I’m not sure how relevant this is, but I said I’d try a test, so here is what I found:
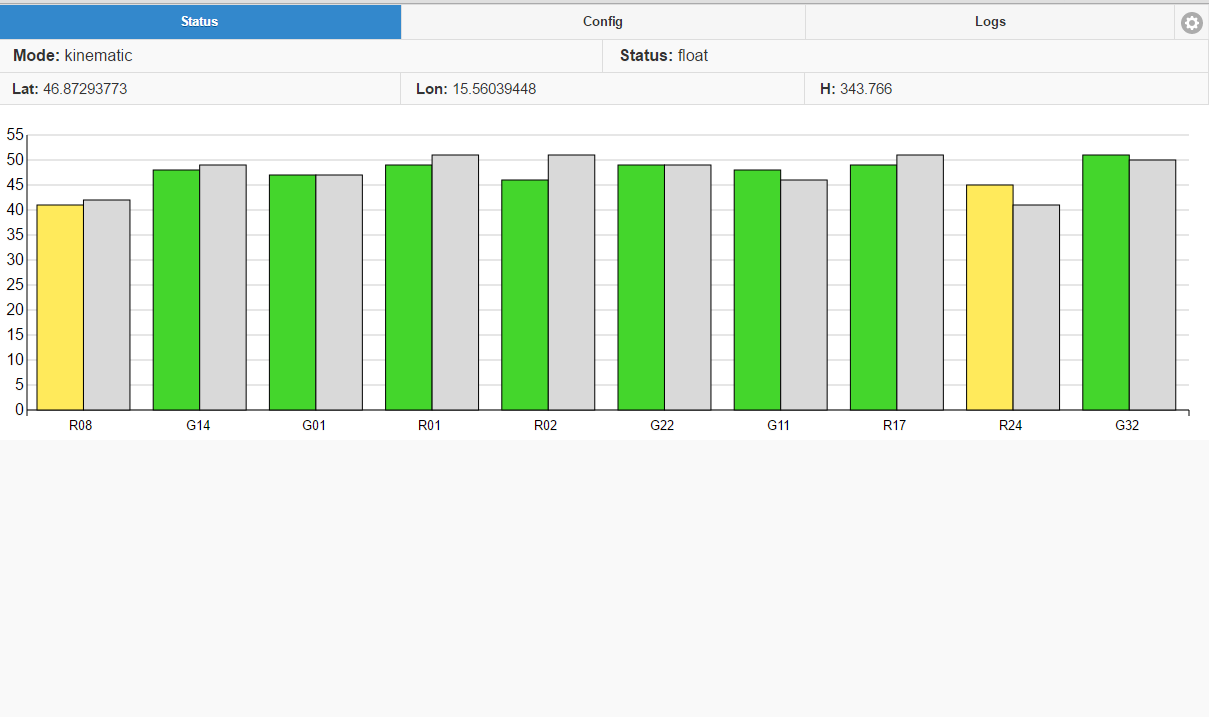
For the past few days, I’ve been testing RTK with the latest ReachView (0.4.5) under an obstructed sky:
- ~80% sky view for base (north 20% blocked by trees)
- ~45% sky view for rover (north 55% blocked by building)
- 15m distance apart
