found it:
this is my file for rtk kine…
do i have better rtk when i switch to 5hz? on base and rover?
rtkrcv options for rtk (v.2.4.2)
console-passwd =admin
console-timetype =gpst # (0:gpst,1:utc,2:jst,3:tow)
console-soltype =dms # (0:dms,1:deg,2:xyz,3:enu,4:pyl)
console-solflag =off # (0:off,1:std+2:age/ratio/ns)
inpstr1-type =serial # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,7:ntripcli,8:ftp,9:http) ## Input source for onboard receiver
inpstr2-type =tcpcli # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,7:ntripcli,8:ftp,9:http) ## Input source for base corrections
inpstr3-type =off # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,7:ntripcli,8:ftp,9:http)
inpstr1-path =ttyMFD1:230400:8:n:1:off
inpstr2-path =xxxxx - removed
inpstr3-path =
inpstr1-format =ubx # (0:rtcm2,1:rtcm3,2:oem4,3:oem3,4:ubx,5:ss2,6:hemis,7:skytraq,8:sp3) ## Input format for onboard receiver
inpstr2-format =rtcm3 # (0:rtcm2,1:rtcm3,2:oem4,3:oem3,4:ubx,5:ss2,6:hemis,7:skytraq,8:sp3) ## Input format for base corrections
inpstr3-format =rtcm3 # (0:rtcm2,1:rtcm3,2:oem4,3:oem3,4:ubx,5:ss2,6:hemis,7:skytraq,8:sp3)
inpstr2-nmeareq =off # (0:off,1:latlon,2:single) ## Transmit NMEA GPGGA messages to Base station
inpstr2-nmealat =0 # (deg) ## Latitude to send
