Okay, so now I found a little time to process the files again. I’ll describe step by step what I did’t, let’s see if there is room for improvements:
1. Get the static coordinates of the Reachbase
% program : RTKPOST ver.2.4.3 Emlid b27
% inp file : C:\Users\wittich\Example\Base\out\raw_201711221559.obs
% inp file : C:\Users\wittich\Example\IGS\obs\2017\326\WIND00NAM_R_20173260000_01D_30S_MO.rnx
% inp file : C:\Users\wittich\Example\Base\out\raw_201711221559.nav
% obs start : 2017/11/22 15:59:51.8 GPST (week1976 316791.8s)
% obs end : 2017/11/22 18:31:45.4 GPST (week1976 325905.4s)
% pos mode : kinematic
% freqs : L1
% solution : forward
% elev mask : 15.0 deg
% dynamics : off
% tidecorr : off
% ionos opt : broadcast
% tropo opt : saastamoinen
% ephemeris : broadcast
% navi sys : gps glonass galileo
% amb res : continuous
% amb glo : off
% val thres : 3.0
% antenna1 : ( 0.0000 0.0000 0.0000)
% antenna2 : ( 0.0000 0.0000 0.0000)
% ref pos :-22.574920442 17.089431707 1734.6752
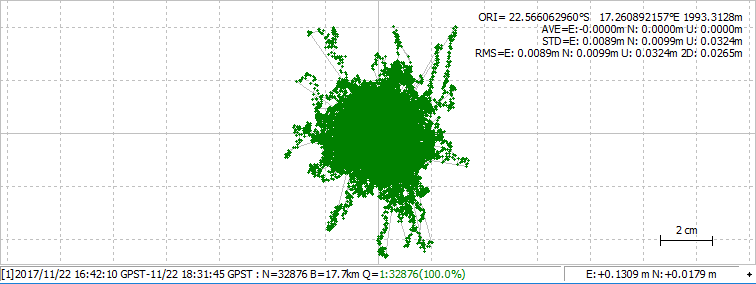
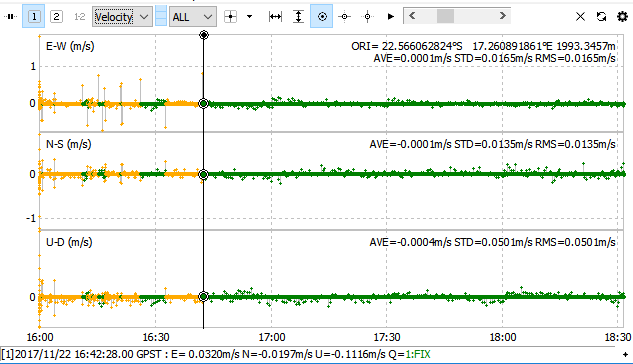
2. Then I got the static average (like described here). I got the following average Reachbase coordinate: -22.566062960, 17.260892157, 1993.3128
3. I processed the Reachrover data with the “new” Reachbase and the following settings:
% program : RTKPOST ver.2.4.3 Emlid b27
% inp file : C:\Users\wittich\Example\Rover\out\raw_201711221613.obs
% inp file : C:\Users\wittich\Example\Base\out\raw_201711221559.obs
% inp file : C:\Users\wittich\Example\Rover\out\raw_201711221613.nav
% obs start : 2017/11/22 16:14:20.2 GPST (week1976 317660.2s)
% obs end : 2017/11/22 18:47:18.6 GPST (week1976 326838.6s)
% pos mode : kinematic
% freqs : L1
% solution : forward
% elev mask : 15.0 deg
% dynamics : off
% tidecorr : off
% ionos opt : broadcast
% tropo opt : saastamoinen
% ephemeris : broadcast
% navi sys : gps glonass galileo
% amb res : fix and hold
% amb glo : off
% val thres : 3.0
% antenna1 : ( 0.0000 0.0000 0.0000)
% antenna2 : ( 0.0000 0.0000 0.0000)
% ref pos :-22.566062960 17.260892157 1993.3128
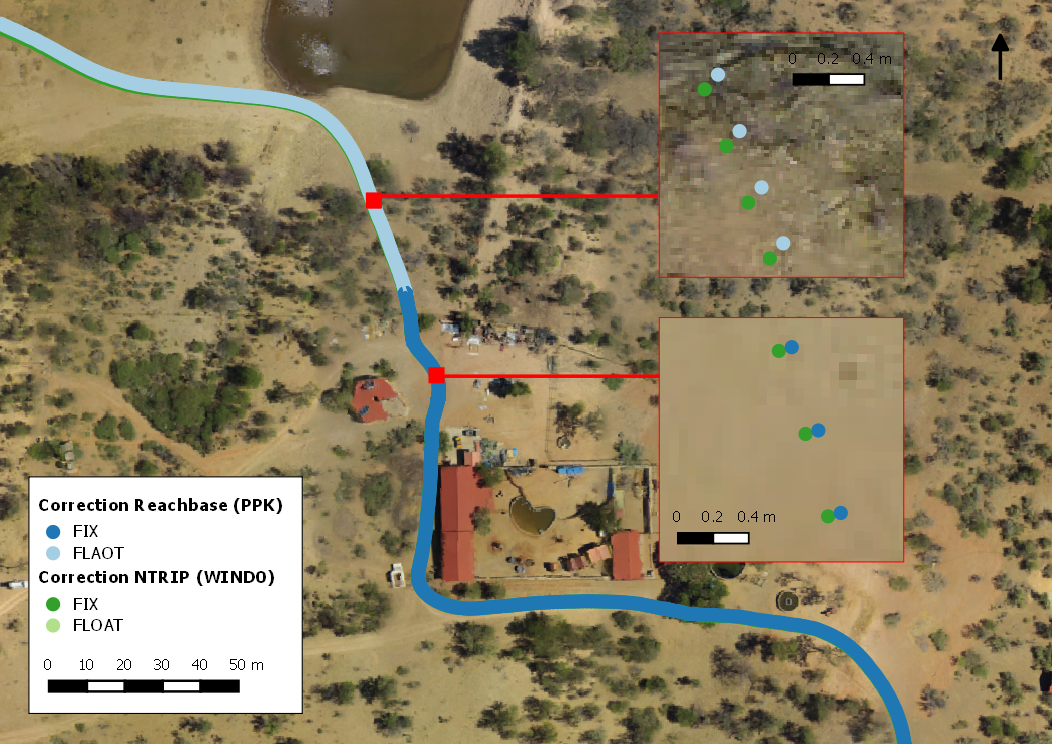
4. Now I compared again the data (I processed them with the same settings from above). The result is much better.
From what I can measure by hand the difference is much better:
- FIX < 10 cm
- min. 1 FLOAT ~ 30 cm
Will just running some statistics to see what are the “real” difference in numbers, but from what I can see like this its totally in an acceptable range.
So basically the problem was that I got the Reachbase coordinate in first place from the RINEX header position (which is the one from the field, right?). Locking into the Reachbase signal, I saw that it took over 40 minutes to get a steady FIX. And now I remember that I might have just FLOAT the average in the field 'cuz it took forever…
Anyhow, finally the map with details looks much better. Thanks for the help @TB_RTK and @bide