Because of the poor sky condition, take this with grain of salt.  I was able to get a fix for a very short time, but nothing lengthly. The details:
I was able to get a fix for a very short time, but nothing lengthly. The details:
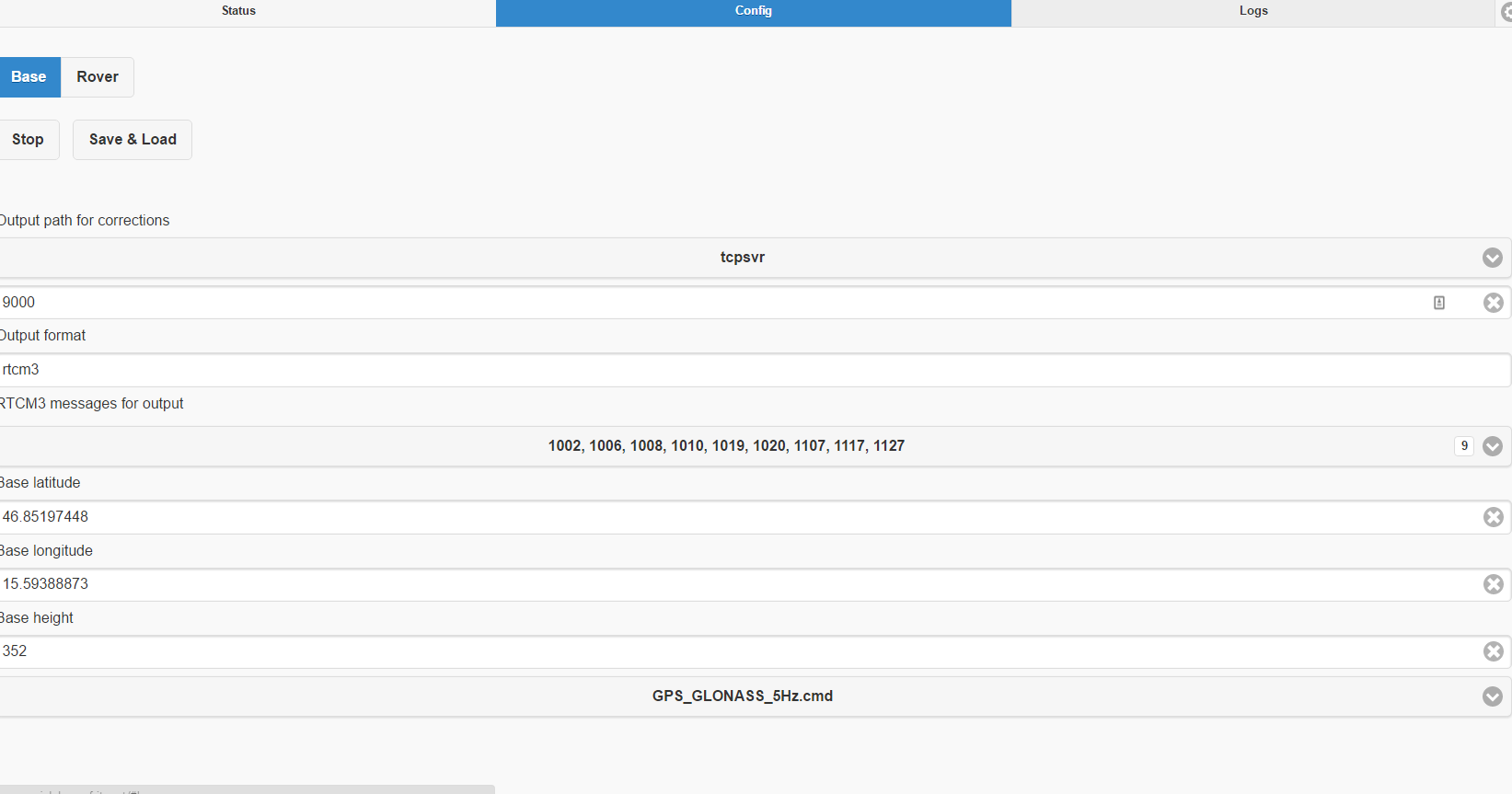
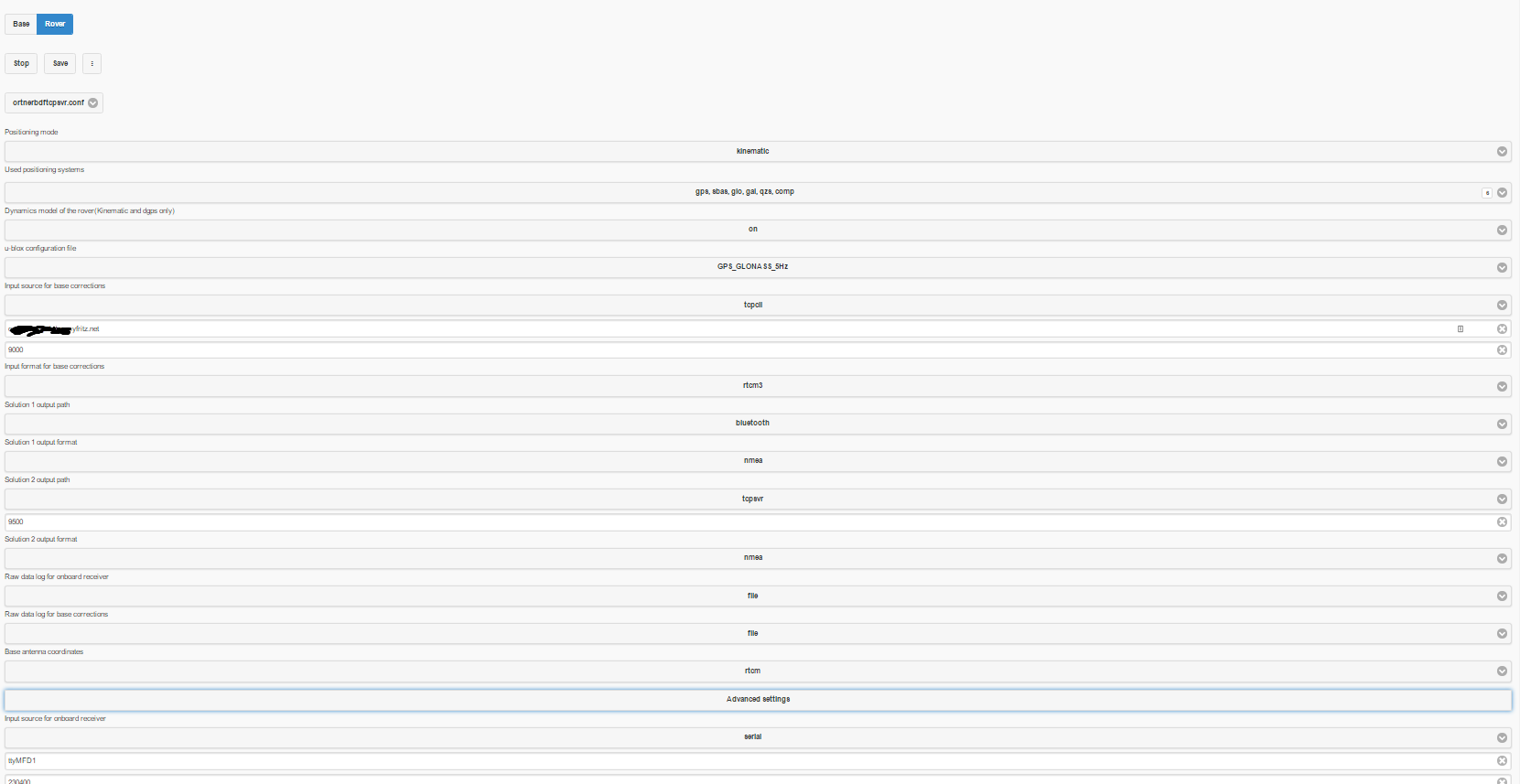
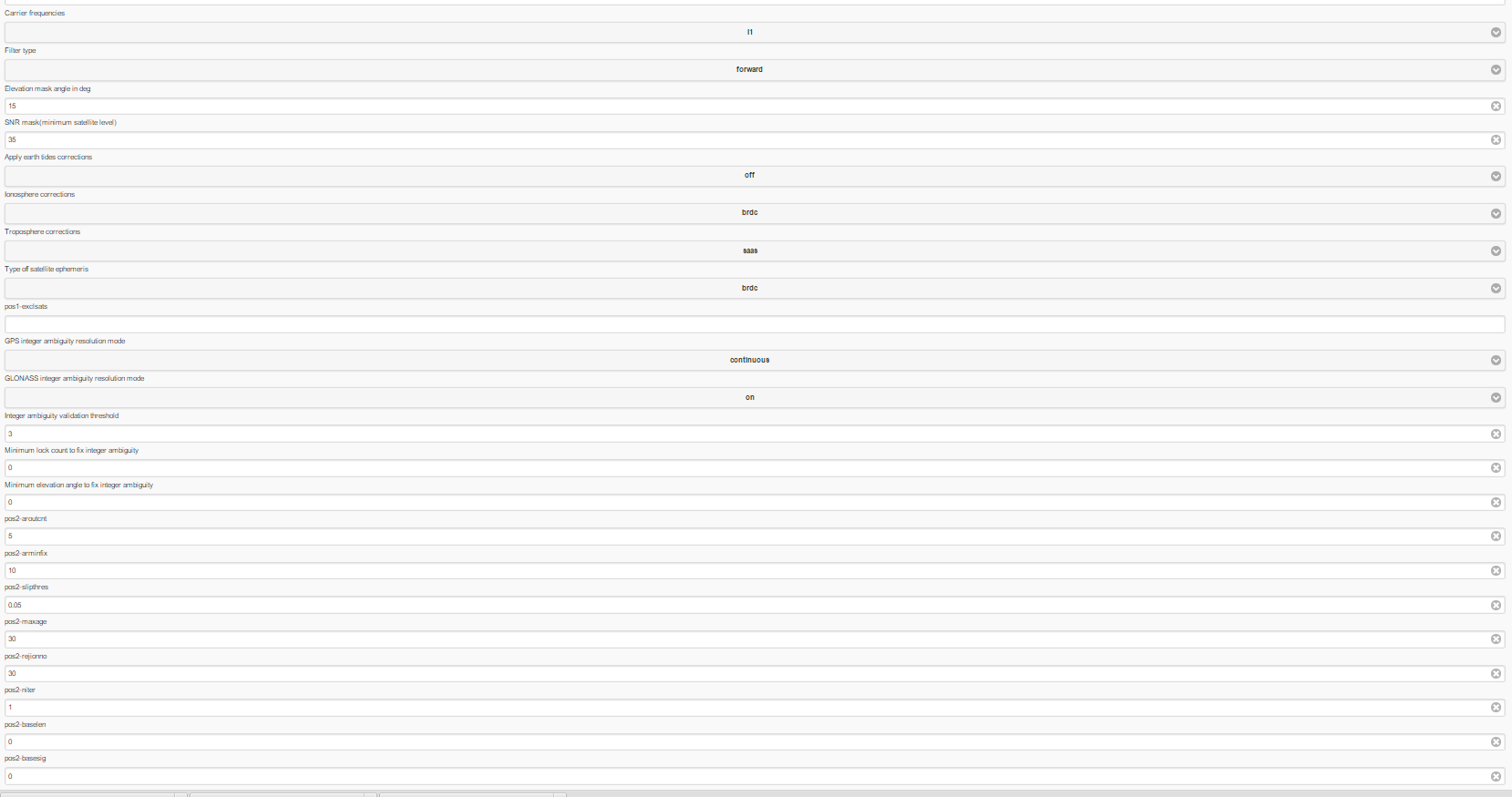
Some testing I did was with Reach sending over TCP to let `RTKNAVI.exe` do the processing and `RTKPLOT.exe` do the plotting. In `RTKNAVI.exe`, I could watch the 'ambiguity ratio' live. When a satellite appears or dissapears or slips above or below the minimum SNR value, I notice it **resets the ambiguity ratio back to 1.0** and that is a major setback in the quest for a fix, as it must reach 3.0 (default) for a fix. I watched this happen repeatedly, over and over under these conditions. Understand that this is not ReachView doing this, it is RTKLIB, and I know ReachView uses modified RTKLIB binaries so this particular quirk
may or may not be _is not_ present when ReachView is handling the processing.