inpstr2-nmealon =0 # (deg) ## Longitude to send
outstr1-type =tcpcli # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,10:bluetooth) ## Solution 1 output path
outstr2-type =tcpsvr # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,10:bluetooth) ## Solution 2 output path
outstr1-path =localhost:8143
outstr2-path =:9500
outstr1-format =nmea # (0:llh,1:xyz,2:enu,3:nmea,5:erb) ## Solution 1 output format
outstr2-format =nmea # (0:llh,1:xyz,2:enu,3:nmea,5:erb) ## Solution 2 output format
logstr1-type =file # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,10:bluetooth) ## Raw data log for onboard receiver
logstr2-type =file # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,10:bluetooth) ## Raw data log for base corrections
logstr3-type =off # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli)
logstr1-path =/home/reach/logs/rov_%Y%m%d%h%M.ubx
logstr2-path =/home/reach/logs/ref_%Y%m%d%h%M.rtcm3
logstr3-path =cor_%Y%m%d%h%M.log
misc-svrcycle =10 # (ms)
misc-timeout =30000 # (ms)
misc-reconnect =30000 # (ms)
misc-nmeacycle =5000 # (ms)
misc-buffsize =32768 # (bytes)
misc-navmsgsel =rover # (0:all,1:rover,1:base,2:corr)
misc-startcmd =
misc-stopcmd =
