I searched docs and forum and saw many entries that were close but didn’t seem to solve my issue.
Detailed problem description. How does observed behavior differ from the expected one?
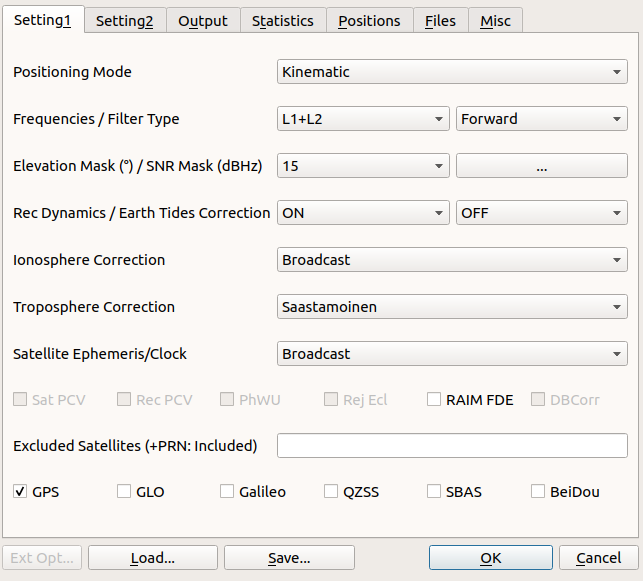
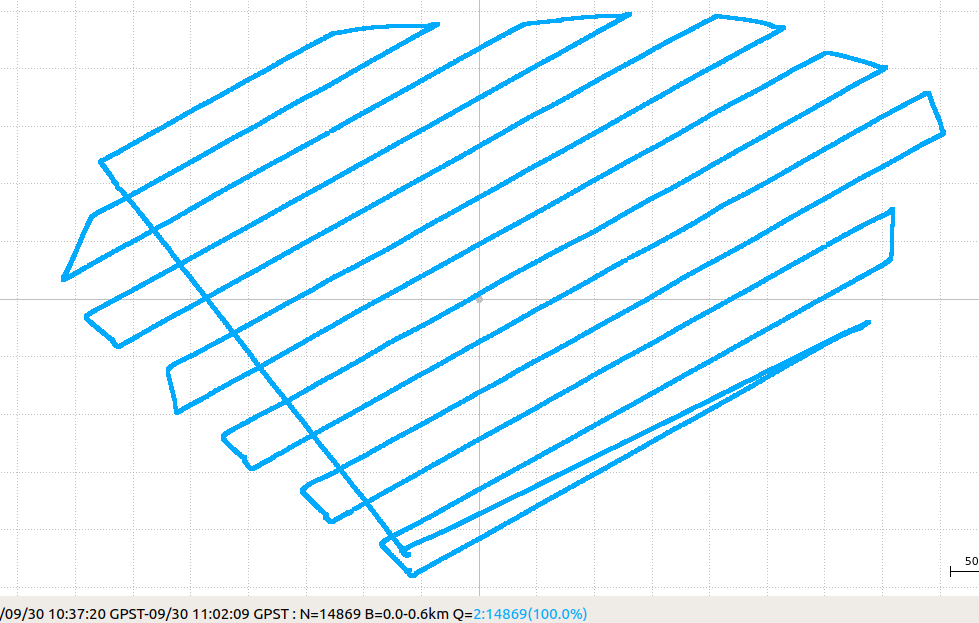
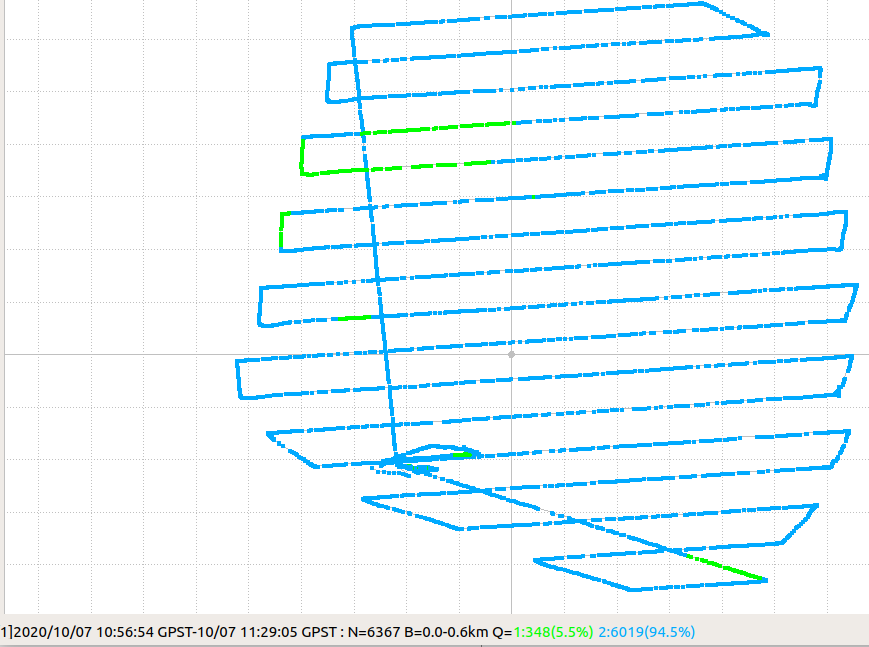
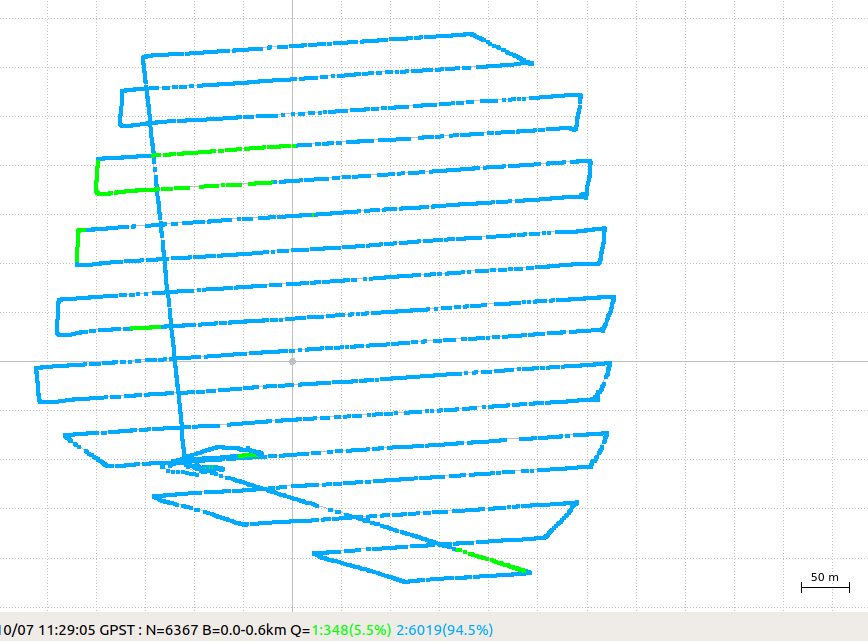
I was hoping to understand why I can only get Q=2 (100% of points float) in RTKLIB and not Q=1 (Fix) for the PPK solution in kinematic mode.