Another thing I noticed with both ReachView and RTKNAVI.exe is a stalling effect where there is no output for 1 to 30 seconds, and then it continues. I thought it might be network latency, so I switched things up and was able to get the age down to 0 or 0.1 seconds, and it still had stalling problems. I don’t know why. My setup: I had the rover connected with ethernet over USB and the base was connected to a wireless router 3m away and that is wired to my computer. In the RTKNAVI.exe window, I can see the base and rover input icons stay bright green when it stalls and the processing(?) icon goes dark.
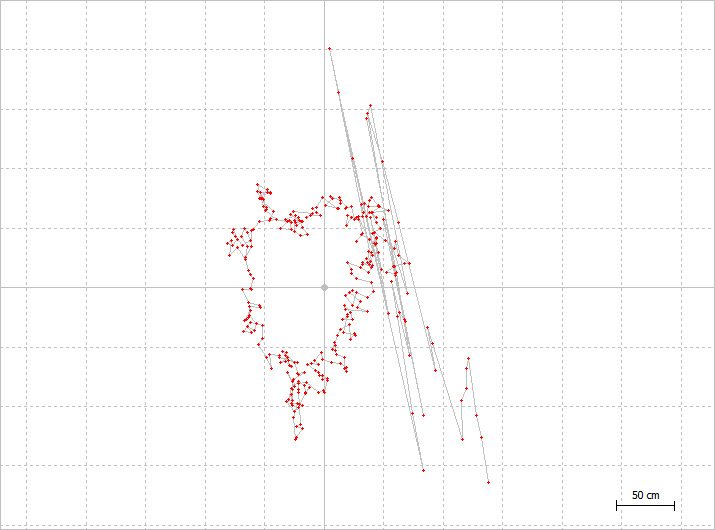
Another thing I noticed in the RTKPLOT.exe window a couple of times was a very stable float with an extremely tight grouping (only about 20mm) for several minutes, but with the ambiguity ratio hovering at 2.0 it was to low to become a fix.
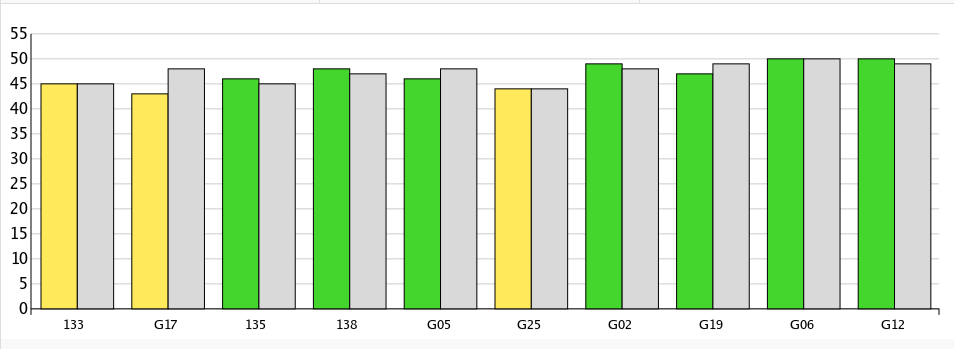
In this testing with an obstructed sky, the best of my poor results were obtained with GPS and SBAS only, 14Hz (but I don’t think frequency mattered here) and picking a minimum SNR that would allow at least 5 or 6 satellites to be used in the processing.
I was really hoping to get a decent RTK fix this way, but it appears I will be off to find more open sky to achieve that.





 but the base and rover are only about 20ft apart. Both base and rover have tallysman 3710 antennas and the entire setup was in FIX last weekend with heavy clouds.
but the base and rover are only about 20ft apart. Both base and rover have tallysman 3710 antennas and the entire setup was in FIX last weekend with heavy clouds.

 I was able to get a fix for a very short time, but nothing lengthly. The details:
I was able to get a fix for a very short time, but nothing lengthly. The details: