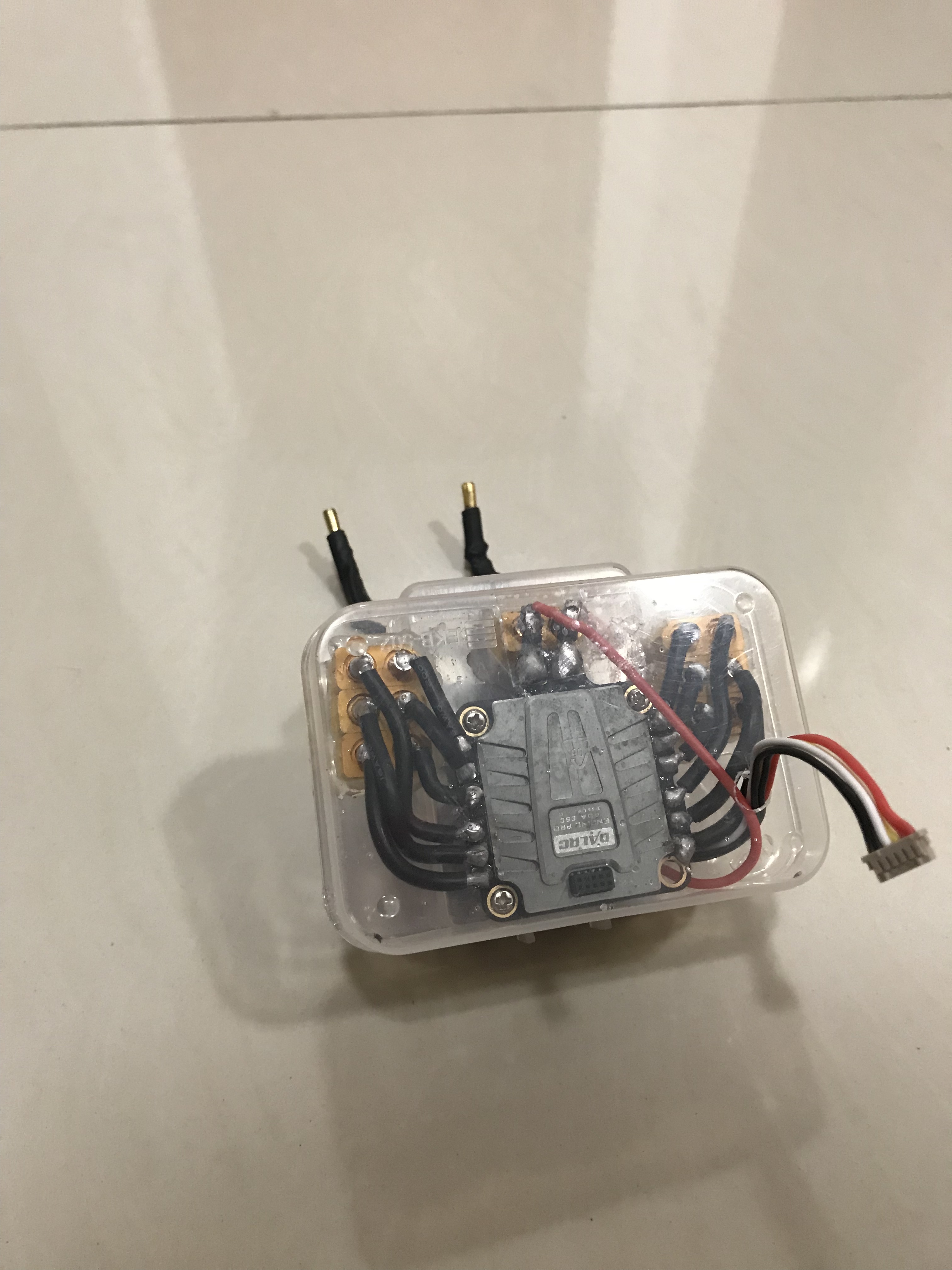
The new T-motor 4-in-1 ESC (45A) and Mauch power module are on the way and should reach within 7-10 days.
As well as Pi Camera v2 with a holder.
Stay tuned for the updates.
Meanwhile I am working on the software part. I am planning to use MavProxy as Mavlink proxy on a public IP hosting (I already have 1 Linux machine on Digital Ocean hosting) and QGroundControl as GCS on iPhone + browser for video stream from Pi camera on second iPhone.
