We are flying a fixed wing Drone in PPK methodology,
How ever in between flight Emlid M2 is missing some triggers.
Flight no 1 6 trigger events missing
flight no 2 30 trigger events are missing.
I am attaching base and rover log Rinex file here please help what could be the possible solution to fix this.
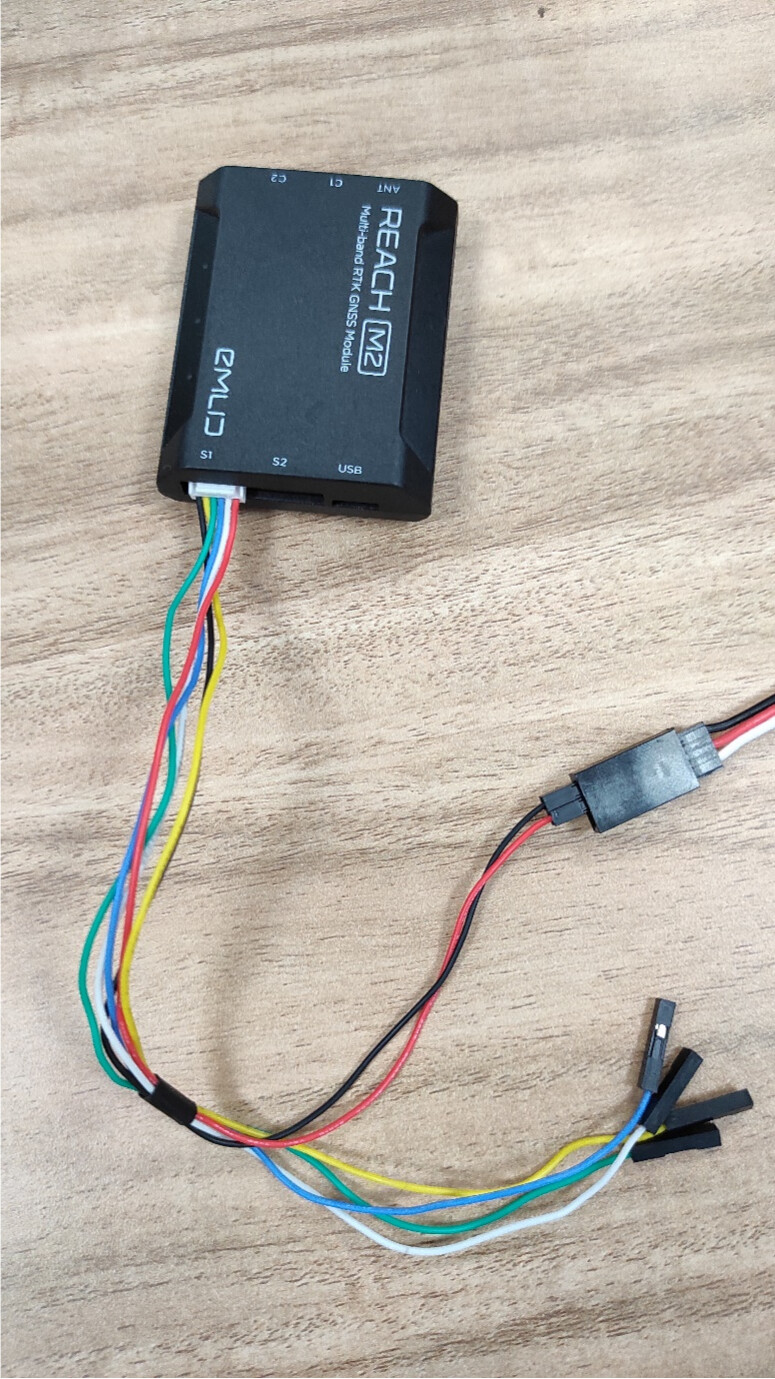
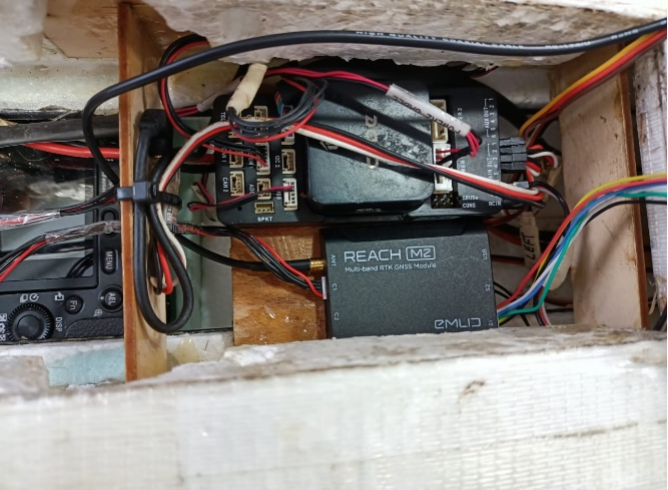
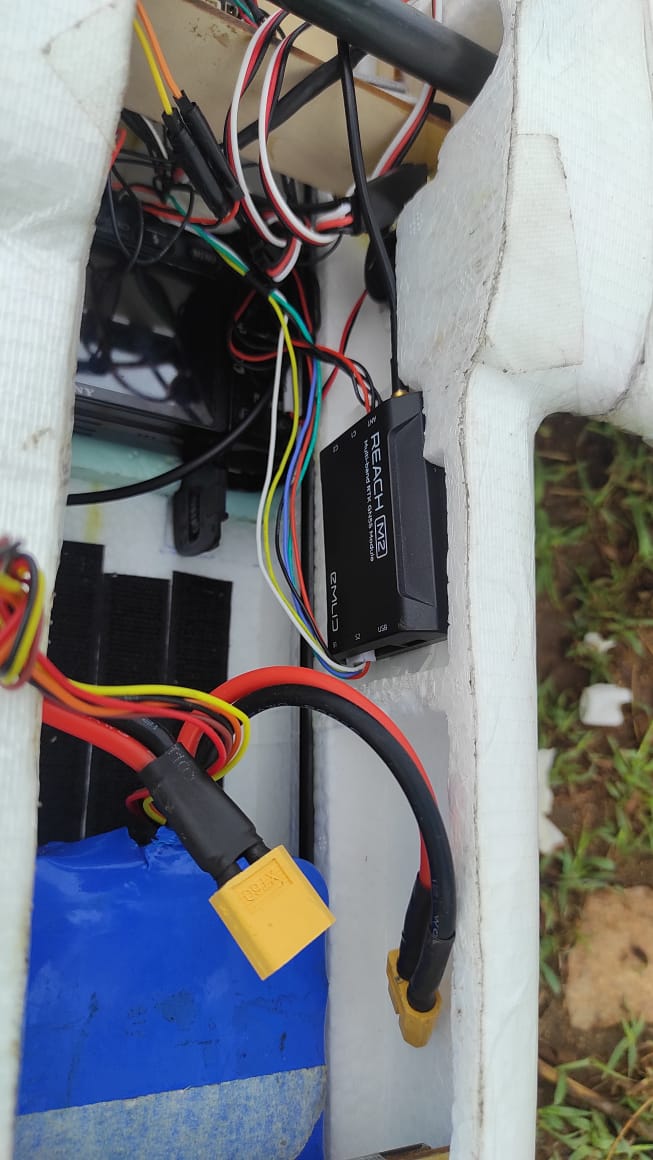
We are using this product for PPK mapping using a fixed wing drone. M2 device is mounted inside of UAV and GNSS antenna is mounted on the Top of UAV please find attached images for your reference.
