Hi everyone, i’m having big big issues with measuring points with my unit, a new RS3.
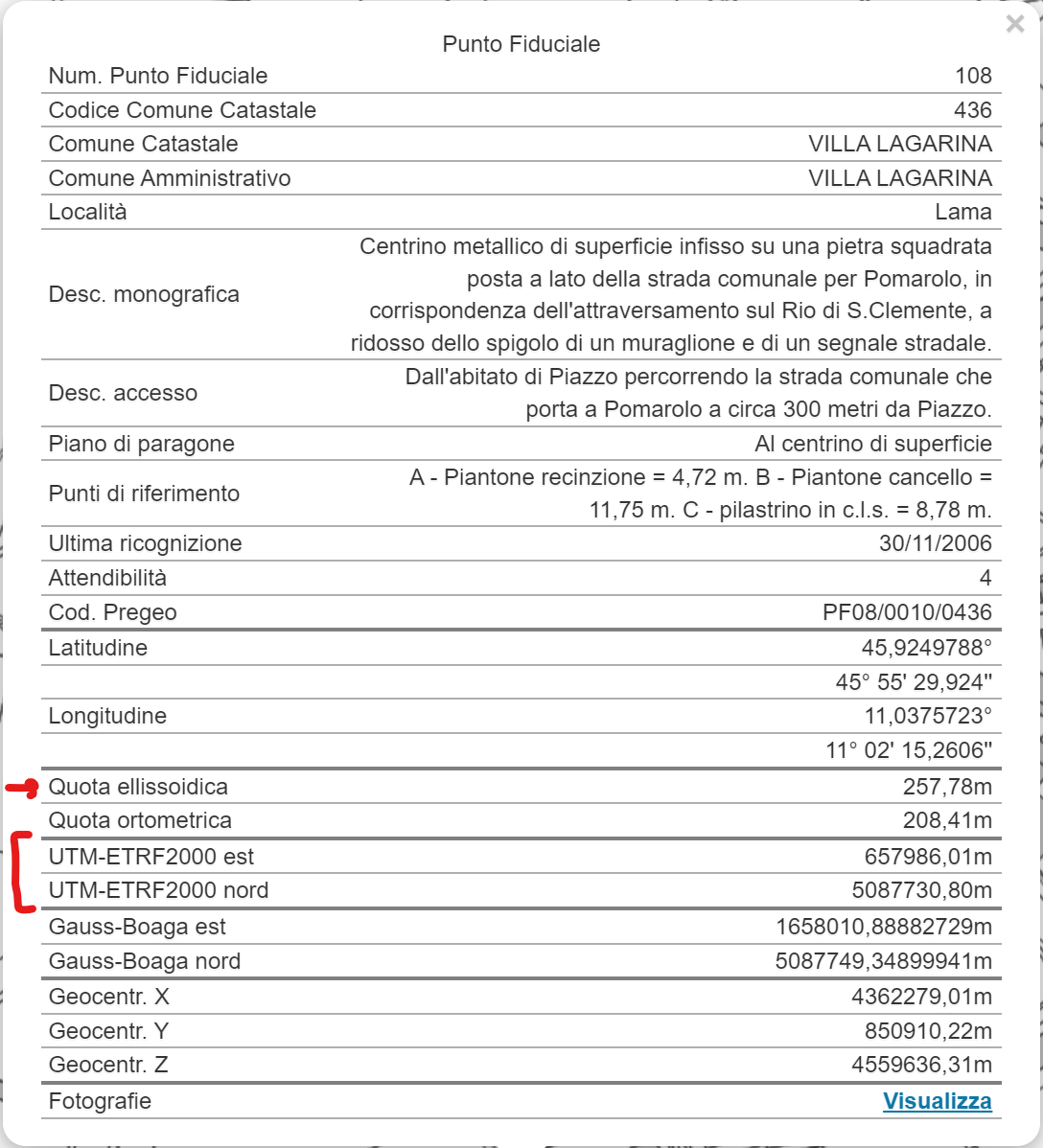
I’ve done multiple tests with my unit, and i’ve discovered i have big error over known coordinate points, once