file-cmdfile1 =…/GPS_GLONASS_1Hz.cmd # (0:…/GPS_1Hz.cmd,1:…/GPS_5Hz.cmd,2:…/GPS_10Hz.cmd,3:…/GPS_14Hz.cmd,4:…/GPS_GLONASS_1Hz.cmd,5:…/GPS_GLONASS_5Hz.cmd,6:…/GPS_BEIDOU_1Hz.cmd,7:…/GPS_BEIDOU_5Hz.cmd) ## u-blox configuration file
file-cmdfile2 =…/GPS_GLONASS_1Hz.cmd # (0:…/GPS_1Hz.cmd,1:…/GPS_5Hz.cmd,2:…/GPS_10Hz.cmd,3:…/GPS_14Hz.cmd,4:…/GPS_GLONASS_1Hz.cmd,5:…/GPS_GLONASS_5Hz.cmd,6:…/GPS_BEIDOU_1Hz.cmd,7:…/GPS_BEIDOU_5Hz.cmd) ## Base u-blox configuration file
file-cmdfile3 =
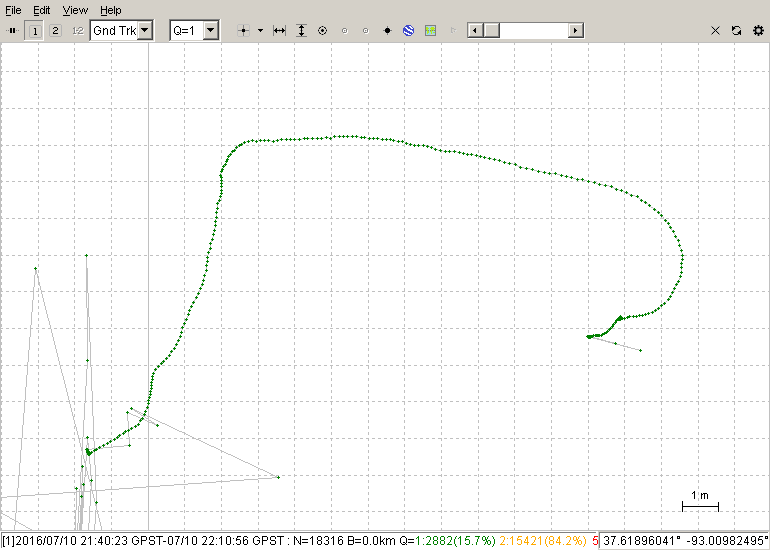
pos1-posmode =kinematic # (0:single,1:dgps,2:kinematic,3:static,4:movingbase,5:fixed,6:ppp-kine,7:ppp-static) ## Positioning mode
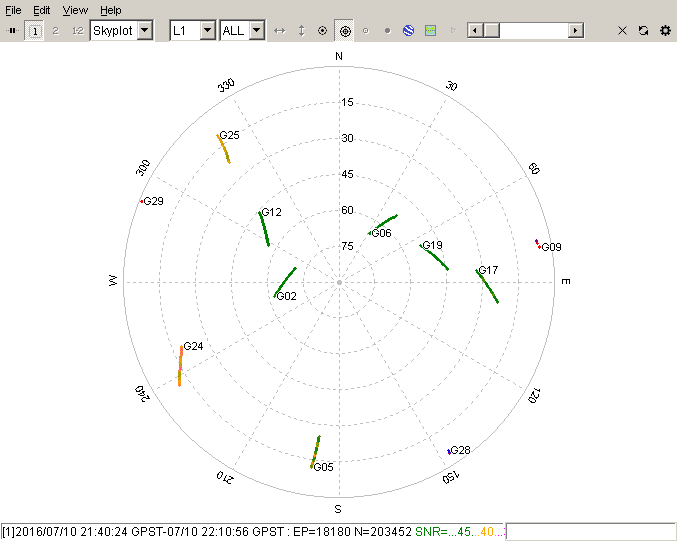
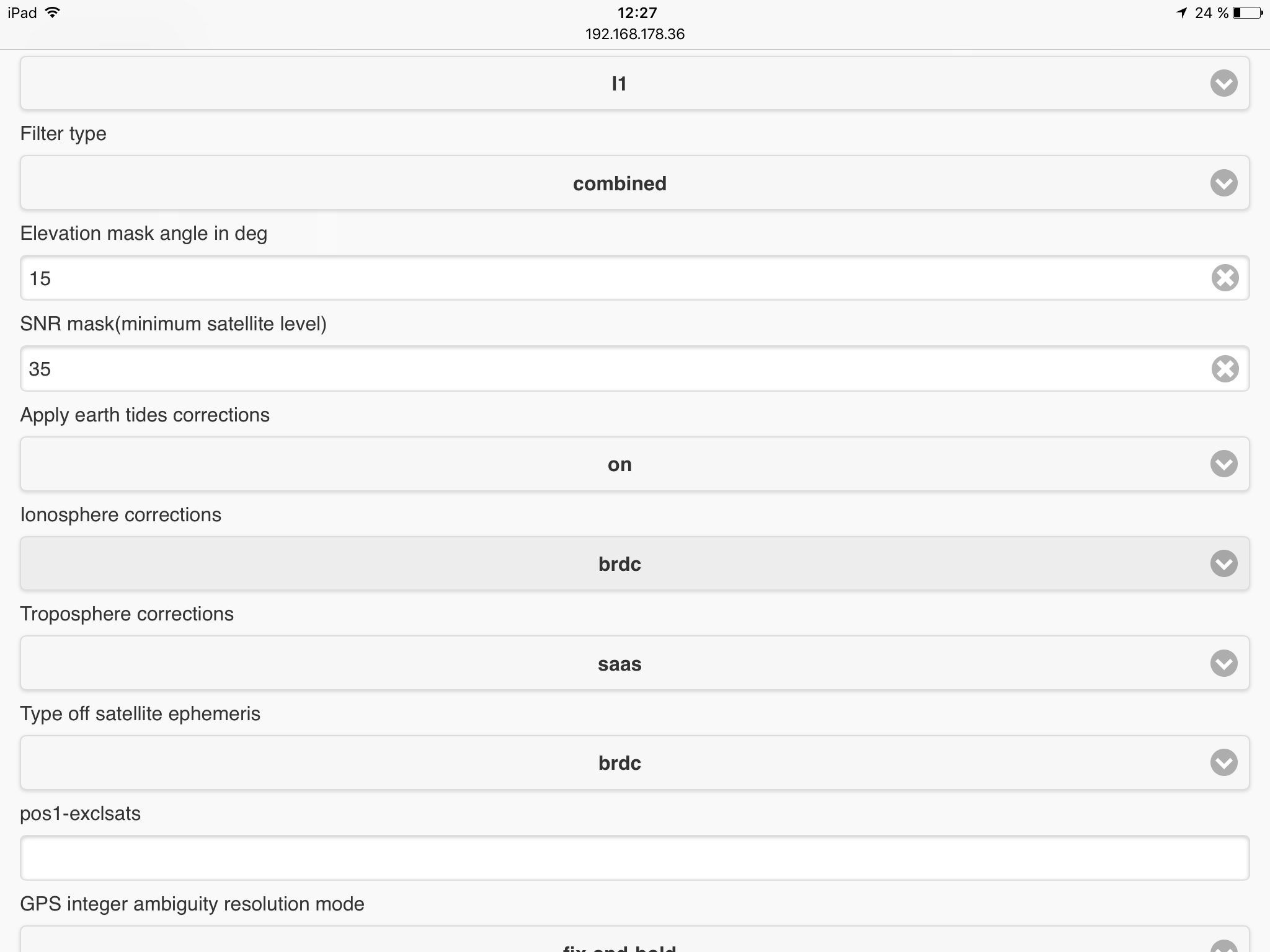
pos1-frequency =l1 # (1:l1,2:l1+l2,3:l1+l2+l5) ## Carrier frequencies
pos1-soltype =combined # (0:forward,1:backward,2:combined) ## Filter type
pos1-elmask =15 # (deg) ## Elevation mask angle in deg
pos1-snrmask =35 # (dBHz) ## SNR mask(minimum satellite level)
pos1-dynamics =on # (0:off,1:on) ## Dynamics model of the rover(Kinematic and dgps only)
pos1-tidecorr =off # (0:off,1:on) ## Apply earth tides corrections
pos1-ionoopt =brdc # (0:off,1:brdc,2:sbas,3:dual-freq,4:est-stec) ## Ionosphere corrections
pos1-tropopt =saas # (0:off,1:saas,2:sbas,3:est-ztd,4:est-ztdgrad) ## Troposphere corrections
