.
repeating infinitely
I saw this problem has been posted in the community forums here Arducopter spams GPIO related mavlink messages
which states to work around this problem by typing : set shownoise False
but it didn’t solve the problem .
Please Emlid team try fixing the problem , because these specs are what distinguish navio2 from other flight controllers , so what’s the point if they can’t run .
Thanks for the reply.
running ‘set shownoise False’ only suppresses the messages. It doesn’t help dronekit.
One thing I’ve tried that has made dronekit work is by rebuilding the ardupilot source and pointing ardupilot.service to the new build rather than arducopter.service but this then diconnects mission planner from the drone.
We’ve updated the packages so that the GPIO_sysfs error should be eliminated. Now you can get the correct 3.6.11 version of ArduCopter by running the following commands:
sudo apt update
sudo apt upgrade
It’d be great to hear if this update solves the issue for you.