Data is from one UAV flight. Base recorded for about 4 hrs. prior to flight.
I tried the standard configuration I read on this forum and elsewhere for PPK with RTKLIB
I also tried to use 35dB SNR mask
I also tried to use combined filter type instead of forward
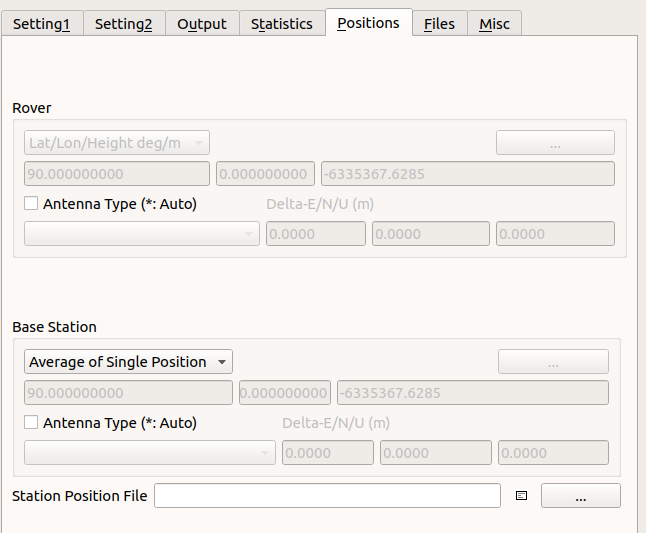
I tried to use “average of single position” or insert LLH for base.