pos1-sateph =brdc # (0:brdc,1:precise,2:brdc+sbas,3:brdc+ssrapc,4:brdc+ssrcom) ## Type off satellite ephemeris
pos1-exclsats = # (prn
pos1-navsys =63 # (1:gps+2:sbas+4:glo+8:gal+16:qzs+32:comp) ## Used positioning systems
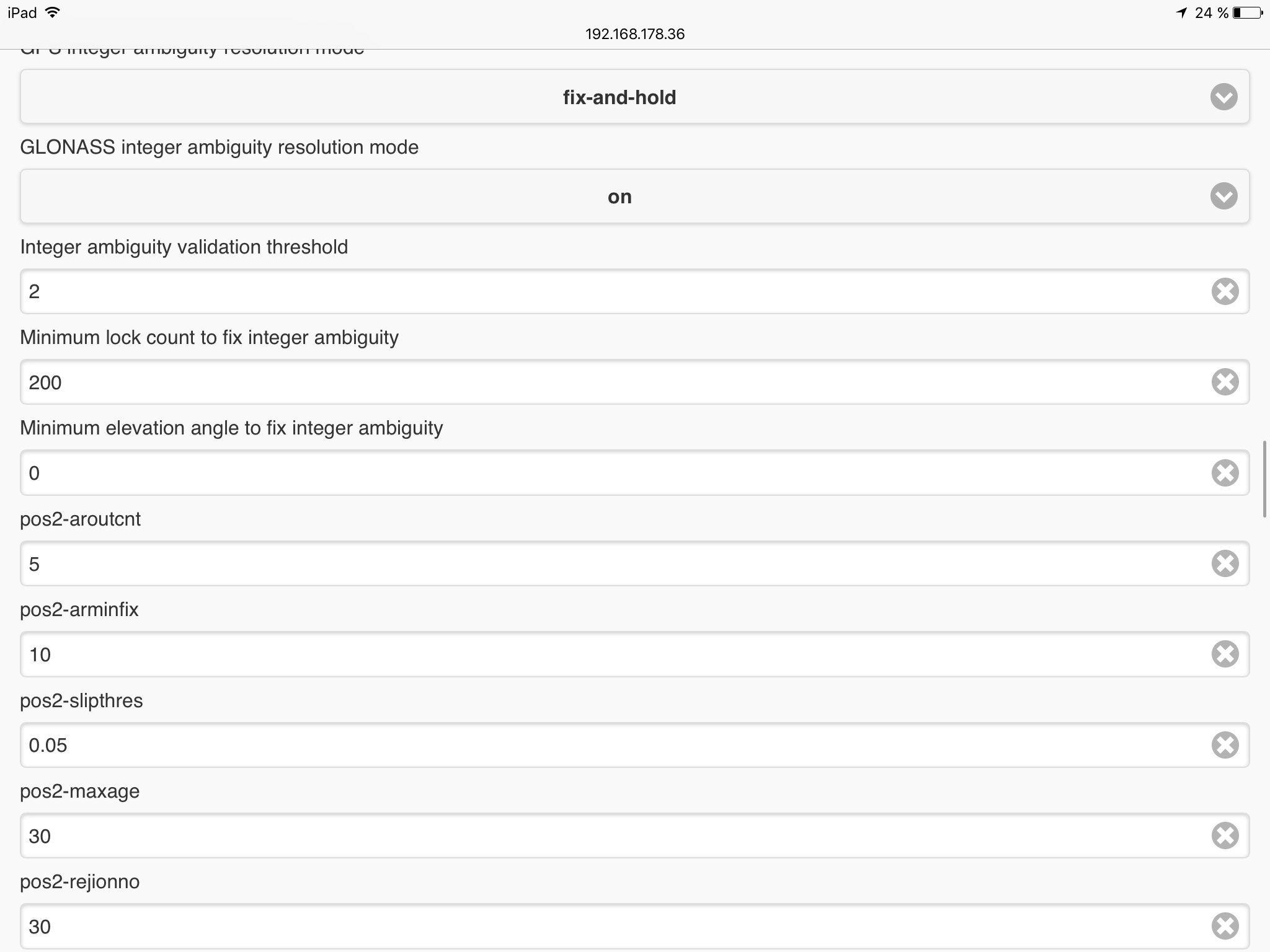
pos2-armode =fix-and-hold # (0:off,1:continuous,2:instantaneous,3:fix-and-hold) ## GPS integer ambiguity resolution mode
pos2-gloarmode =on # (0:off,1:on,2:autocal) ## GLONASS integer ambiguity resolution mode
pos2-arthres =2 ## Integer ambiguity validation threshold
pos2-arlockcnt =200 ## Minimum lock count to fix integer ambiguity
pos2-arelmask =0 # (deg) ## Minimum elevation angle to fix integer ambiguity
pos2-aroutcnt =5
pos2-arminfix =10
pos2-slipthres =0.05 # (m)
pos2-maxage =30 # (s)
pos2-rejionno =30 # (m)
pos2-niter =1
pos2-baselen =0 # (m)
pos2-basesig =0 # (m)
out-solformat =llh # (0:llh,1:xyz,2:enu,3:nmea)
out-outhead =on # (0:off,1:on)
out-outopt =off # (0:off,1:on)
out-timesys =gpst # (0:gpst,1:utc,2:jst)
out-timeform =tow # (0:tow,1:hms)
out-timendec =3
out-degform =deg # (0:deg,1:dms)
out-fieldsep =
out-height =ellipsoidal # (0:ellipsoidal,1:geodetic)
out-geoid =internal # (0:internal,1:egm96,2:egm08_2.5,3:egm08_1,4:gsi2000)
out-solstatic =all # (0:all,1:single)
out-nmeaintv1 =0 # (s)
out-nmeaintv2 =0 # (s)