even 10cm in heights. I tried to raise the elevation mask from 15 to 20 degree, in order to reduce errors, things were a bit better, with errors about 5cm over known points. Every time i was in FIX solution, Ntrip correction (topnet live RTK), with low PDOP value and about 30 satellites (normal for my area, i live in a valley surrounded by mountains)
So i’ve tried to do multiple survey over same points, even with this GNSS Settings, but thing didn’t go well, i have my “manhole cover corner” for testing, and now i had big errors from 4 multiple survey:
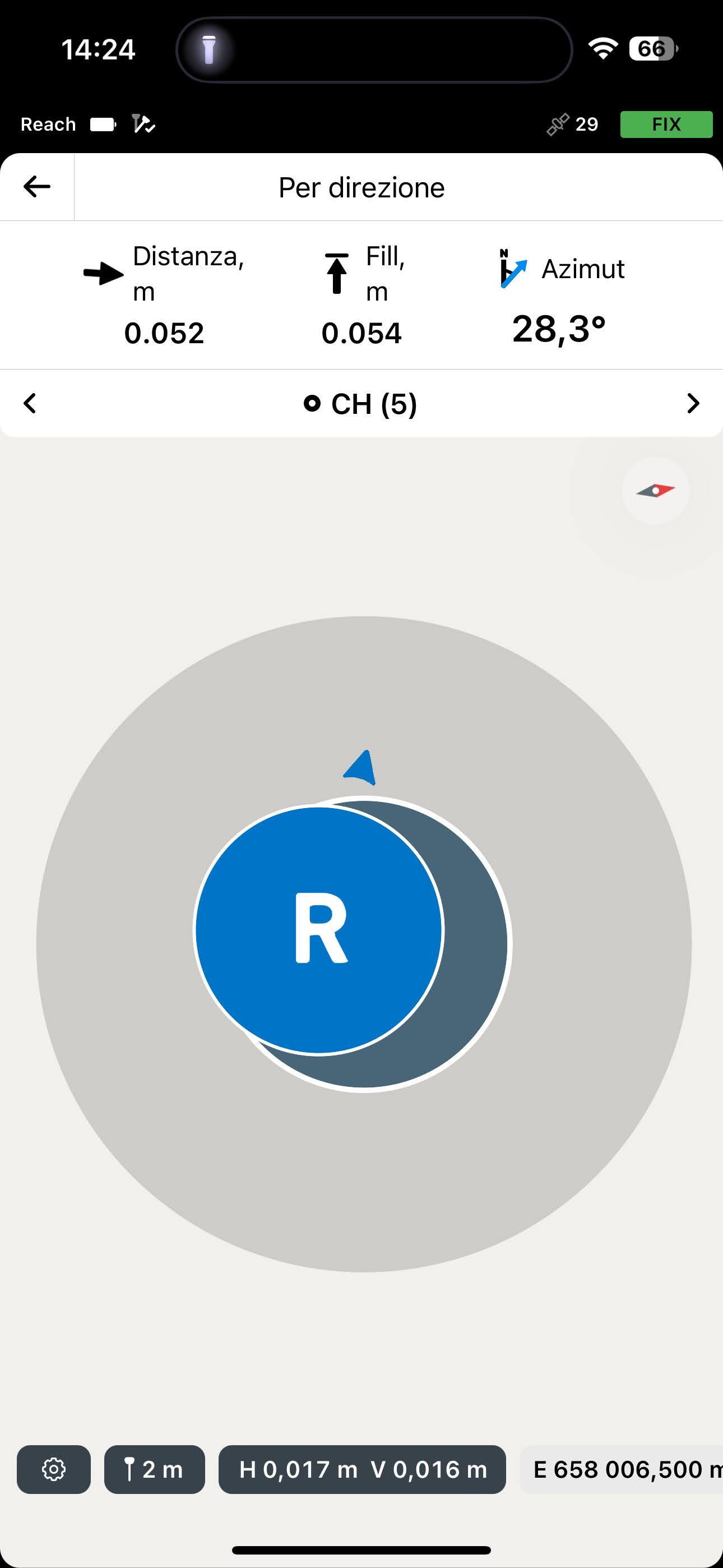
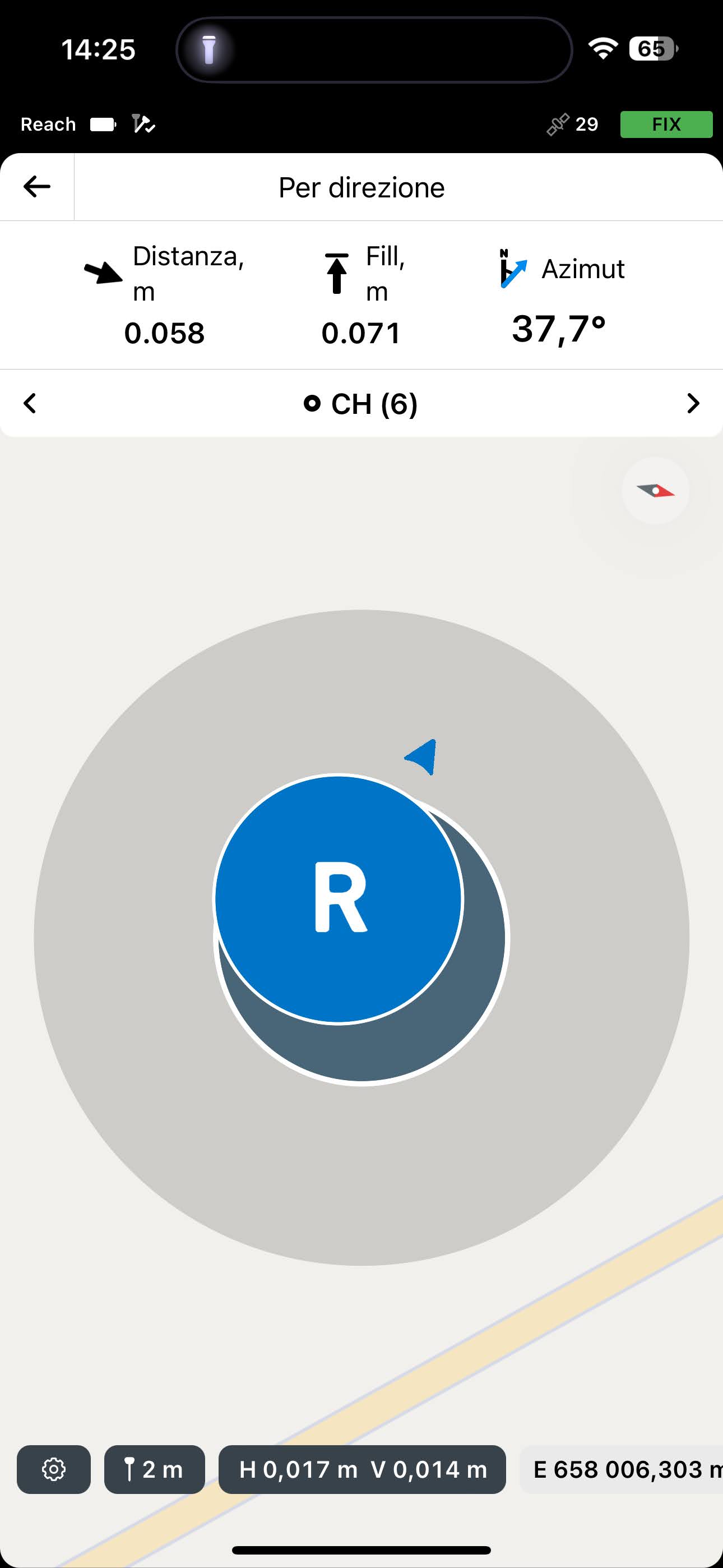
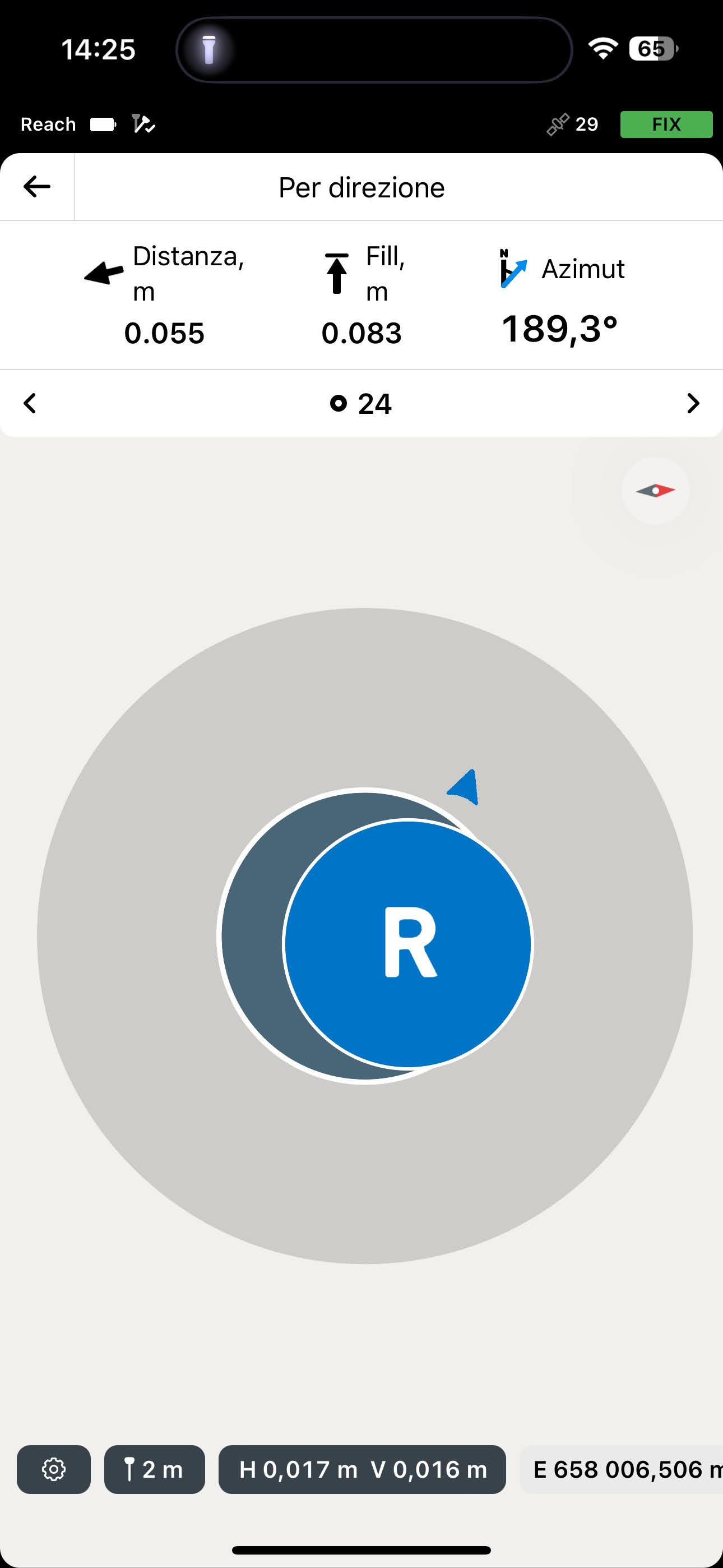