We are using this product for Large scale PPK mapping. M2 device is powered with 5 V from autopilot and Hotshoe port is connected to Sony A6000 camera. camera triggering is controlled by Autopilot itself.
While flying for survey mission in between randomly M2 device is not taking events/recording events. I am attaching Rinex files of base and Rover. Please help us out with the possible solution to this problem.
Thankyou for your response.
Yes, in every flight no of photos are more than trigger events from M2 device.
Camera is running in manual focus mode and auto shutter time as per flight planned, as trigger message comes from autopilot camera will capture photo. where in hotshoe port should sense the signal and generate a event which are missing at some places in between the flight. that is causing low events generated in the M2 device when compared to actual images captured in the camera memory.
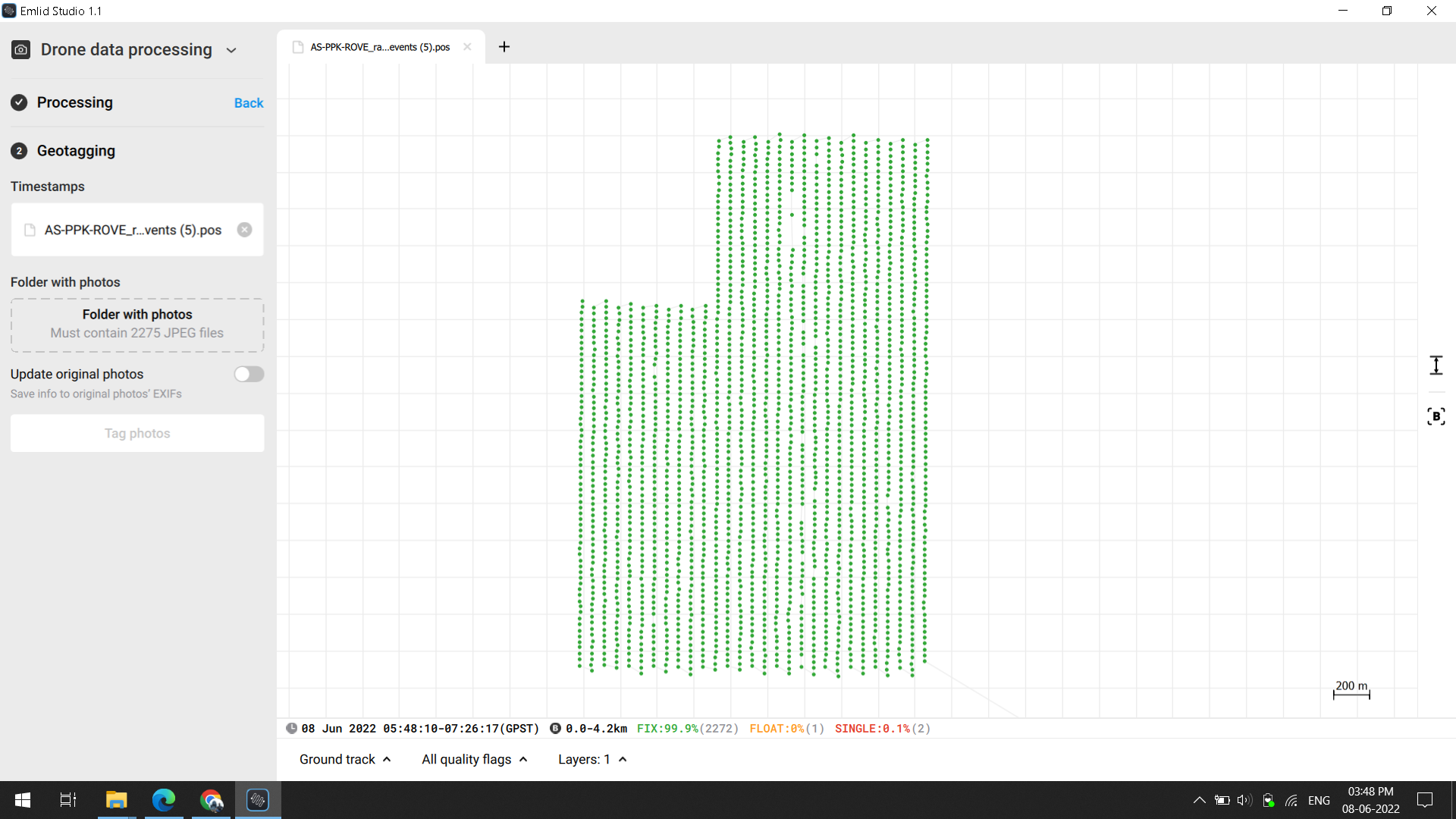
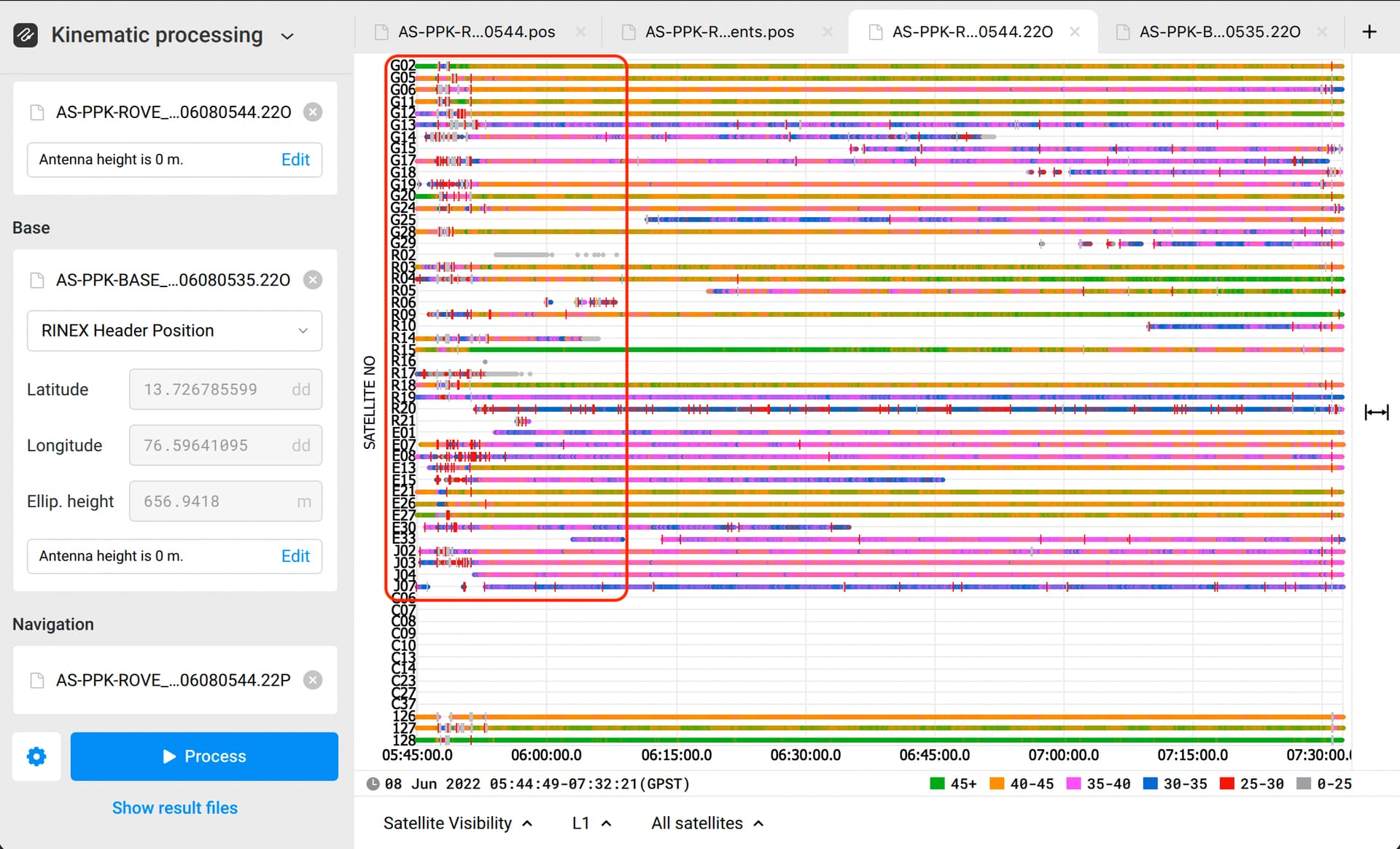
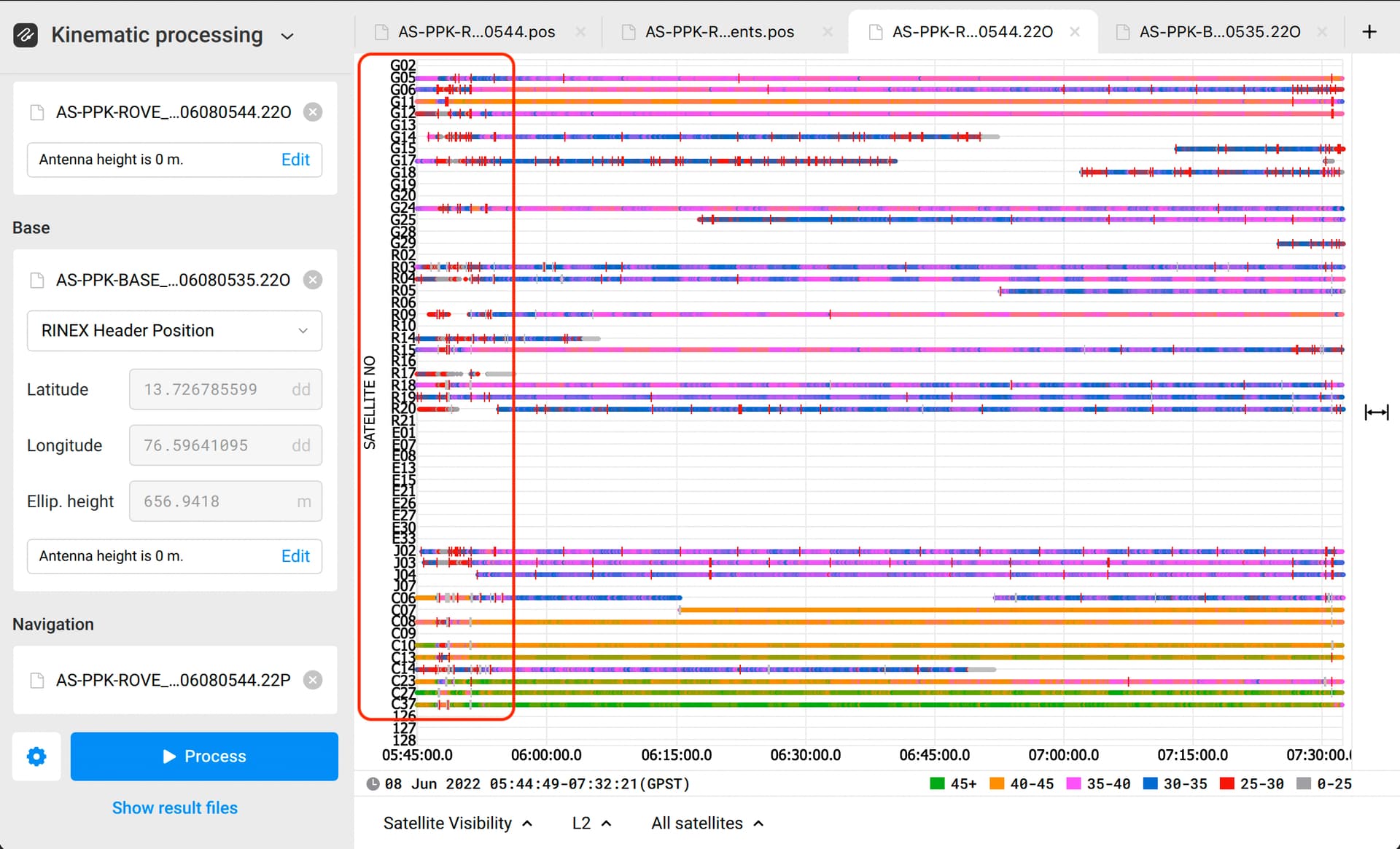
attaching a screen shot from emlid studio after post processing.
