I do not use topcon magnet field, but FieldGenius, so I assume you would need to select the proper coordinate system you need to use for your region for easting, northing and elev. Then set your units to meters.
You’ll have to consult Topcon manuals, youtube videos, topcon forum, etc for further details using the topcon software.
Hi. You need to set up base and Rover (as normal). You will not connect base station to your Topcon Data Collector. All your correction calculation will be done on your Reach RS. Set Rover “Position Output” to bluetooth and Pair it with your Data Collector. Set Rover Position Output format to NMEA. Update rate 5hz. You will have to create a new “Connection” in Topcon Magent Field and set it to “Generic NMEA.”
Hi Brent,
Thanks for your response. I did setup like this:
Set up base and Rover (as normal) using smart phone Reach RS app.
Base antenna does not need to be connected to the Topcon Data Collector, because all correction calculation will be done on the Reach RS.
On the Reach app, Set Rover “Position Output” to bluetooth and Pair it with the Data Collector.
Set Rover Position Output format to NMEA.
Update rate of rover should be 5hz.
Create a new “Connection” in Topcon Magent Field and set it to “Generic NMEA.”
I can confirm that base rover talks with each other using the phone app. But, was not able to work on Magnet Field. It wasnt stpring the point. I also had intermittent connectuon issues.
I’m going to try again this week and post my feedback.
Hello,
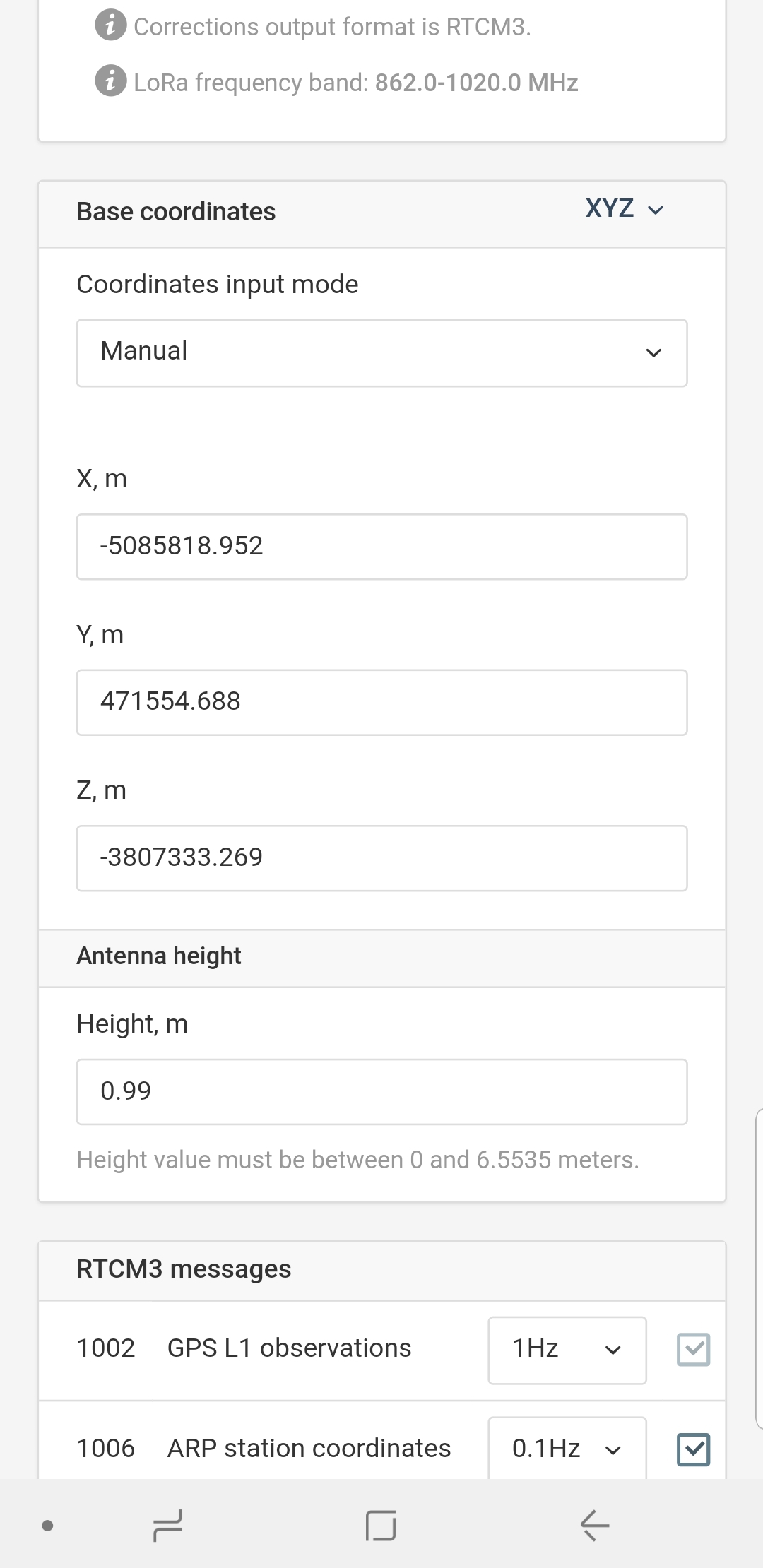
I tried to enter the base co-ordinates, but, it was already displaying strange co-ordinates (see attached screenshot). Even if I change the XYZ to LLH it’s showing the same co-ordinates.
When I force the Easting Northing and elevation for the site I was testing, it says that the base rover distance is 5,000m apart approx; in realty it was only 4-6 m apart.
On the base, under configuration input mode, when I try to use the Fix & hold option, I am unable to see any correction accumulation green bar which generally indicates that it is acquiring a fix solution. But, it doesn’t show up.
Very interested to see if you get this working.
I have an fc500 running topcon field and would love to find a cheaper solution to what now seems like an extortionate price topcon charge for rover n base.
Hey Mark, I’ve had it working so I can confirm that it’s possible but I guess I should do a video guide. I’ve had it running on my FC-500 via bluetooth and Magnet Field Software. I tested it using hybrid positioning with my LN-100 total station and Emlid RTK GPS. It seems like there’s a little more discussion around Topcon recently.
