Olá!
Estou avaliando a capacidade de usar o receptor M2 como base e me deparei com algumas características que gostaria de compartilhar.
A metodologia foi ocupar um marco de coordenadas conhecidas e comparar os desvios RMS de posicionamentos RTK realizados com relação a três estações-base da rede RBMC-IP: (1) distante cerca de 18 km; (2) distante 200 km e (3) distante 500 km do marco.
Foram obtidos dois conjuntos de resultados:
(1) gerados diretamente do receptor pelo REACHVIEW 2.22.4 (conjunto LLH);
(2) obtidos via RTKNAVI (V. DEMO-5 B33-C) em um PC Windows 10; na mesma rede WIFI em que o receptor estava (conjunto NAVI).
Foram utilizadas duas antenas, uma helicoidal da marca Tersus modelo AX3705 AX3705 GNSS Antenna | Tersus GNSS (TERSUS) e outra da marca Navspark modelo GRADE ANTENNA - http://navspark.mybigcommerce.com/survey-grade-antenna/ (GRADE), ambas captam sinais dos sistemas GPS (G), GLONASS (R) e GALILEO (E) de dupla frequência.
Realizei 7 ocupações de cada antena em realização RTK com cada base RBMC (…) ao longo de 1 hora cada, em horários diversos com a taxa de frequência de 1hz; totalizando 42 ocupações e mais de 350.000 realizações RTK.
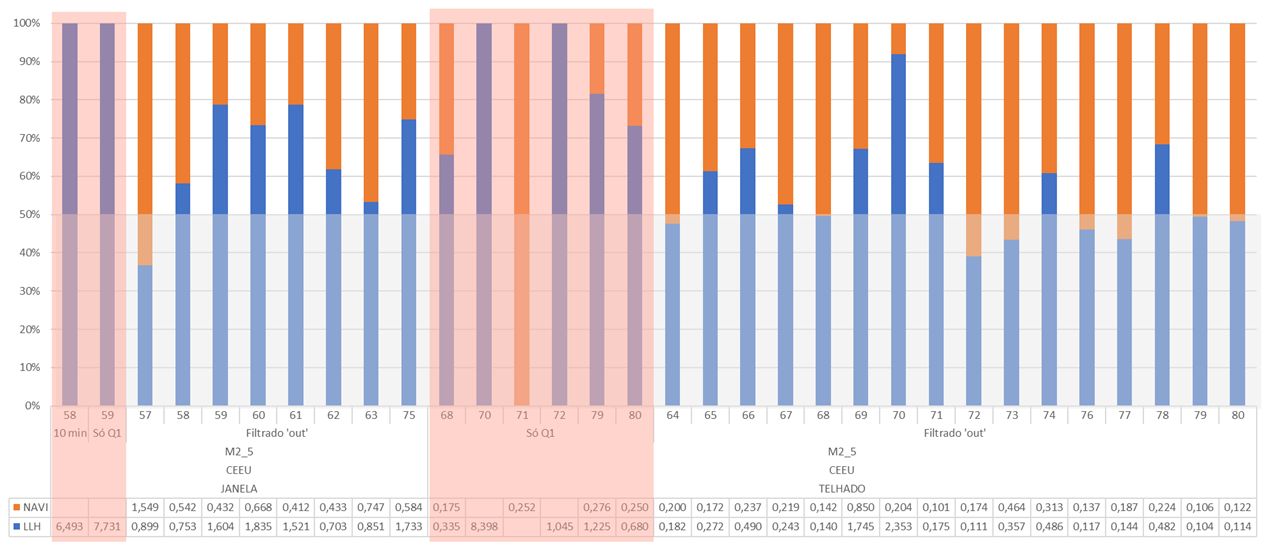
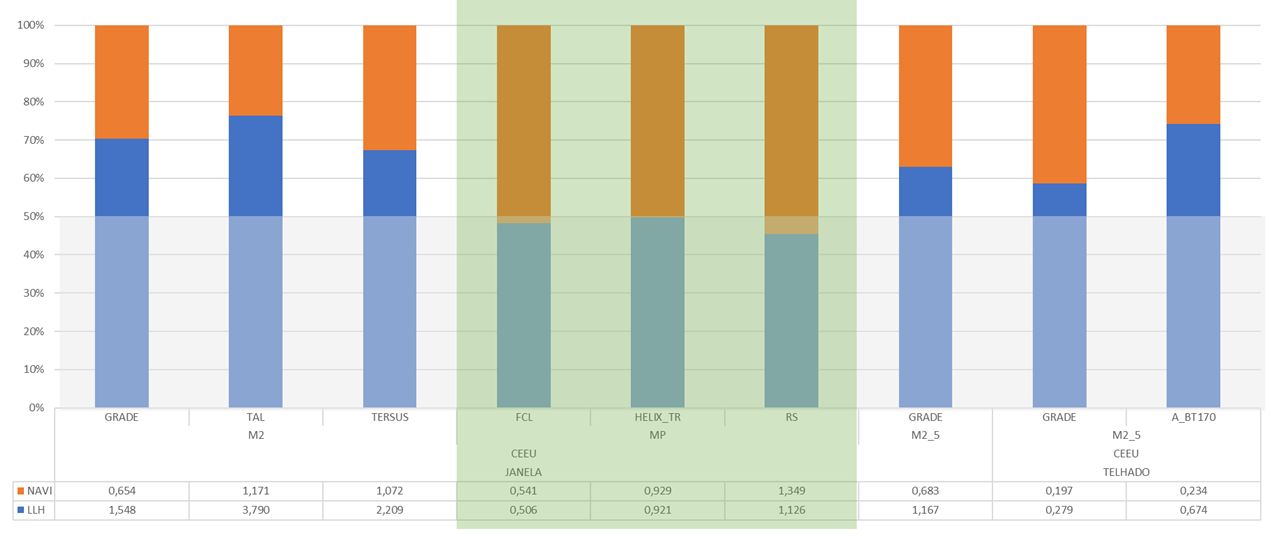
De cada ocupação foram obtidos os valores de dispersão RMS dos vetores E-W; N-S e U-D do posicionamento com relação às coordenadas conhecidas do marco. Tais valores foram tabulados e permitiram avaliar a dispersão das soluções obtidas em cada processamento, gerando 84 conjuntos de dados de variação de posicionamento, 42 LLH e outros 42 NAVI.