On some Sony cameras I have seen that the flash signal is not triggered if the shutter time is above 1/250s (max flash sync time). Could this be the reason here as well?
Could be a reason, but we are running shutter speed of 1/1250s for the speed which we are flying our drone. we have to consider that with the same settings all the other triggers are generated.
I’ve checked your logs from the PPK Log.rar. Your rover log contains 2275 time marks, I obtained the same number in Emlid Studio. And there are indeed some gaps in the flight route.
It may be a hardware-related issue. Just for sure, which hot-shoe adapter do you use? Is it possible that you modified it?
Hardware-related means that Reach is likely affected by RF noises. Due to your logs, there are cycle slips looking like red bars and gray strings, which means that interference sources impact Reach.
I’d recommend you isolate the receiver from all possible RF sources: the wires, battery, and other electronics. It may help to avoid missing time marks.
Drone it’s is a small compact system. no matter where ever we try to isolate or mount we will get time slips.
We did try with brand new M2 receiver and GNSS antenna.
this time we have mounted M2 by wrapping aluminium foil and also mounted GNSS antenna on a conductive plate.
still same issue we are facing. i want to understand is this the same issue every one facing with emlid? or is it only we?
we have tried flying drone in a different location as well still the same.
it feels really embarrassing when we get deployed to a project it is not generating triggers randomly.
Before we make any conclusion, we have to check the logs from the second receiver. Please send them, and I’ll check their quality. The second receiver may be affected by the same interference, but we have to verify it. That’s why the logs are needed.
You can send them via PM since there can be sensitive data.
I did a reset of M2 device as per Firmware reflashing | RTK Modules which was suggested by Indian Reseller KK sales. firmware installed was 28.4.img…
After firmware was installed we did carried out 2 flights.
Flight no 1 M2 device was mounted beside the flight controller.
Flight no 2 M2 device was mounted on the wing of fixed wing drone.
In both of the flights which were conducted there are missing triggers randomly through out the flight path.
For your reference I am attaching both the flight Logs. I had to cancel the survey project with all these issues. please rectify these at the earliest. Is there any chance that I may have received faulty/broken M2 units which was supplied to me By KK Sales(INDIA). if yes it is, Please take further action immediately.
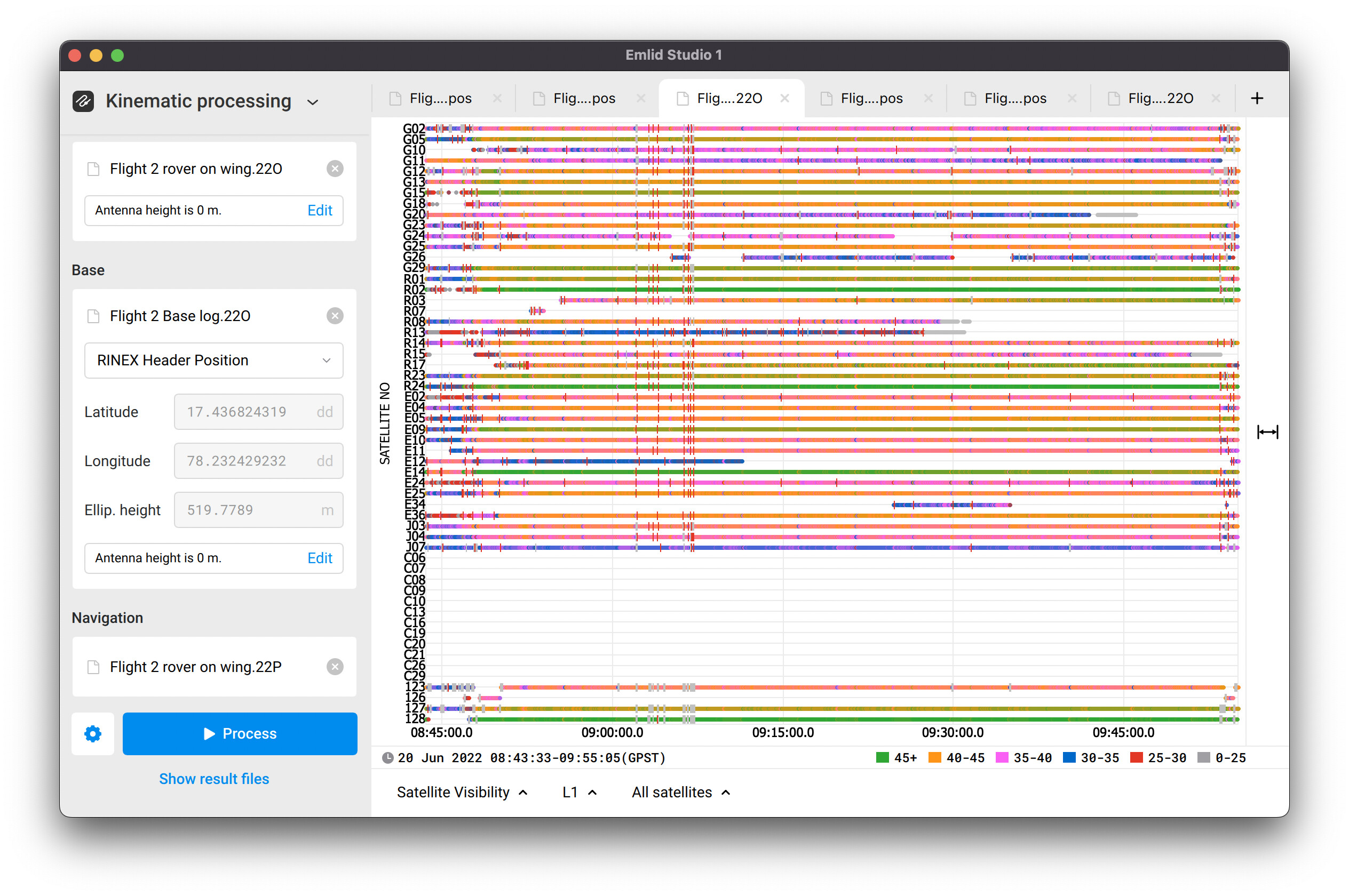
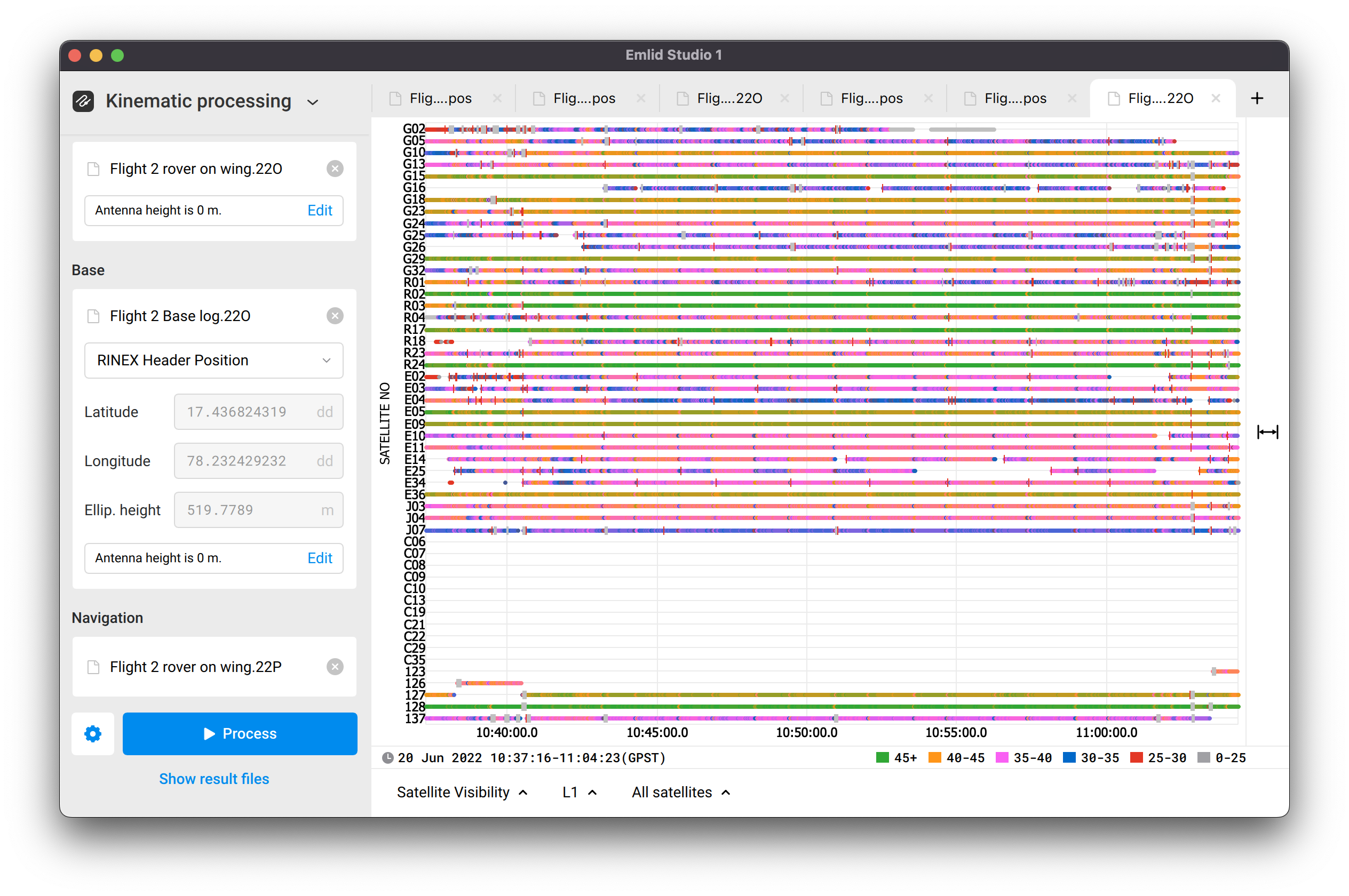
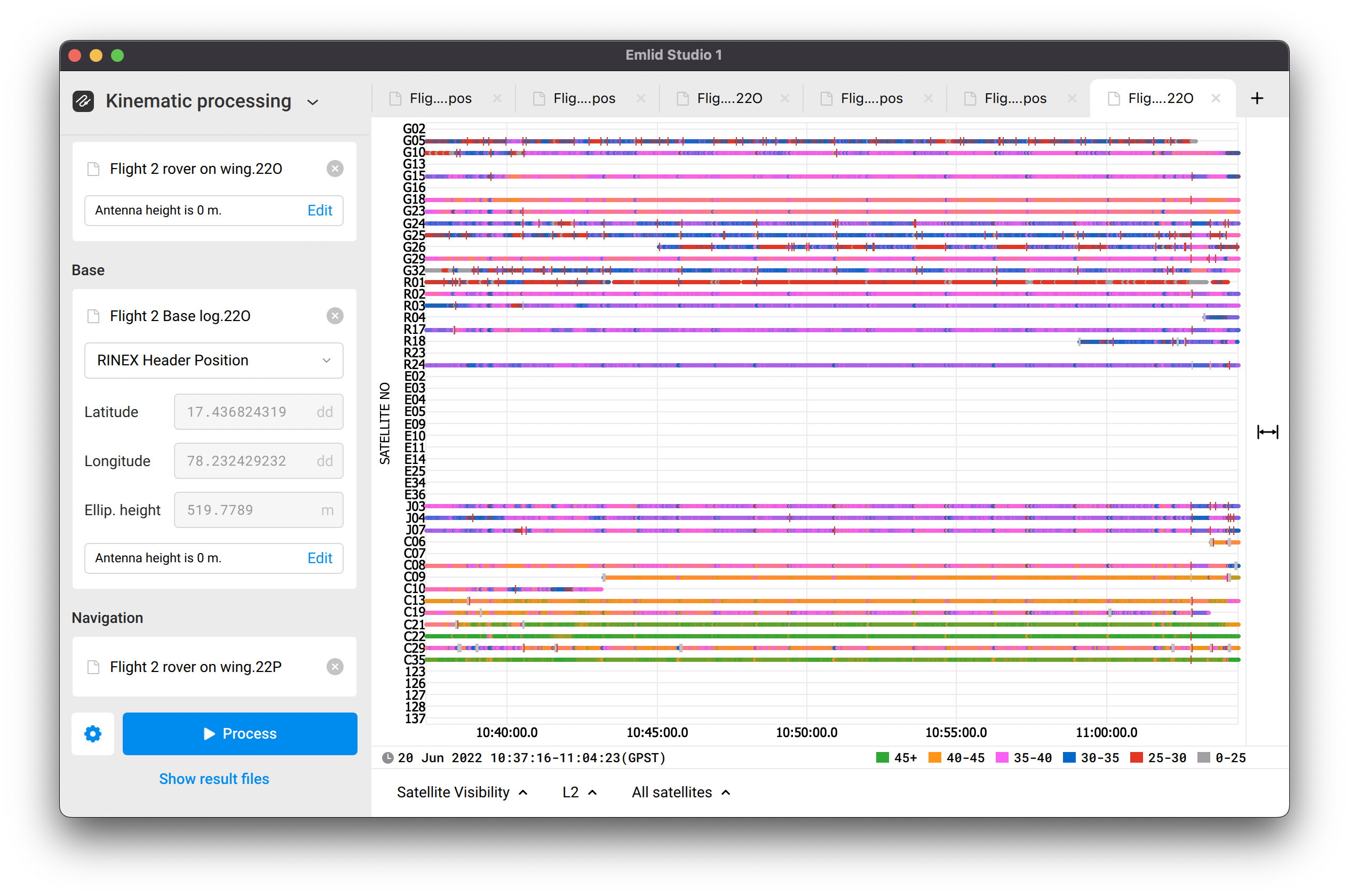
I’ve checked the logs from both setups. The issue persists due to the same reason. Both logs have poor data quality, particularly the one from the first flight. In this case, I obtained events only with 75% of the FIX solution. There are many red bars in the plot, which mean cycle slips. On top of that, SNR values fluctuate periodically during the whole log. It looks like a sequence of purple and orange bars in the plot.
All of these factors indirectly point to hardware setup issues. Reach is still affected by the substantial interference no matter where it’s mounted: besides the flight controller or on the wing. It may cause not only FLOAT or SINGLE solutions but also missing time marks.
To be fair, you can alternatively record time marks with Reach separately from the drone. It will show us whether it’s Reach-related or not. But I’m pretty sure that the main reason is strong RF noises impact the receiver’s behavior.
Kirill, its all messing up real bad now. I have Conducted 2 more flights day 1 and day 2 which came out good, same drone same settings in a different location on day 2 came out to be bad (missing triggers again).
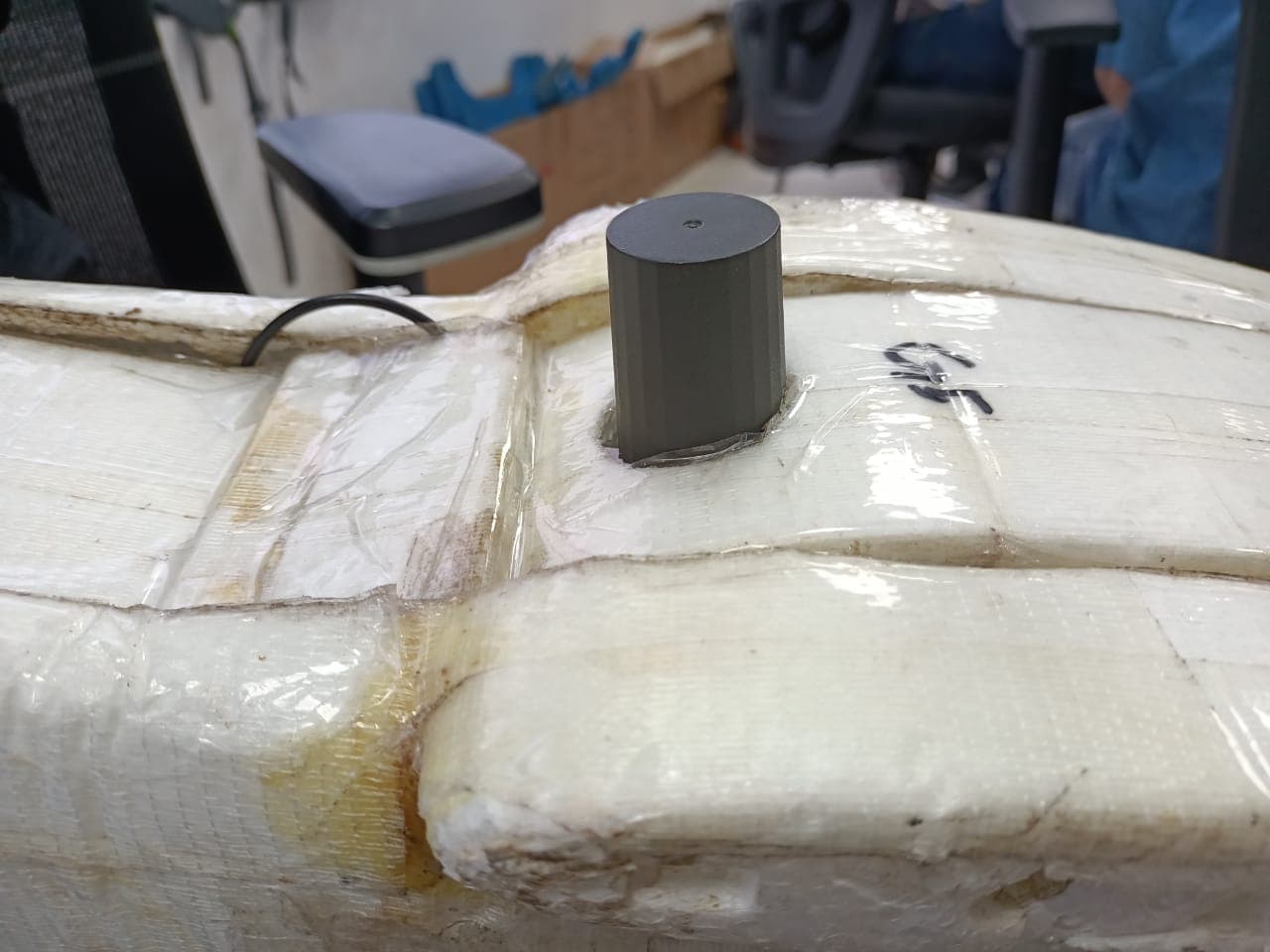
This time M2 was mounted as in this below picture.
