I don’t understand the point of these instructions.
WHY would I want to connect my reach and my iPhone to my home wifi network. I have a pair of RS+ and I unwittingly had it set up like this at my house to see if I could get NTRIP to work and then when I was out in the field, trying to connect to the NTRIP service, I had no mobile data whenever I opened up the Emlid flow app to connect to one of the receivers, via WiFi.
Please clarify the set-up, in the field, away from my house and my home WiFi. I need my phone to connect to the internet to get NTRIP connections for the base. The base and the phone need to communicate NTRIP corrections - how? WiFi or Bluetooth. The Base communicates to the Rover with LoRa - got that. I need the phone to connect to the Rover with the Emlid Flow app so I can record points - how? WiFi or Bluetooth. If I connect to the receiver WiFi hotspot with the phone, then how is that receiver then connecting to the phone to get data from the internet? Can all of this even be done simultaneously? What am I missing?
Those instructions are just to get you started and enable your receiver to receive firmware updates if available. You don’t HAVE to connect to your home wifi. You can set up your receiver to connect to (most) any wifi that is 2.4ghz. If your goal is to receive NTRIP corrections, you can configure your RS+ to connect to your phone’s wifi hotspot. In the field, turn on your phone’s hotspot and then start the RS+ and it will connect to the phone’s wifi hotspot if you have it set up to do so. Then you open Flow and select the receiver. You can then use your RS+ in any manner you wish, including receiving corrections over the internet, providing your phone has a data connection. Make sense?
No, this does not make sense. If I am using Emlid flow on the phone to connect to the receiver, via WiFi, to configure the receiver to connect the phone via WiFi, which is already connected via WiFi to the receiver, it does not work. How do you simultaneously connect two Wifi hotspots TO each other?
You do not use simultaneous wifi connections. One at a time.
When you get your receiver, it has no way to know about any wifi connections you may use. So, you first connect to the receiver by using it’s own wifi. When you are connected, you then set up the wifi connection(s) you would like the receiver to look for when it starts up.
After you go through the set up, you turn the receiver off and turn it back on, and it will look for the wifi connection you just set up. For example, your phone’s wifi hotspot. Then you connect and control the receiver from that connection, not the receiver’s own wifi. The receiver’s wifi is a fallback if the receiver cannot locate any wifi connections you have specified.
By the way. This is the same way most wifi devices like smart switches, security cameras, etc. work. You first connect to their wifi and then set them up to find your specified wifi.
You are correct. But given this set-up, connected to mobile data, you should also be able to receive firmware updates. So why go through the exercise of connecting to home internet, and then having to set up WiFi connections differently for working out in the field. The instructions that Emlid provides are redundant and confusing, and frustrating. Sorry, but we are not all network geniuses such as yourself.
OK, so next question. The Rover appears to be connected to the phone hotspot and I can pull up the Rover in Emlid Flow. The Base reverted to hot spot mode.
I have the Base receiving NTRIP corrections and the Rover receiving corrections from the Base. Is this not how it supposed to be set up? When I pull up the Rover status, I can see grey bars next to the GPS satellites, but not GLONASS, which tells me that the Rover is receiving GPS corrections from the Base. However, under coordinates and precision, it is showing a precision of 30m. It has sat like that for 10 minutes - the averaging time that I set in the Base - and not improved. Supposedly the Base is receiving NTRIP corrections to correct the base position, but it is not showing anything for the baseline or base position under ‘Corrections’.
If you need to set up your base coordinates with centimeter-level accuracy then connecting it to the NTRIP service is the right step. If your base position is constant, then it’s enough to average the base position in FIX status and turn the NTRIP corrections off. You can take a screenshot of the Base mode page with the final coordinates or write them down on a piece of paper to save it for a future survey.
Once the coordinates are averaged, your rover receives the accurate base’s position and calculates its own position accordingly.
That’s right. The grey bars on the Status page of the rover indicate the signals received by the base. If there are no bars for GLONASS, it’s probably because the 1010 RTCM3 message with GLONASS observations isn’t transmitted from the base.
What was the solution status on the receiver with such accuracy?
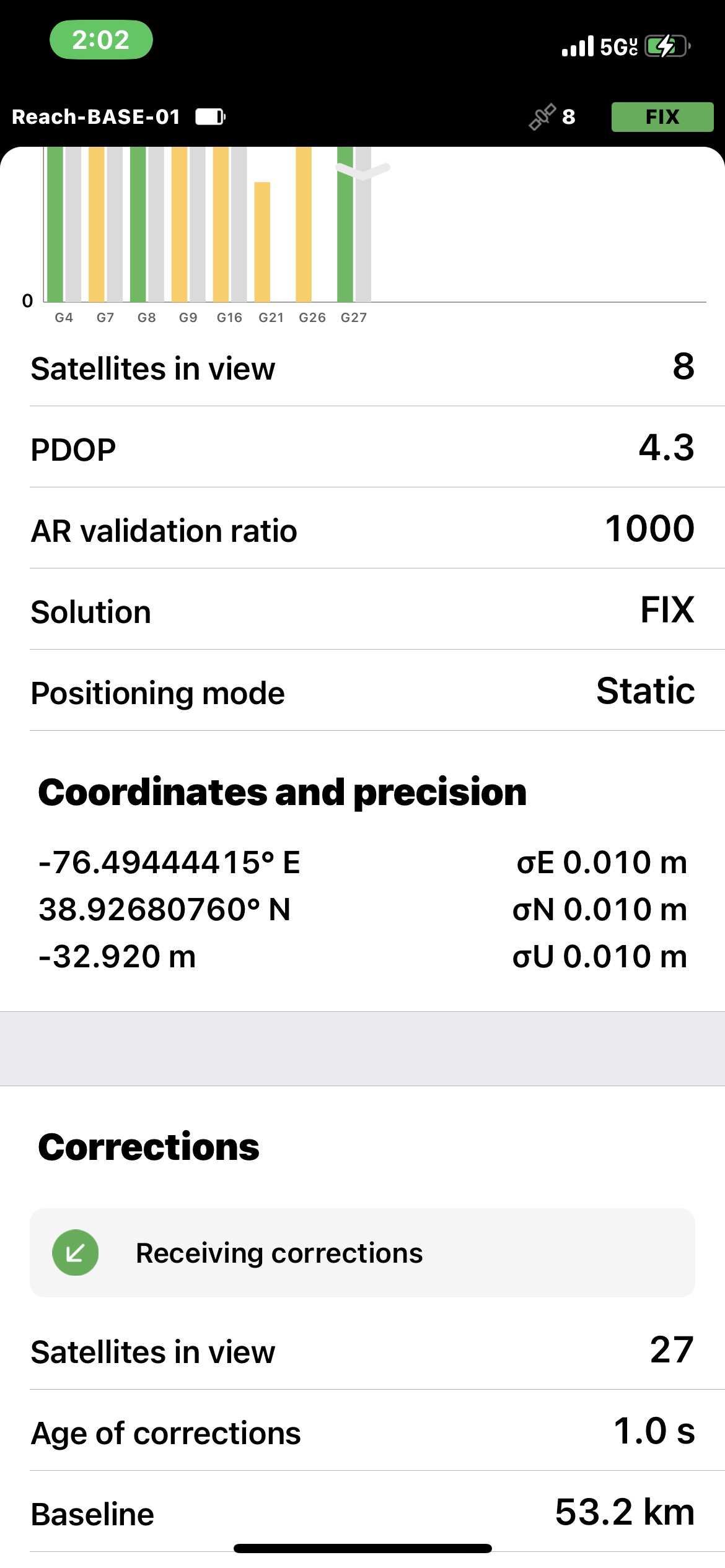
Was the Receiving corrections status on the Corrections input screen shown like on the picture below?
I got both units communicating with my phone hotspot. Helpful connectivity tip for users: turn off bluetooth.
I was able to establish my local Base coordinates accurately using NTRIP. However, this does not hold the coordinates, and it will bounce out of Fix mode back to Float. The Base receiver either knows where it is to centimeter accuracy, or it doesn’t. Why won’t it stay fixed?
In your image, the baseline is longish and coupled with the poor PDOP (geometry of available satellites in the sky) your continuous averaging is going in and out of FIX. Normal.
Like @michaelL mentions, get a good observation via NTRIP for your base, and then use that coordinate. NTRIP for your base is done.
Why is that a feature and not a bug? It’s a static base. AR is 1000. It has either narrowed down it’s location to that accuracy, or it hasn’t.
You tell me. You would think the software would give the option to lock those coordinates with the push of a button. But if I understand the process correctly, I am supposed to manually write down the coordinates, switch the Base to manual coordinates and then enter them manually from my notes?
You can set an Average time, but so long as you have correction input turned ON, then it will continue to update it’s status in real time even after the point is averaged. It will not override, or re-average the point unless you tell it to. If you had it set to Average/Fix only, then that is what your point will be. But in real time, the status of the corrections can change. But it shouldn’t affect the point that was averaged.
What ‘status’ are you referring to? The coordinates and accuracy keep changing. Where do I find the coordinates that were averaged and held? Just turn off NTRIP and it is good? Where do I find this in the Emlid documentation?
In summary, this is what I do to collect a point to be used as a base point to send corrections to a rover.
Turn on and establish Input NTRIP corrections.
Open a project, or create one if needed.
Add a point. I name it “base”. Average/Fix for whatever time you want.
If the point is saved successfully, I turn NTRIP corrections off .
Open Base Settings and select Manual/Configure.
There is an option to select “Choose From Project”. Select the project you were just working in and select the “base” point. (or whatever you named it).
The coordinate will populate the base coordinate fields without having to enter them manually.