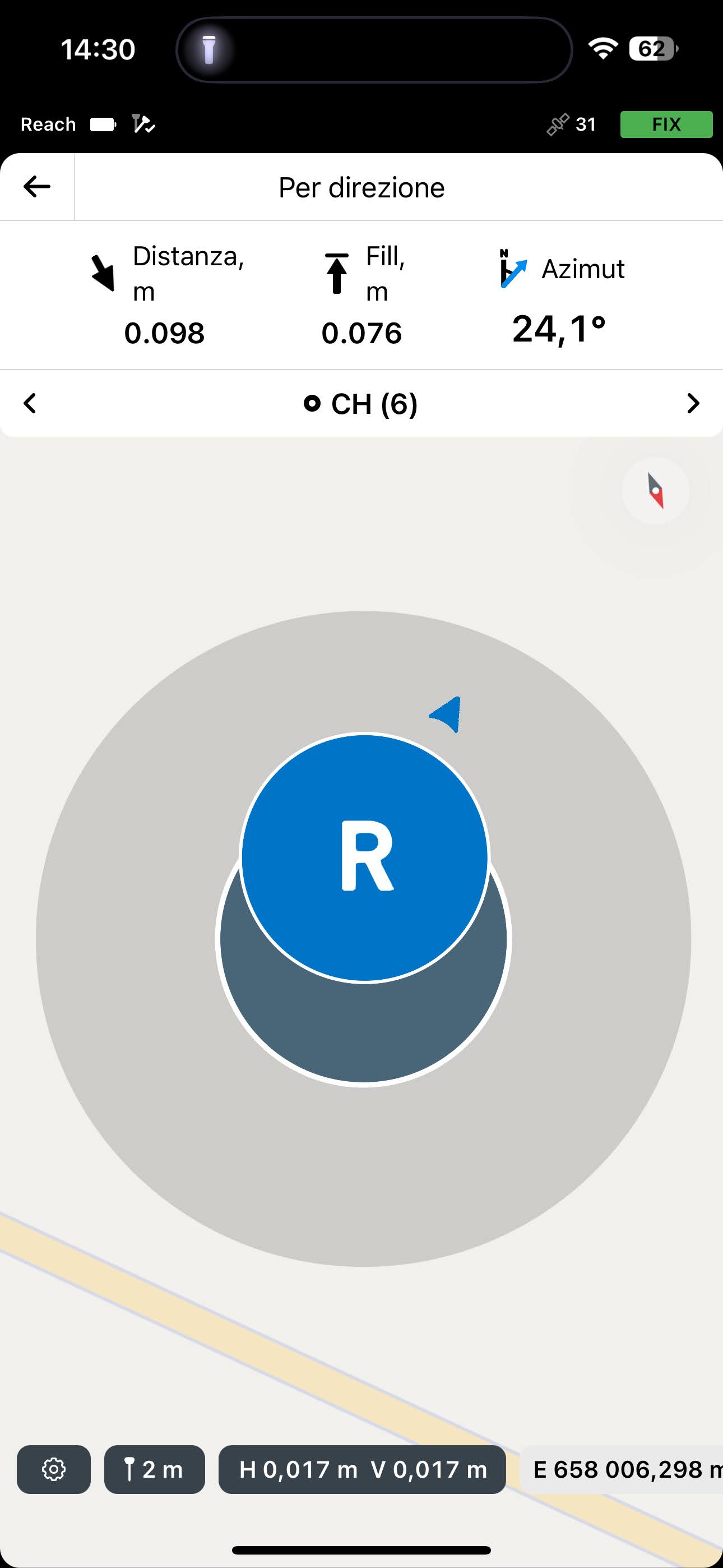
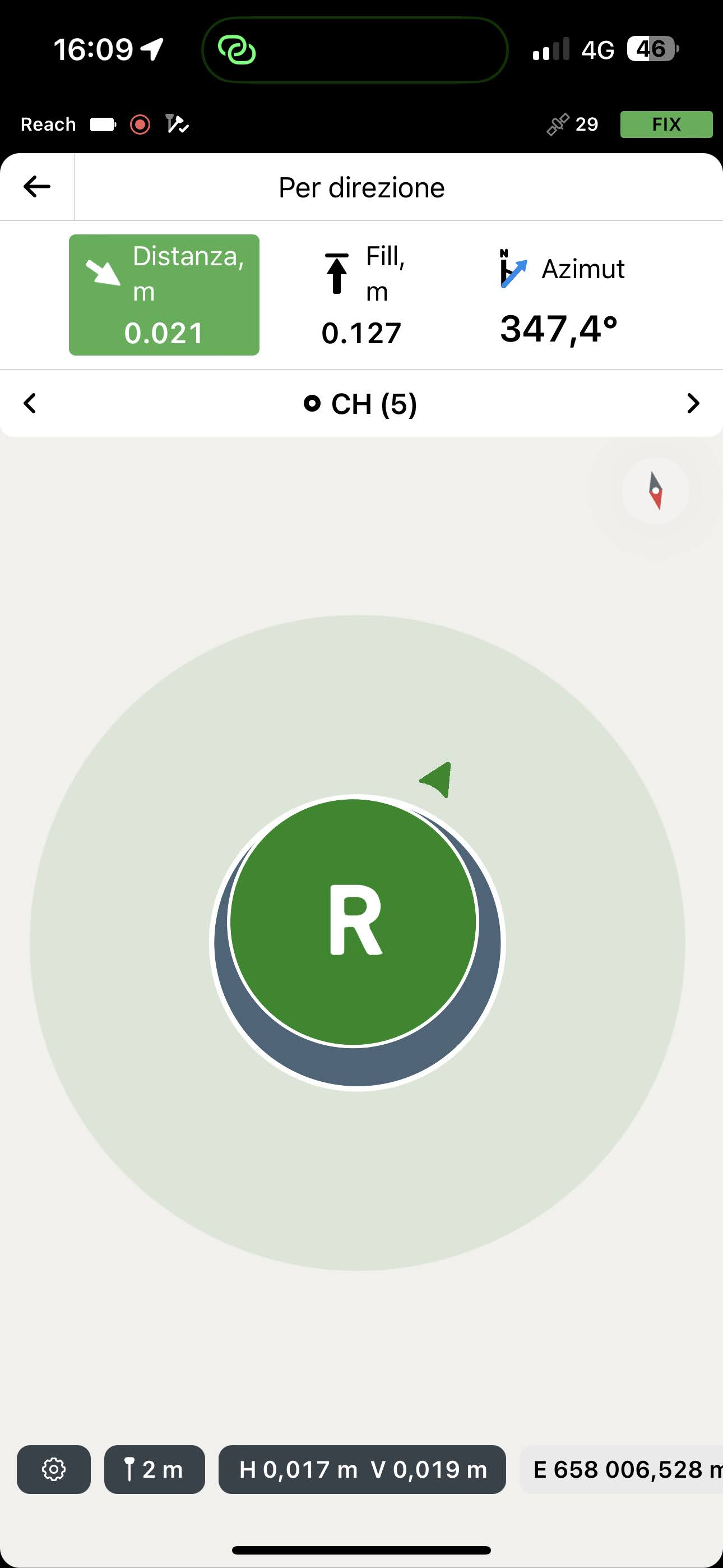
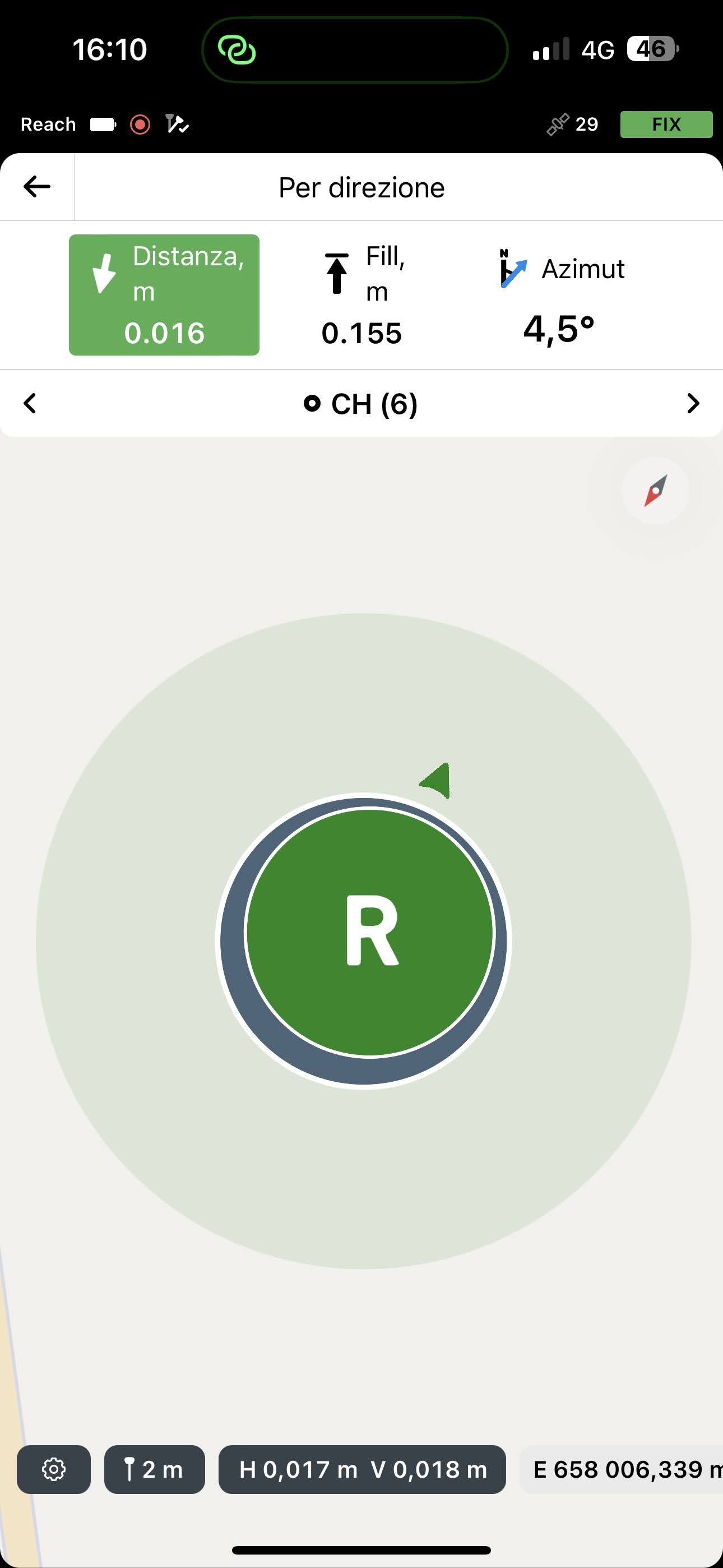
This was today’s measure over past days survey over same points. How is it possible to have more than 10cm considering distance and height over same point?

This was the status of the rover in that moment. Every survey i’ve done i was in FIX, with that sigma errors, about 2cm horizontally and 2.5cm vertically. PDOP is ok. Tried also with IMU OFF with no improvement. Baseline from NTRIP correction is about 4km, not so far.
The manhole is outside my house, in an urban area, but as you can see from the pictures, i have a clear sky view in every direction and no near obstruction.



