



From the beginning of your quest, there are some multiple issues with:
Your RC transmitter settings,
Your receiver wiring choice,
Your hardware choice (frame-motors-propellers) not coherent with your goal,
Your interaction with the software
RC Tx settings and Rx wiring can be fixed. You have to do it before moving forward.
You can do with the hardware, it is not the easy way. For your “next” project, there is a tool: eCalc https://www.ecalc.ch/xcoptercalc.php
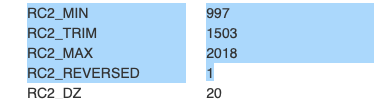
Arducopter need a lot of reading and understanding. When somewhere in the wiki, you read that you need to reverse Pitch command in the TX settings, you do it. You do not do it in the arducopter Pitch settings (according to your latest log parameter reading, you need to fix that point).
In your motor setting, MOT_HOVER_LEARN is selected.
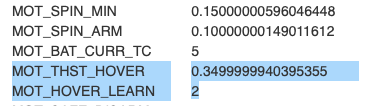
You have to fly in hover with steady altitude during a while and tame your throttle control before MOT_THST_HOVER is adjusted. At the end, you may have a value around 0.25 or less.
… a lot of work, one step at a time…