Day 1 all triggers were matching with the camera images.
Day 2 again missing (day 2 flights were conducted in a different location where it is more open ground).
What could be the possible issue regards with this 2 days flights?
Why is this M2 Behaving proper on Day 1 and not on Day 2.
This issue is prolonging a lot which is eating our time drastically.
Yes as you suggested, we did check time marks on ground. even though M2 is installed in drone we are getting all time marks as number of images triggered. when Drone is in flying that is when we are missing these triggers.
For your information we are using a 5V BEC to power M2 unit there is no connection between M2 and the flight controller.
I’m tired of doing all these experiments. I have seen other companies who have mounted M2 beside flight controller and same settings, they are doing fine with all the flights no missing time marks. (their Drone is same as mine with all the other electronic components).
Give me any other last steps to carryout testing or send me some replacement units/refund from KK sales.
From your images, I think you still have a few things that can improve your chances of success:
your M2 unit is right next to the flight battery. The high-amp draw from the battery causes quite some RF-noise. The M2 need to as far away from things like ESC, battery, and RC-receiver and antennas (if you use telemetry).
take out the antenna and m2, and verify the signal integrity by collecting an hours worth of data in good conditions, and then checking SNR/cycle slips.
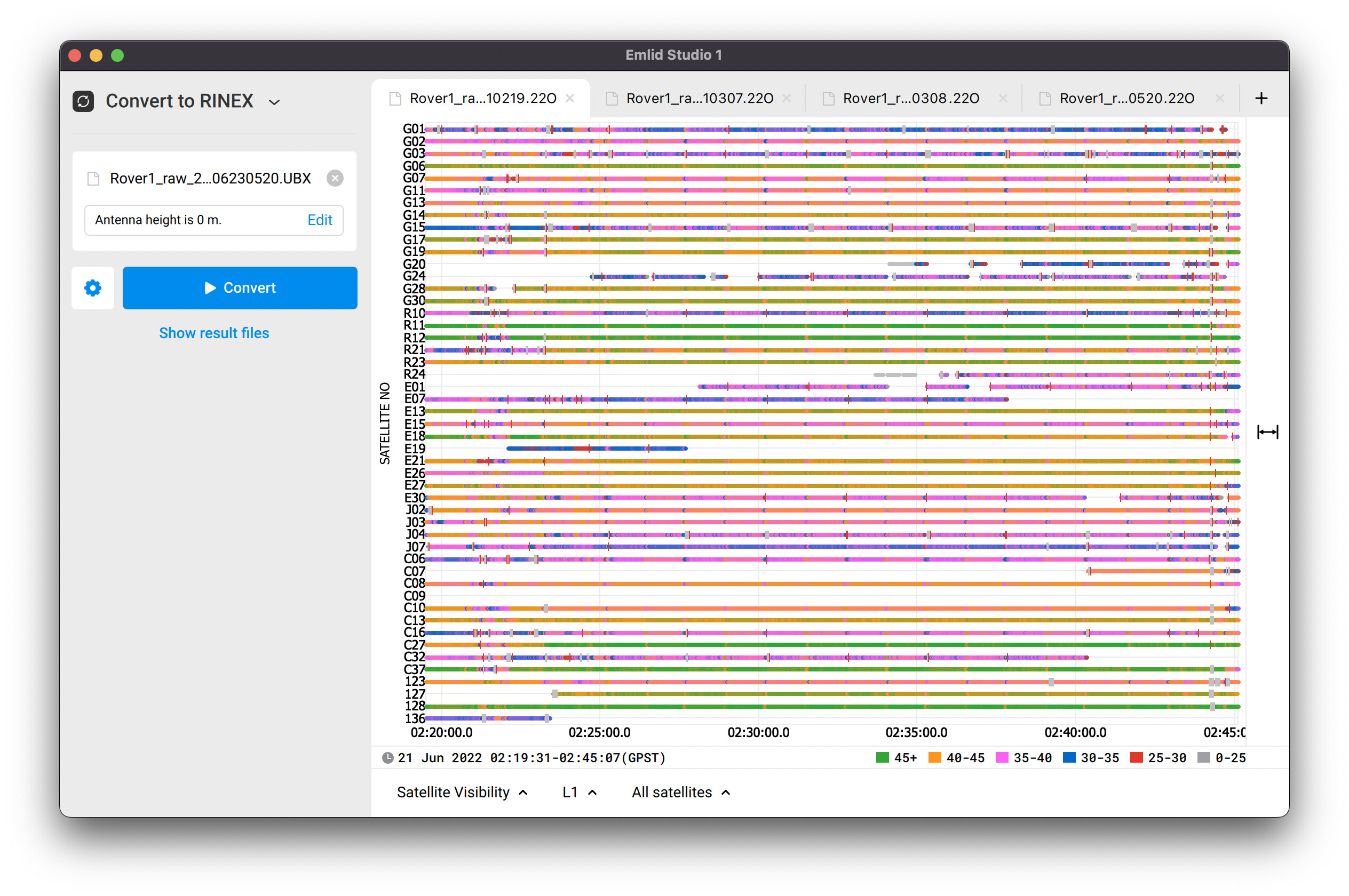
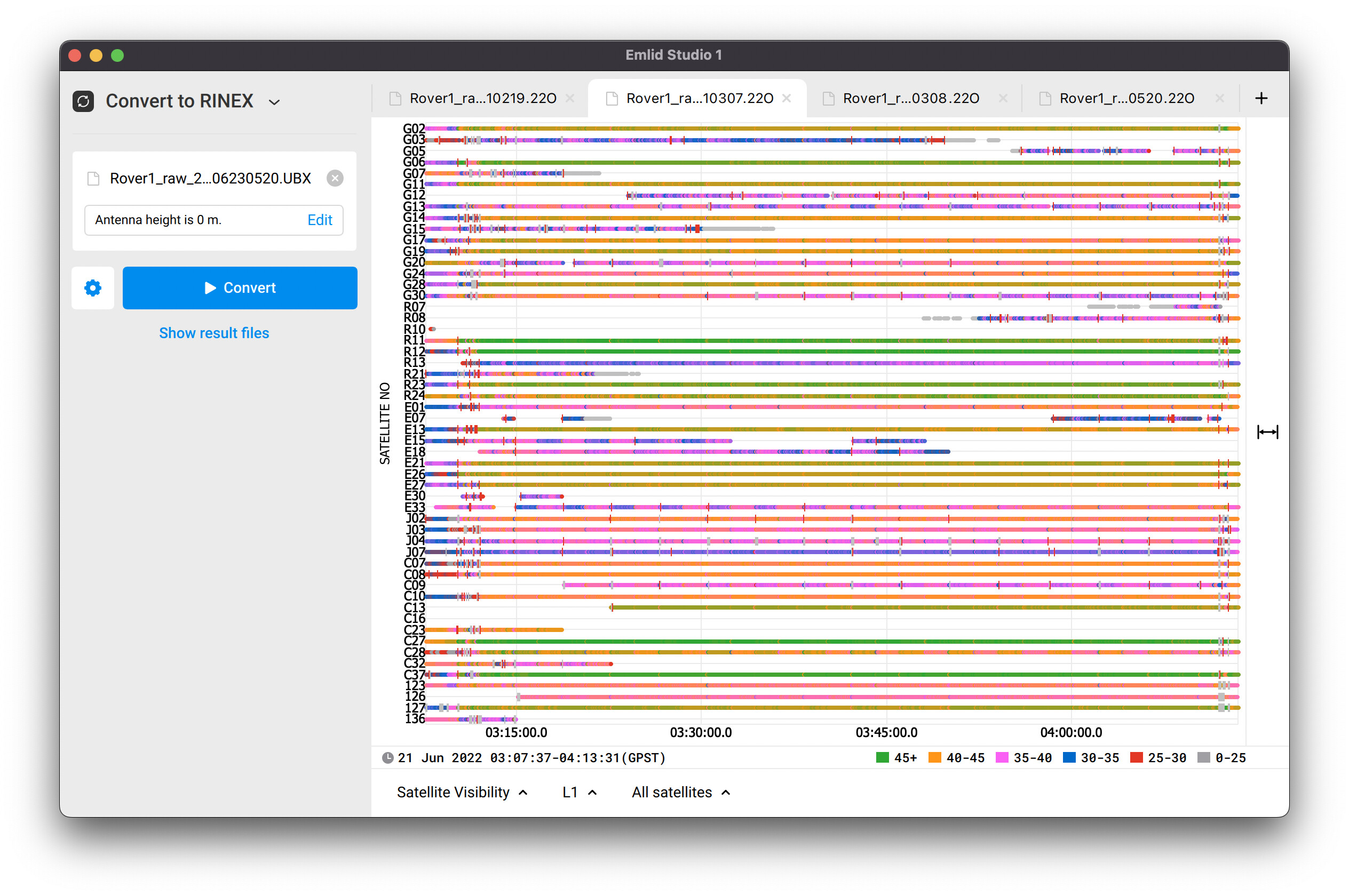
The missing time marks issue is floating. It doesn’t matter that you’ll face it constantly. It may appear in some cases, may not. Despite the first day’s log being slightly better, it’s still full of cycle slips and periodical SNR changes.