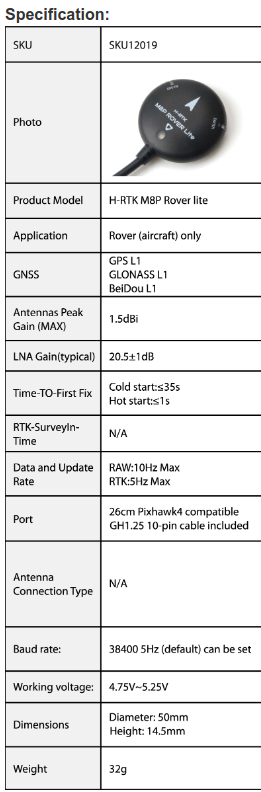
The RS+ base sampled at 5Hz
I used sp3 and clk files from IGS as well. It didn’t make a difference
I am using RTKLIB qt version 2.4.3 b8 on Ubuntu 18.04.
Base coordinates (LLH): 32.4009156909925, 34.9595945049029, 49.7153691799689
If anyone can take a look a I would really appreciate it. Also, when taking the data I did not accurately measure the RS+ height on the tripod so didn’t use this figure in the post processing. I didn’t this was the culprit but maybe I am wrong. The base location is shown in last image. There are no other RF sources nearby except the UAV COM. Trees around are about 3-4 meters in height.
Tnx for the good comment. I did try it without success and reverted to GPS-only since I saw some threads where people recommended to work GPS-only when they incurred fix solution issues.
I can always try again
I would select all constellations during the field survey. You could always filter out other constellations during the Rinex conversion and retain only GPS satellites.