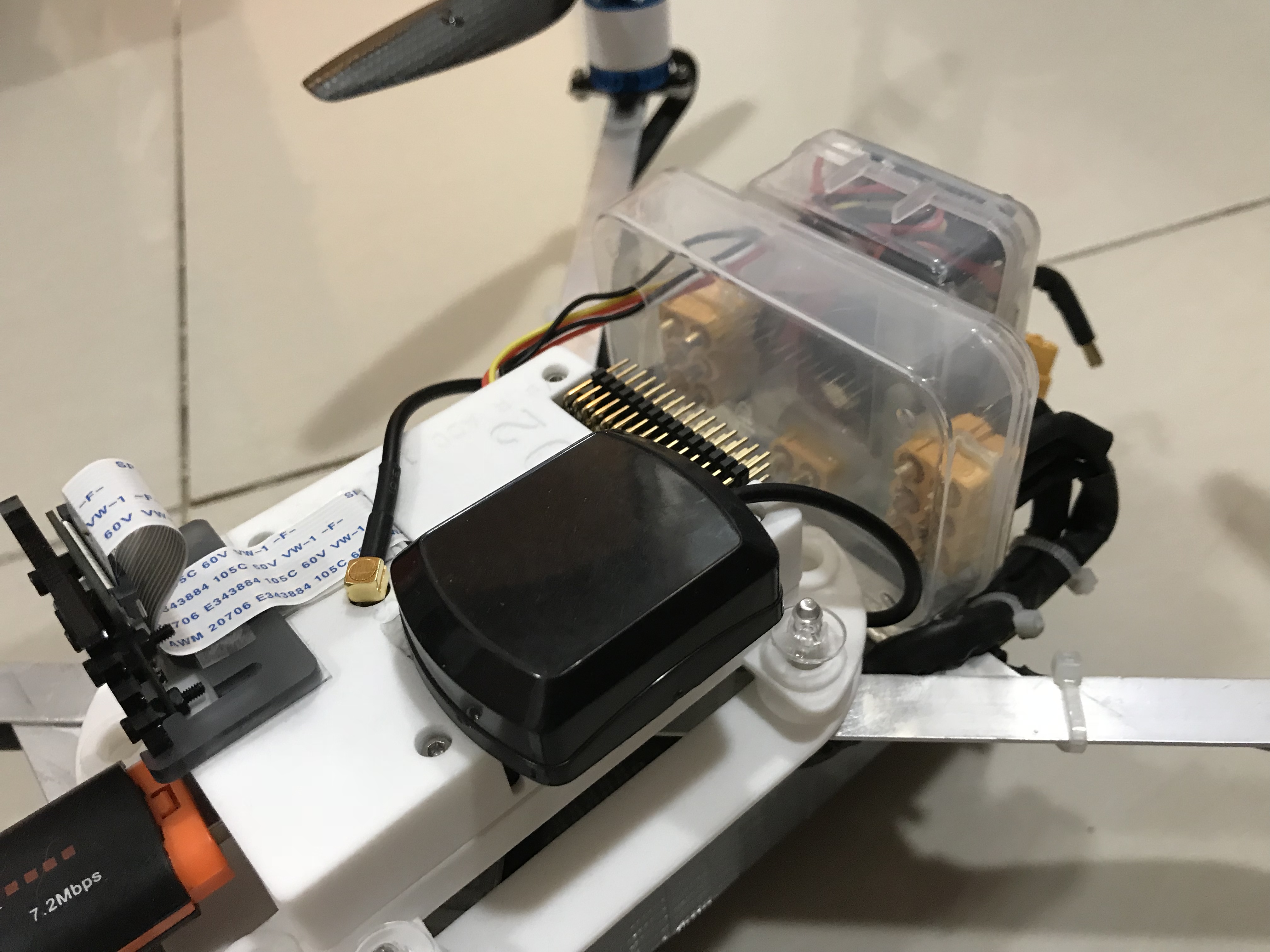
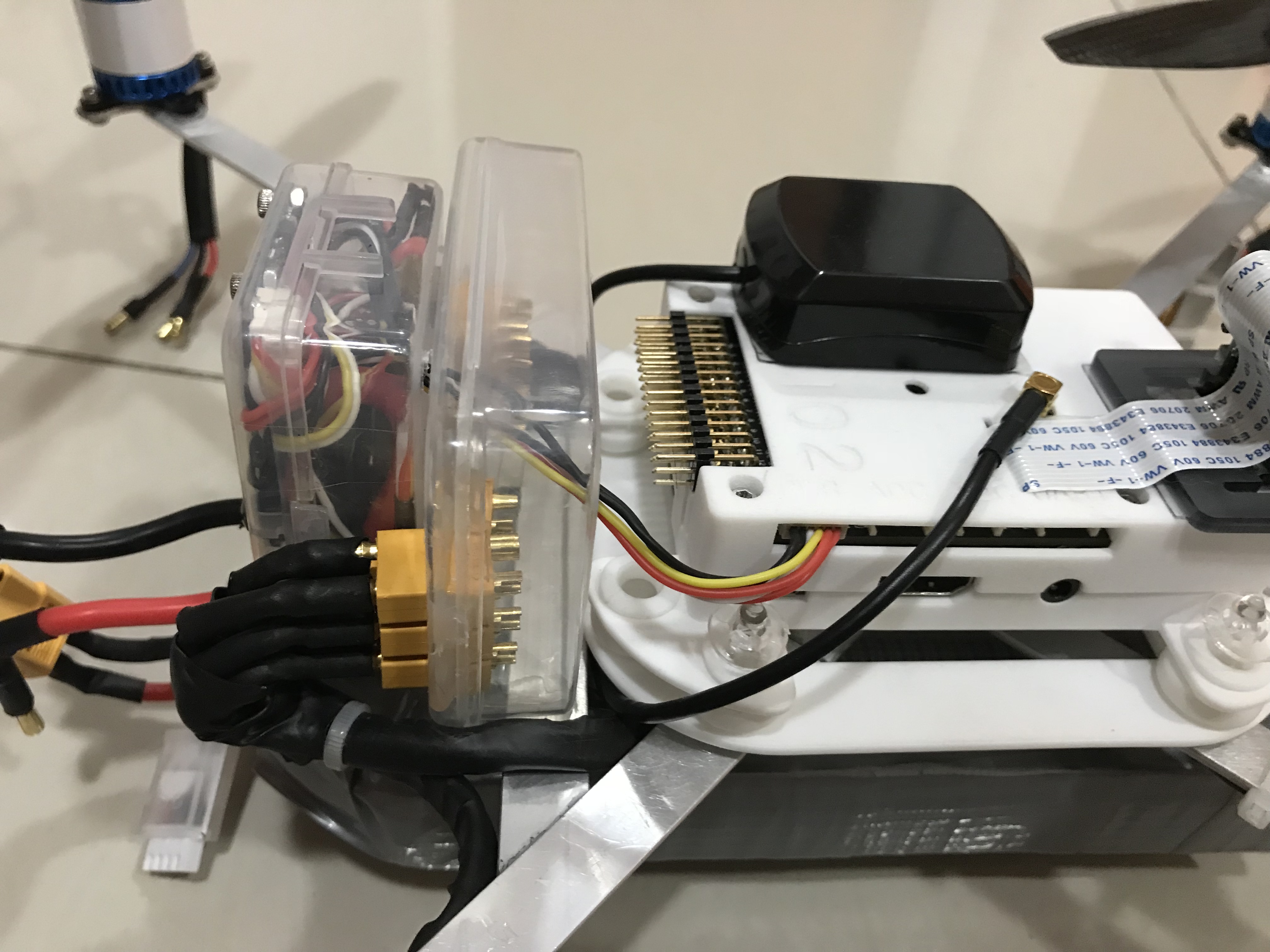
Nice work but be aware Pi Camera (flat ribbon) is quite noisy and your GPS signal could be altered. You may have to move your GPS antenna elsewhere, away from other electronics.
Latest updates: I configured for Rtmp streaming to Youtube using FFmpeg.
It is working over my 3G in the smallest 144p resolution, however Youtube lag is around 10-15 seconds.