It confirms my suggestions. When the drone is on the ground, some electronics are probably turned off. Once it takes off, it starts and causes RF noises.
I also agree with @wizprod’s comment on the battery location. You need to place Reach as far as possible from it and wrap it with foil. It may help avoid such issues.
Tell me how much distance should i keep M2 device from all the interference causing electronics? Why is this not mentioned on the EMLID website to wrap M2 with foil, what if it generates more heat and damages after wrapping with foil?
Every DIY drone has different electronics and a unique hardware setup. Hence we don’t give exact recommendations regarding Reach’s location.
As for the foil, we have mentioned it in one of our guides. In general, you need to eliminate interference to avoid cycle slips, and it can be accomplished not only by wrapping the foil. I also don’t remember any cases when the foil was so overheated that it damaged the device.
You can conduct the tests with different Reach locations, and we are always ready to help you with analyzing and choosing the best setup option.
My issue is still not resolved, Yes I am aware of all the drones are different.
What are the permissible SNR value which this device is sensitive of?
Will get some EMI & RF meter to test interference and find a suitable place to mount on the M2 device.
There would be a distance/number stating that for so and so… voltage and so and so… current carrying conductor distance of interference is so and so inches/feet. if you have any such value or number much appreciated.
I see that firmware 29.2 has been released, when will I see this Missing events issue fixed in these updates?










{kind=link}