It’s looks like you’ve got a large obstruction to the east if north is straight up. It’s imperative that L1 receivers have an absolute clear view of the sky, especially for the base receiver. This may be part of your problem
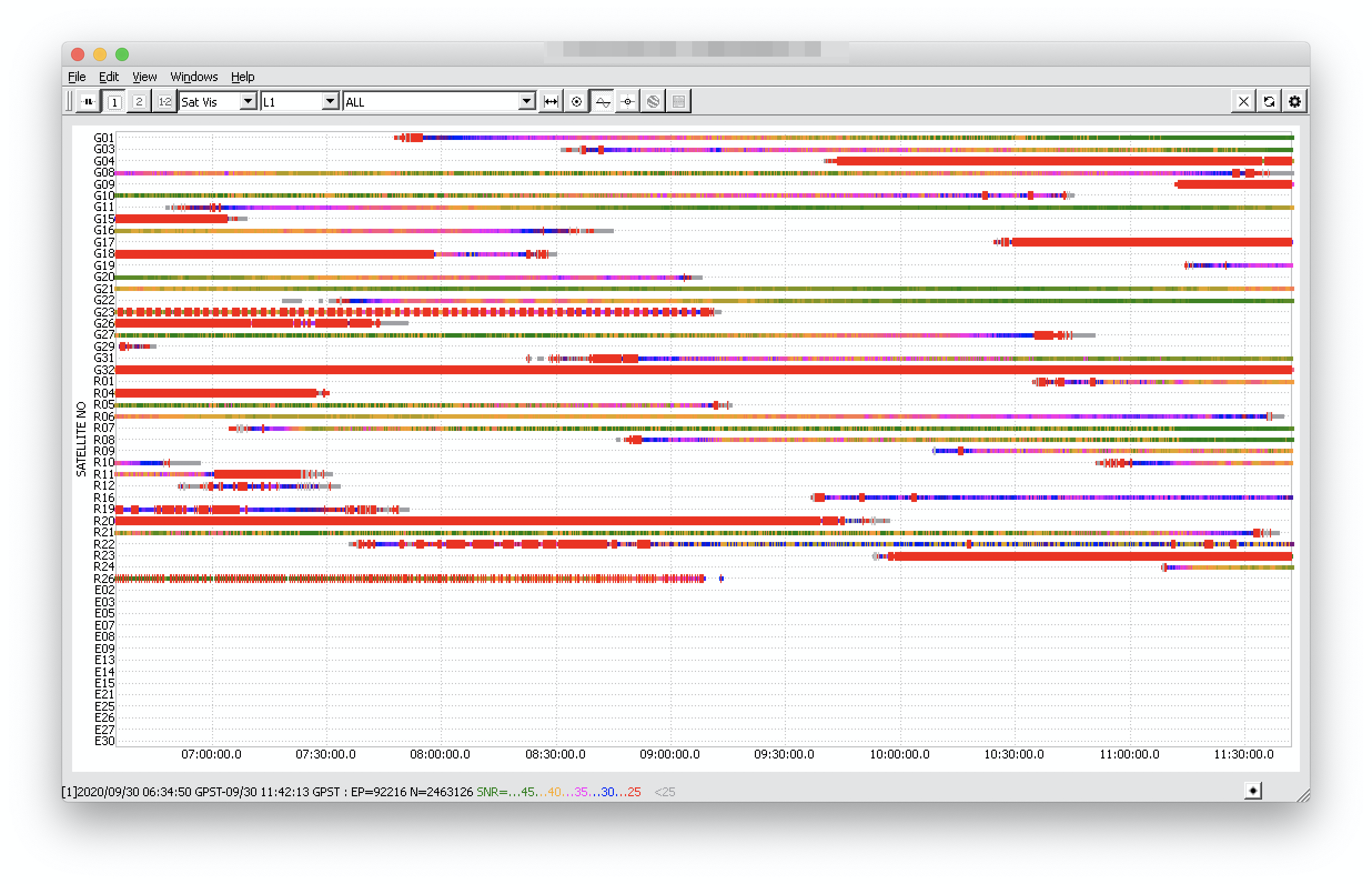
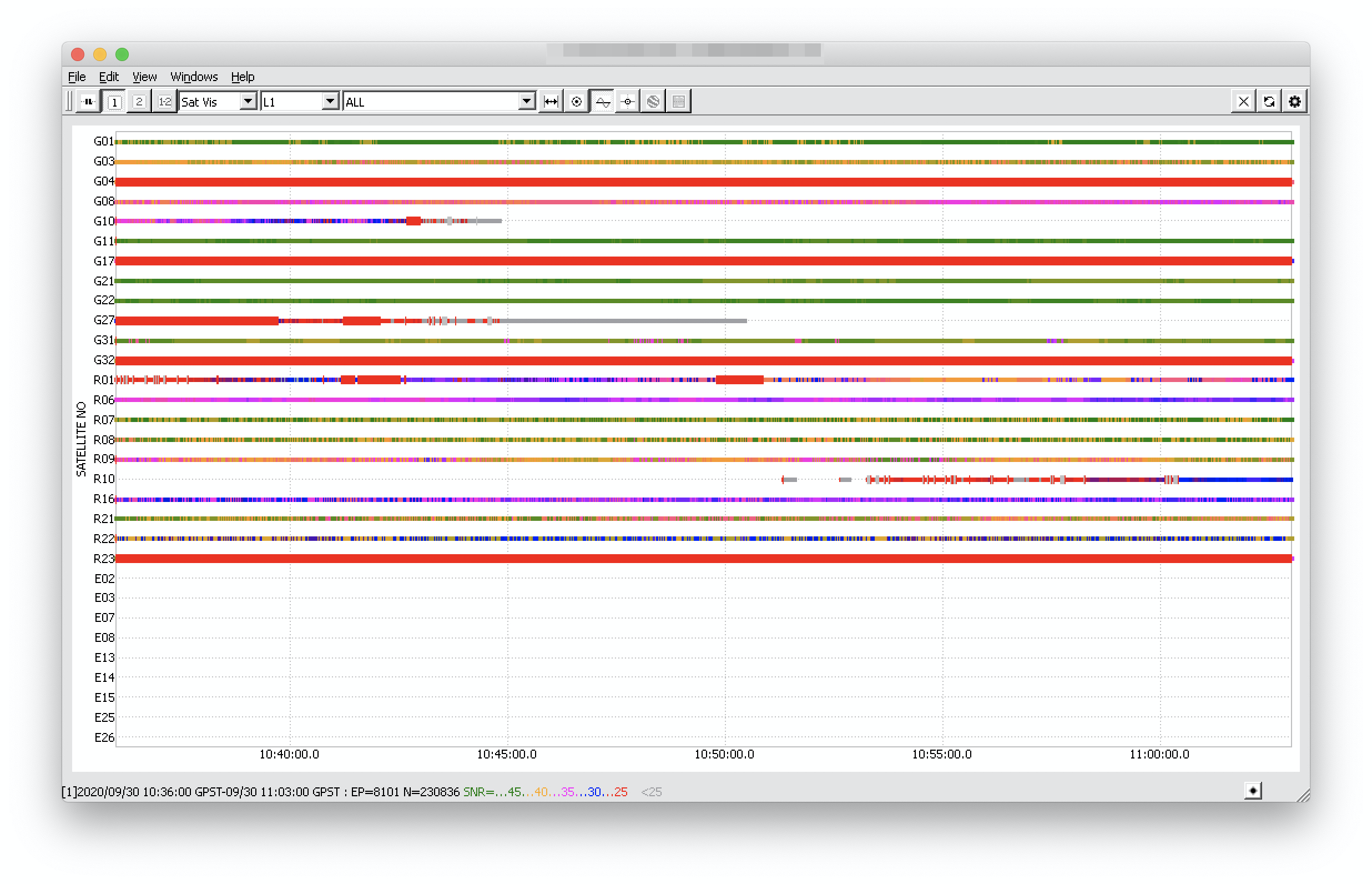
Thanks for a very detailed explanation of your survey and PPK workflow. I’ve looked through the observational data on the base and the rover.
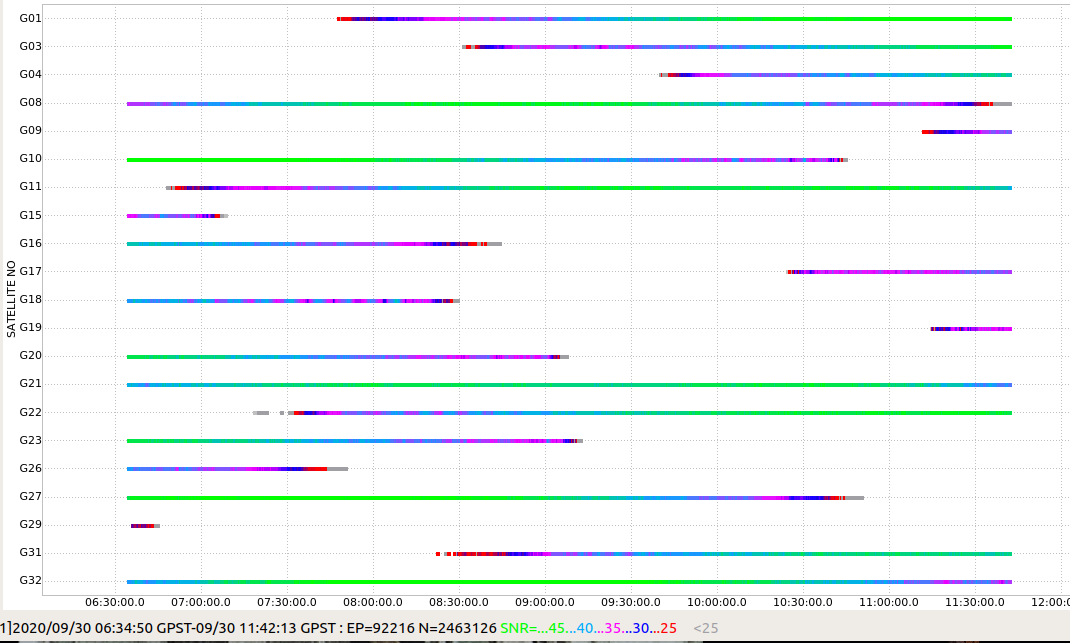
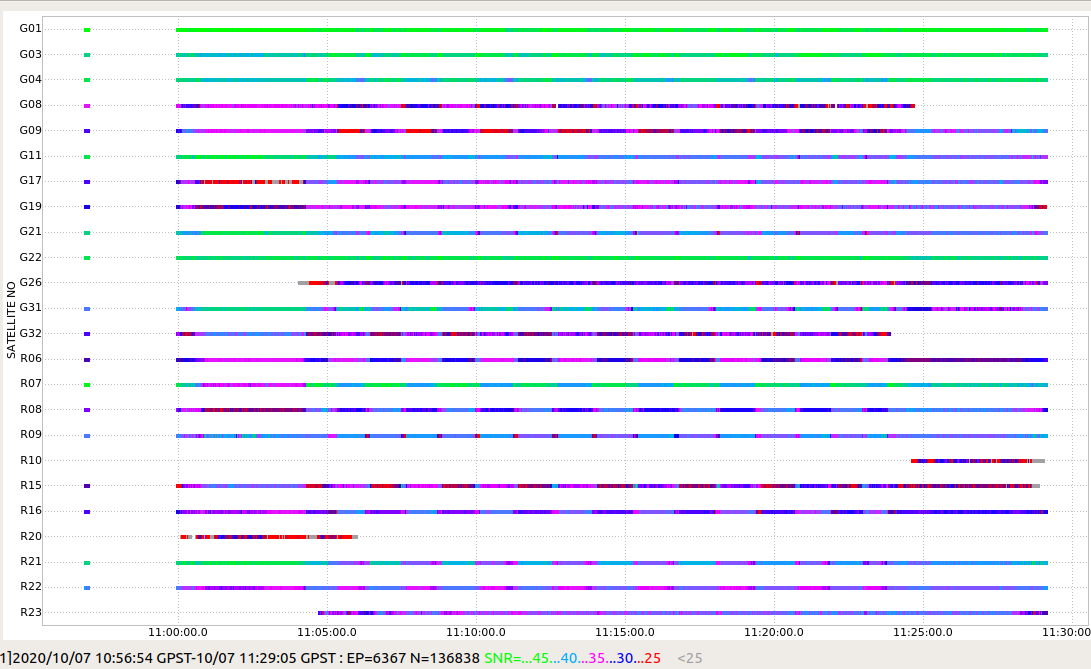
The data from the base is of extremely poor quality. You can check it on the first screenshot. The second screenshot is where I have set the time interval of the survey from the rover’s logs. The data shows that there are a lot of cycle slips in both GPS and GLONASS satellite signals. Cycle slip appears when the signal was disrupted, and Reach lost track of the satellite. Even though there are four satellites with high SNR (G01, G11, G21, G22), it wasn’t enough to calculate the Fix solution with other very noisy signals.