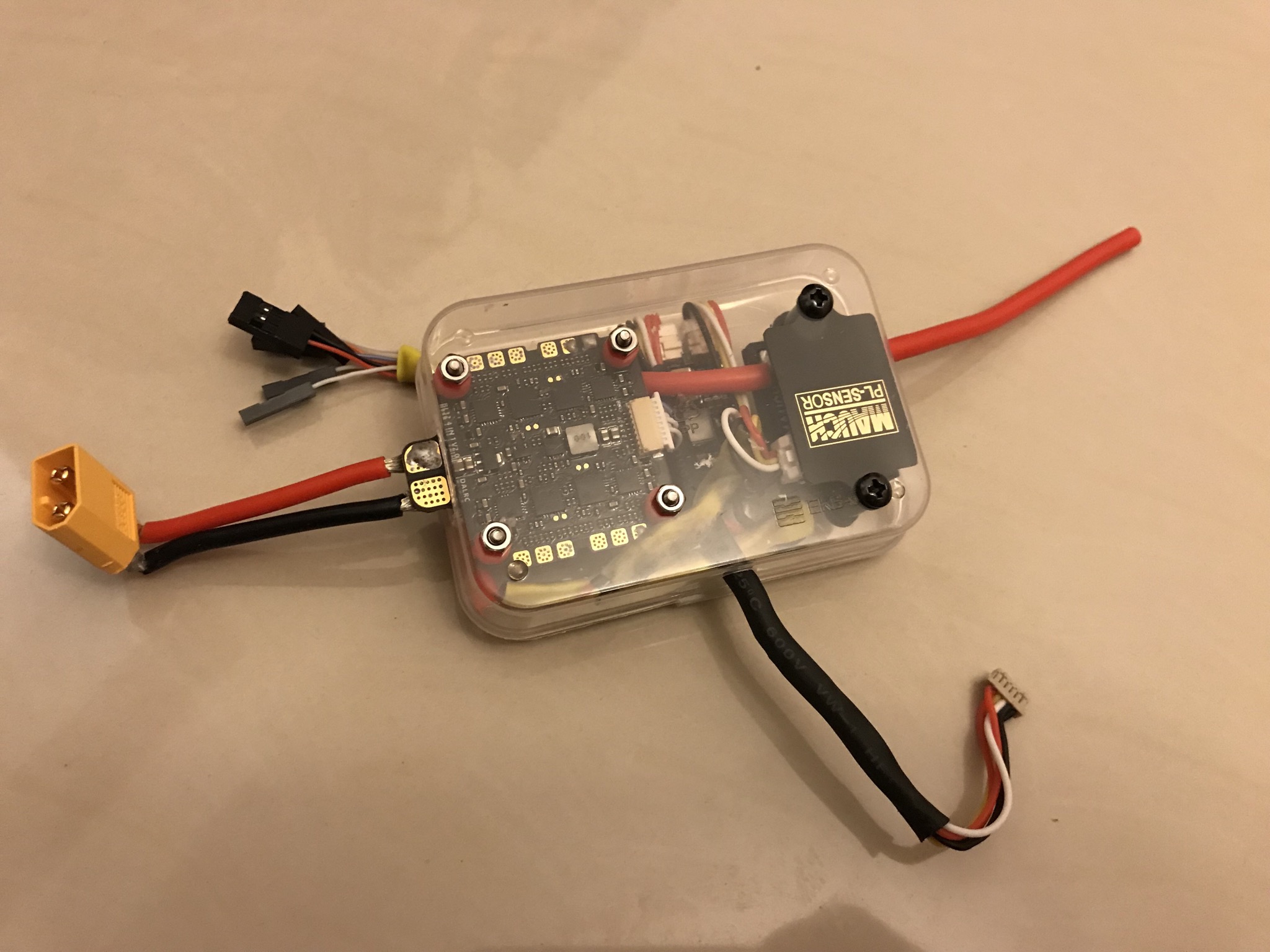
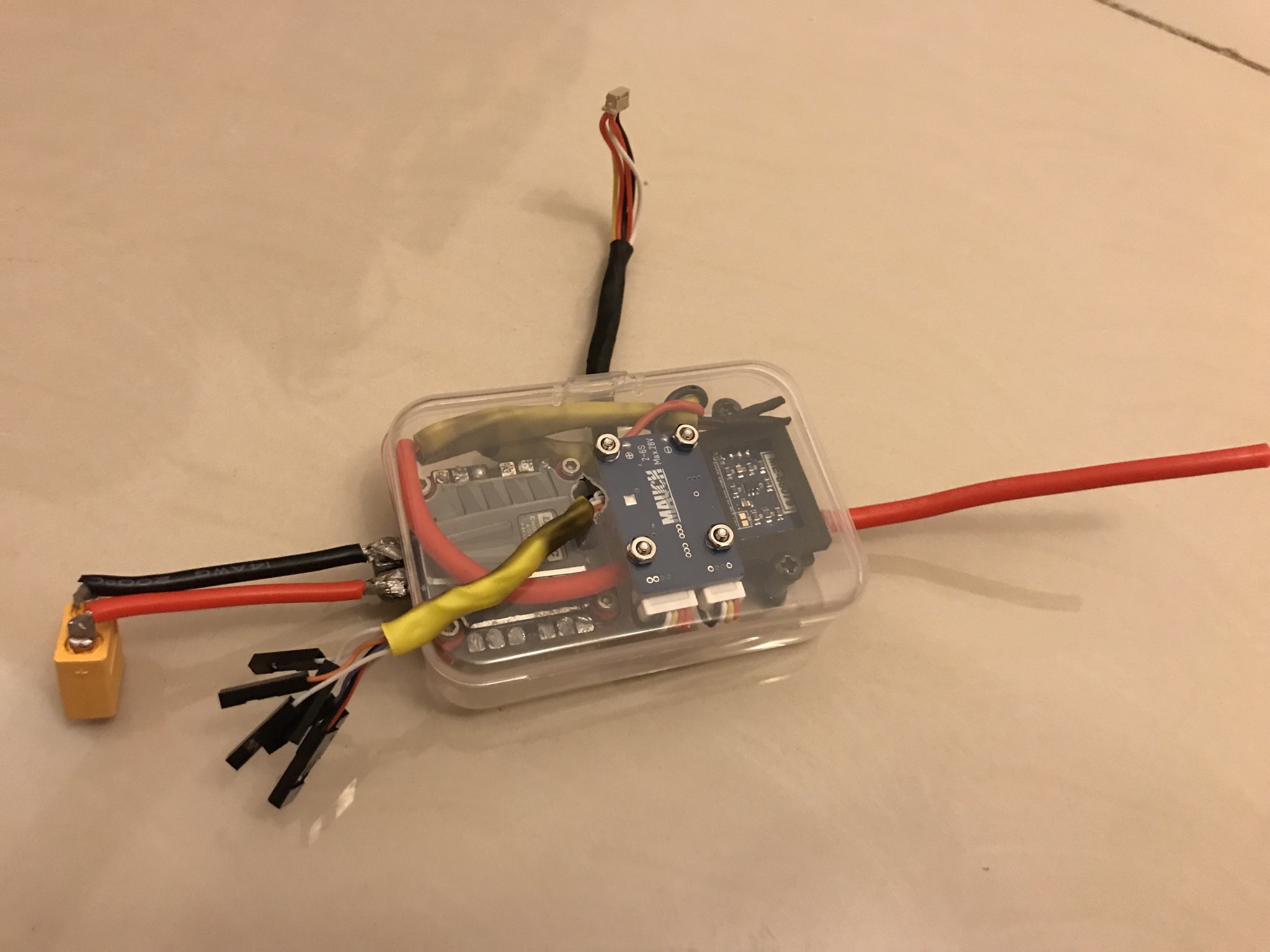
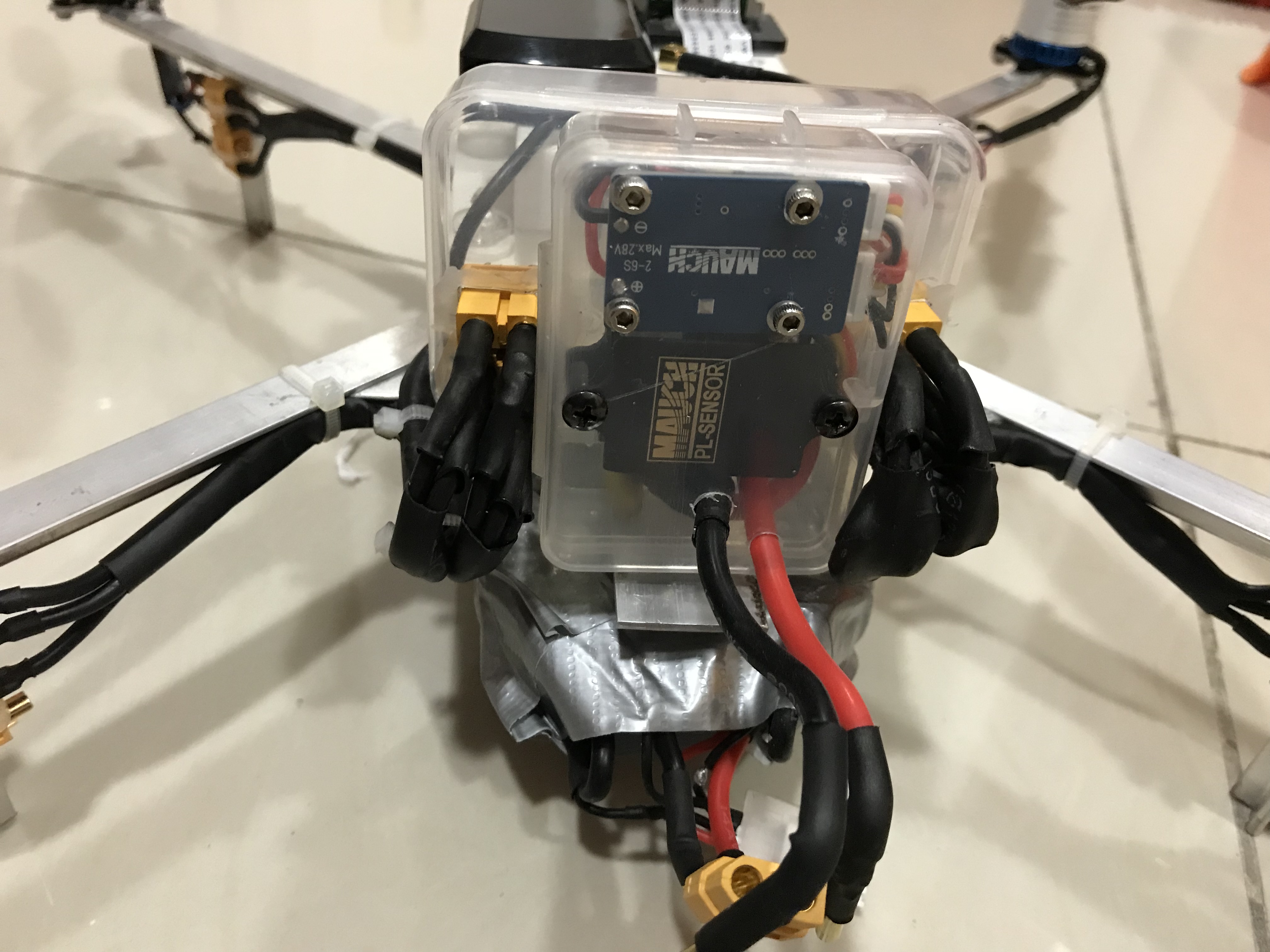
Today Mauch power module has arrived. Still waiting for ESC - will come within 5 days.
Some delays are accompanying this project.
The second ESC is dead on arrival.
But I was smart enough to order third at the same time - different brand (T motor), and its on the way. Such tricks can’t fool old system engineer.
Furthermore - Arducopter on newly fresh Navio 2 with some older RPi3 (i had it lying around) is taking 30% CPU (after apt upgrade), while same SD image on previous drone takes 15% CPU.
I will dig more into it, if it is version-specific issue or hardware-related. One thing for sure - on old drone “sudo systemctl stop arducopter” was taking 25-30 seconds, while on new - 1 second.
All these things seem strange and I will update in next days on my findings, while waiting for T-motor ESC.
First flight completed. About 14 minutes to 11.57v, with total time probably projected to be around 25 minutes, as expected.
There is some issue with power module voltage measure.