out-outstat =off # (0:off,1:state,2:residual)
stats-errratio =100
stats-errphase =0.003 # (m)
stats-errphaseel =0.003 # (m)
stats-errphasebl =0 # (m/10km)
stats-errdoppler =1 # (Hz)
stats-stdbias =30 # (m)
stats-stdiono =0.03 # (m)
stats-stdtrop =0.3 # (m)
stats-prnaccelh =1 # (m/s^2)
stats-prnaccelv =0.1 # (m/s^2)
stats-prnbias =0.0001 # (m)
stats-prniono =0.001 # (m)
stats-prntrop =0.0001 # (m)
stats-clkstab =5e-12 # (s/s)
ant1-postype =single # (0:llh,1:xyz,2:single,3:posfile,4:rinexhead,5:rtcm)
ant1-pos1 =0 # (deg|m)
ant1-pos2 =0 # (deg|m)
ant1-pos3 =0 # (m|m)
ant1-anttype =
ant1-antdele =0 # (m)
ant1-antdeln =0 # (m)
ant1-antdelu =0 # (m)
ant2-postype =rtcm # (0:llh,1:xyz,2:single,3:posfile,4:rinexhead,5:rtcm) ## Base antenna coordinates
ant2-pos1 = # (deg|m) ## Base antenna latitude
ant2-pos2 = # (deg|m) ## Base antenna longitude
ant2-pos3 = # (m|m) ## Base antenna height
ant2-anttype =
ant2-antdele =0 # (m)
ant2-antdeln =0 # (m)
ant2-antdelu =0 # (m)
misc-timeinterp =off # (0:off,1:on)
misc-sbasatsel =0 # (0:all)
file-satantfile =…/…/…/data/igs05.atx
file-rcvantfile =…/…/…/data/igs05.atx
file-staposfile =…/…/…/data/station.pos
file-geoidfile =
file-dcbfile =…/…/…/data/P1C1_ALL.DCB
file-tempdir =…/…/…/data/temp
file-geexefile =
file-solstatfile =
file-tracefile =