As Bryan has mentioned, the white construction near the place of Reach RS+ location might be the reason why you get these results. Reach RS+ is a single-band receiver, so it’s essential to make sure that the receiver is provided with a clear sky view 30 degrees above the horizon. Please check the placement requirements for RS+ for improving the results on the next survey.
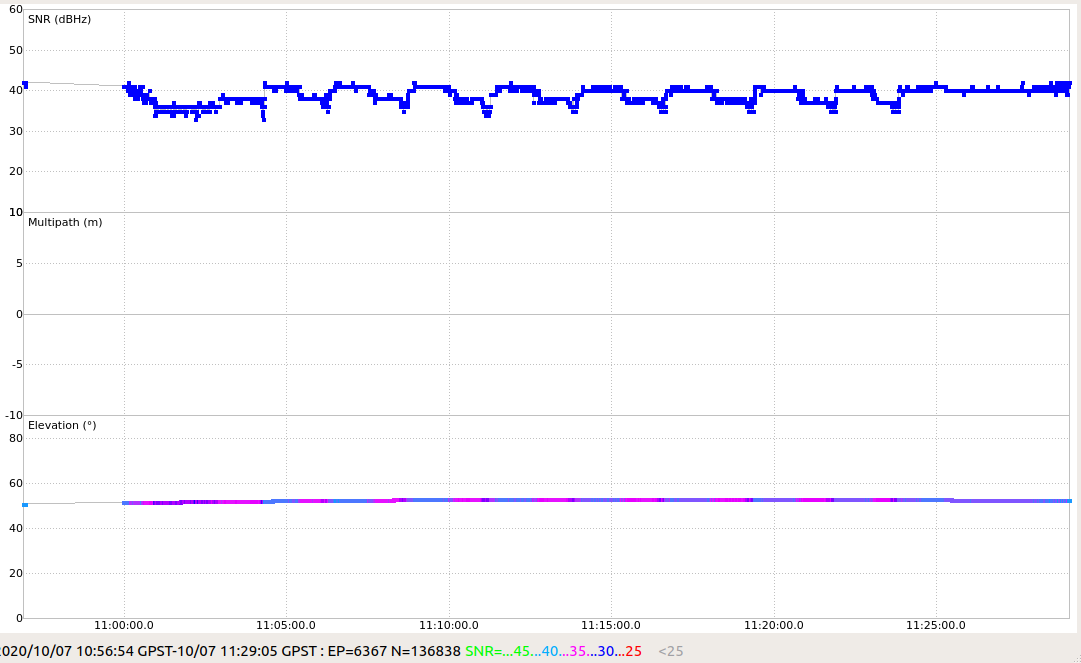
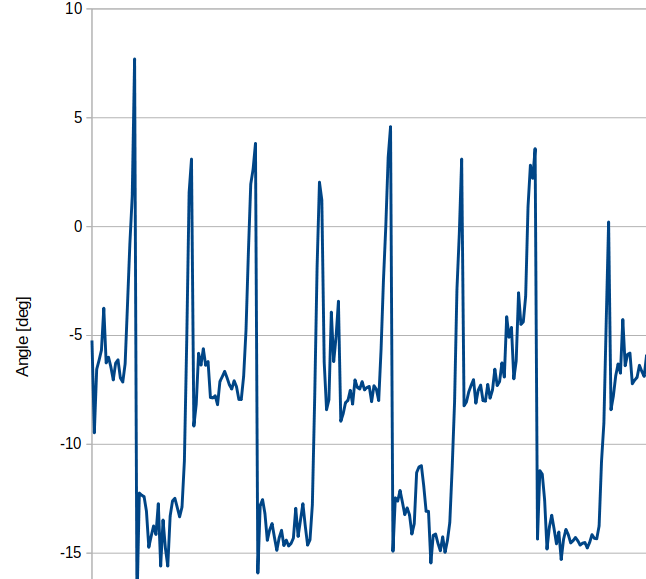
For the rover’s observations, I can see the same four satellites with a good signal as well (G01, G11, G21, G22). However, it’s important to note that the SNR values of these satellites change regularly between 45 and 40. The other satellites have lower SNR. So I’d recommend checking that the rover’s antenna isn’t blocked by the tall objects such as trees or electrical lines.