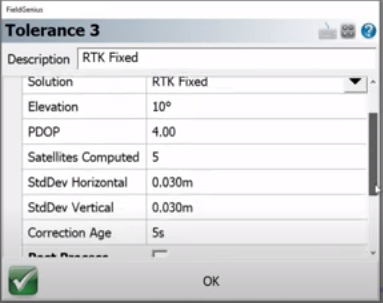
These are my GNSS settings
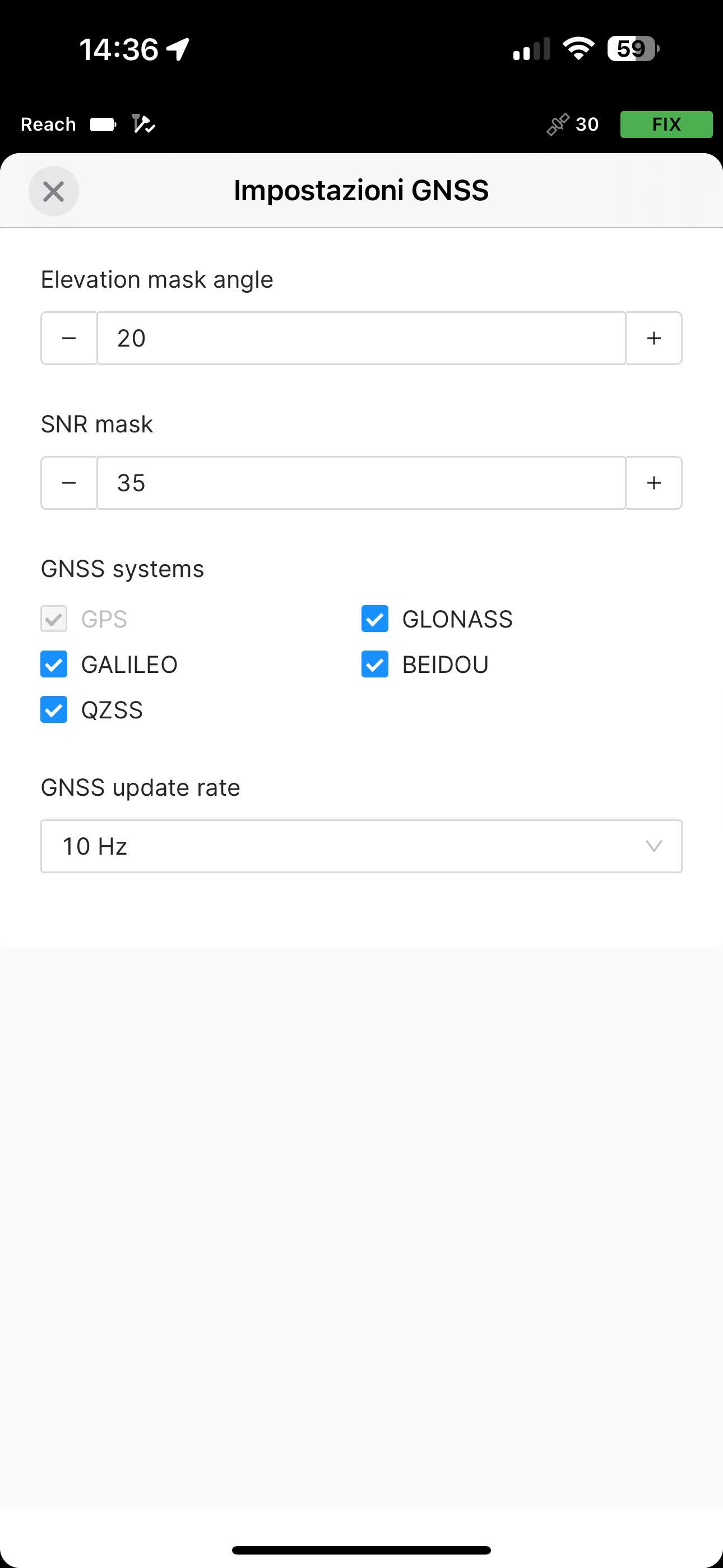
Should i try to raise the SNR Mask?
Could this issue be cause by interference?
I had same results in another area where i’ve done 2 survey in 2 different days.