Hey Brent.
That’s great to know.
On my fc500 I don’t have the gps software module purchased.
Do you have that module on yours, is it necessary for using the Reach units.
Do you need some kind of licence to some service to get the position corrected.
Sorry for all the questions, the prospect of getting a working Gps set up for just £1500 has got me all excited.
No you don’t need gps module. And no you don’t need any license to correction service. What you need to do is set up a new connection under Connect menu in Magnet. You are given several options, including generic nmea. This is the one you want. The tricky part is getting Magnet Field to look for the nmea string at the right port. I think possibly it looks at port seven.
Under your Bluetooth connection settings outside of magnet software you will have to forward the nmea string from reach to the correct port on fc 500. I suggest documenting this step and sharing it with the community as well as your own records. I did some trial and error at this stage. Good luck!
Thanks Brent. Just gotta wait till they get more in stock.
Are you able to use an easting northing configuration with the data collected or are you stuck with lat long.
I was only able to get it to work using Single Average mode on the base. Rover works fine but, goes in float mode.
Ideally, I am trying to set up base and rover in such a way that the Base uses a known co-ordinate and rover gives fixed solution.
The weather has been wet so haven’t had a chance to step out again.
Will post my feeedback and setup as soon as I get it working.
Moving into this from another thread I had created.
Basically I am at the point that I have to localize before I can shoot any accurate points related to my local coordinate system. I cannot get the Reach/Magnet setup to measure the known points in order to create the localization. The tutorials available do no set you up to work in this manner so it is going to have to be figured out.
maybe there is a chance. you set only on rover. Select atleast 2 points in wgs coordinates then in your local coordinate measure that 2 common points to localize. Please watch the link you tube
did you manage your Reach rs (ROVER) and your data collector to communicate? Do you have a coordinates of your local points? if you have then, you can do localization but you have also to observe that the points in order to get the wgs coordinates. Save that wgs coordinates and your local coordinates of the point. Then, perform localization