I think the bases have improved but rover is no that good. There are no obstructions to the rover as it is at 120m over an open farming area.
I was not able to get a solution at all, i.e. Q=0 for this set which I do not understand even for single solutions to both bases. I get Q=0 also when using either the RS2 or the RS+ in kinematic mode. I thought at least to see Q=2. I didn’t use sp3 or clk so far.
What is the minimal SNR one needs for a solid Q=1 solution?
I guess I am still looking for a good minimum SNR number to reach for Q=1 ?
Also - how would one improve the absolute accuracy of the Base (over 4 hrs I get slightly better than 0.5[m] and I hope for better than that on RS2) ? If you use a PPP service like here https://webapp.geod.nrcan.gc.ca/geod/tools-outils/ppp.php I would get in return a form of a position file. But that can not be used because in rtklib one needs obs files for PPK.
Would be thankful if someone would point to a guide for the above?
That sounds very likely! Not knowing what drone you are flying, but usually flying at 10 m/s sustained with a multirotor implies at least 30 deg of forward tilt. Then add headwind and so on.
That will significantly influence the SNR, especially on the sats below 45 deg on the horizon.
Others have tilted their antenna to a similar degree to compensate for this.
This is a rough makeshift testing config. circular plate was not present in previous data. Will have more data with the plate soon to try and isolate the SNR issue.
Amazed that you got ok-ish SNR without a ground-plane. With what looks to be LED’s and 2 extra cables, is that an active antenna?
Not having a groundplane for this sort of antenna makes for a lot of multipath possiblities. Not something you want to have.
I would assume adding the ground plane will work wonders, however, if you want something that doesn’t require a ground, look into the helical type antennas, like this one: Multi-band GNSS antenna - Emlid Store