O que chama a atenção é a diferença entre a qualidade do posicionamento dos resultados LLH em comparação aos NAVI: em média, o desvio RMS obtido pelo processamento direto no receptor (LLH) é cerca de duas vezes maior do que o do conjunto NAVI, obtido no PC (…) sendo que para a distância-base mais curta (~18km), o efeito é bem mais notório!
A figura abaixo apresenta as médias tridimensionais das dispersões RMS dos vários levantamentos em relação às distâncias-base. Os diâmetros das circunferências indicam a medida do desvio-padrão das médias.
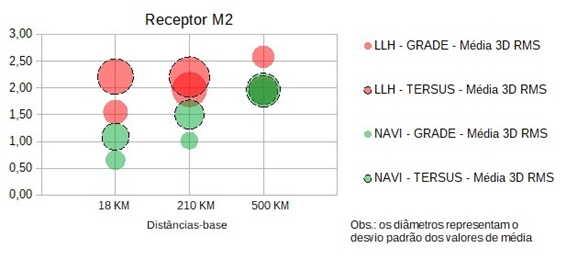
Independente da antena (TERSUS ou GRADE) os resultados LLH (em vermelho) são piores que os obtidos no processamento NAVI (em verde).
Para a distância base de 500 km a diferença é menos perceptível – pode-se obter resultados similares com o conjunto LLH ou NAVI (…) já para uma distância de 18km, caso se utilize somente os dados LLH, imputa-se o dobro de erro do que se usasse um PC com o RTKNAVI.
A mesma sistemática está sendo utilizada para avaliar os receptores M+ (MP) e o ANTIGO REACH (AR) com antenas de simples frequência.
Os dados preliminares apontam que a diferença, nos receptores de simples frequência, não passa de 10% e sem uma tendência (hora o conjunto LLH é melhor, hora o NAVI… indicando que a diferença pode ser causada por outros motivos: geometria dos satélites, qualidade das antenas, etc…)
A minha intenção seria utilizar o M2 sem a necessidade de um PC – gerando soluções RTK diretamente do Reach View (LLH)… mas diante dos resultados, parece que necessitarei de mudar minhas intenções!
Espero que as próximas versões do Reach View possam tratar melhor as soluções RTK e gerar dados mais acurados.