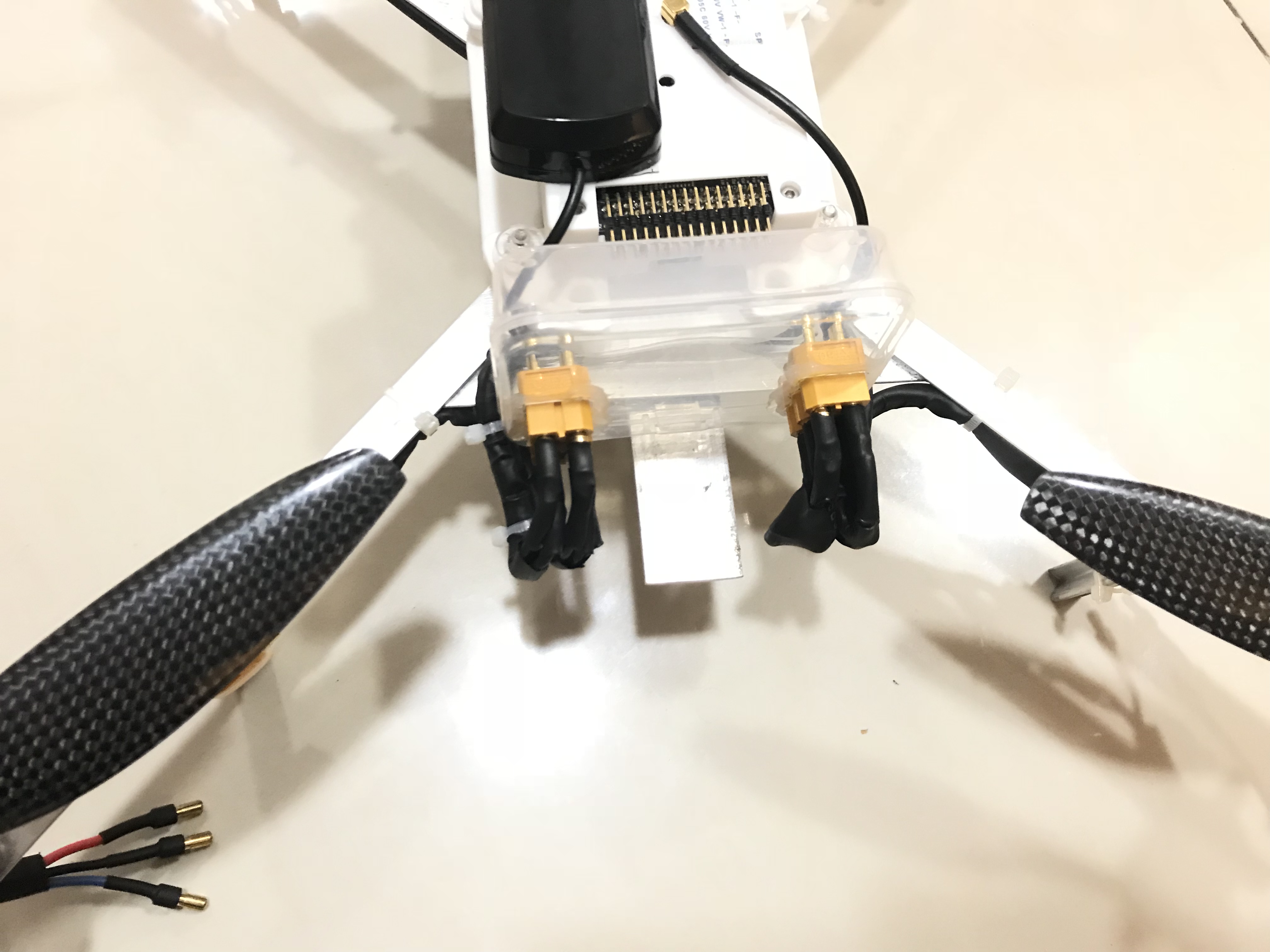
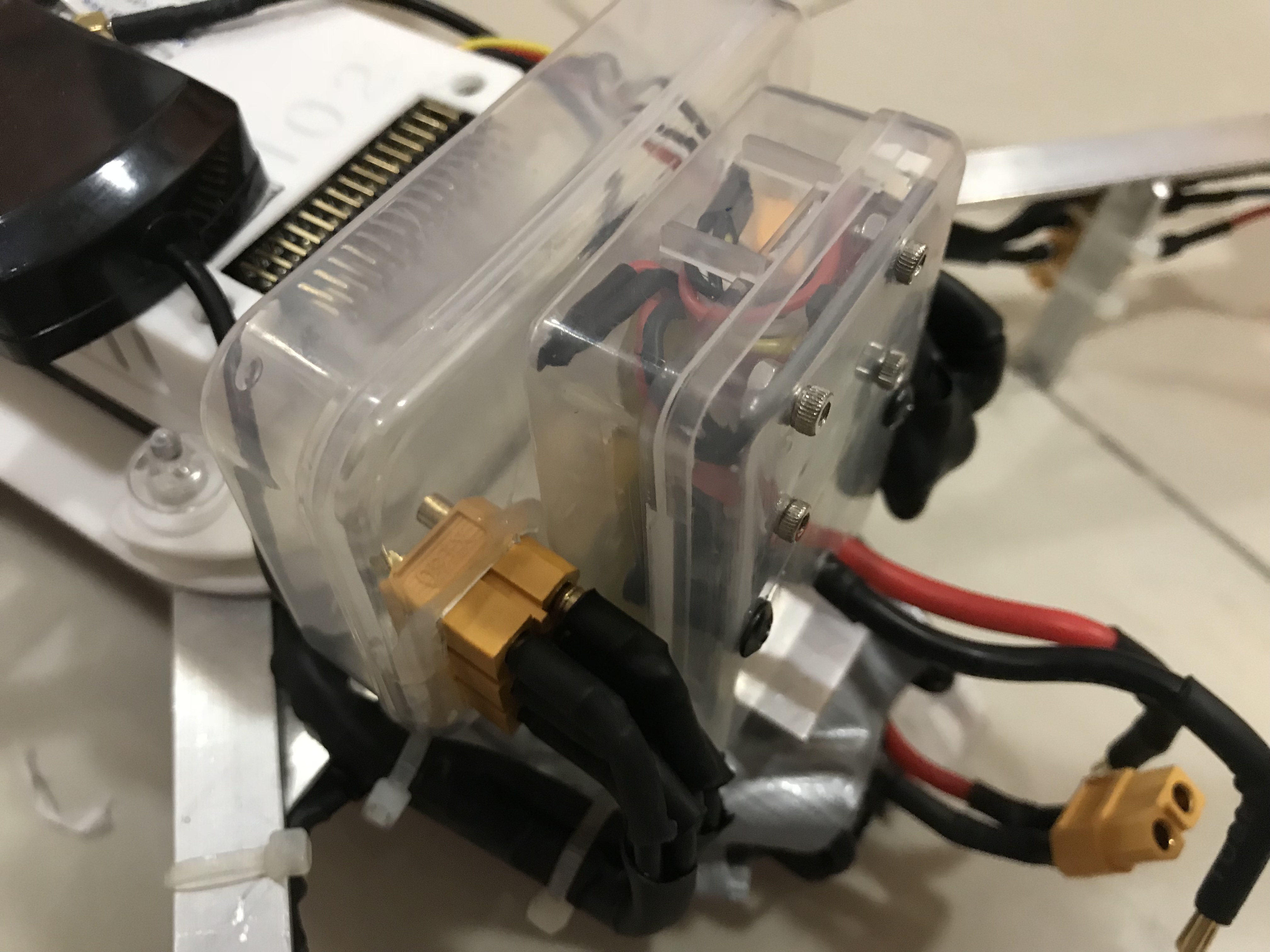
However there is 1 major issue - the frame failed structurally.
The arms have bent. This aluminium profile didnt proove to be strong enough.
I will have to strengthen them.
What if you flip the arms upside down? Maybe the engineering didn’t take into account the direction of the force. Any time you work with metal you should think about webbing and cross bracing. Metal has a nature of twisting and not recovering.
With strengnthened arms and smaller LiPo (5500 instead of 12000), second flight was without structural deformation.
10 minutes flying time.
However I still have issue with Mauch sensor/power module voltage divider - I have to put 11.3 (or nearby) instead of 10.
Can it be because I connected Positive lead together with Capacitor near ESC?
With this battery more (and a bit less frequent with 5500mAh), drone enters resonance vibration noticeable by very loud sound from props. It is not shaky during these periods (10 seconds each 15 seconds), just loud.
What can be the issue?
Another thing - it starts to vobble time to time, however this can be due to some rigid contact between FC and frame.
Otherwise it is even more stable than its predessor and soon operation will start.
Maybe the resonance is just from the frame and any slight vibration that exists. Almost like a stringed instrument. With the arms being that narrow I would imagine the frequency would be higher and much more noticeable. Another difference between polys and metals. Maybe once you have your design dialed-in you can coat or dip the chassis… I assume you have some type of dampening material in between the motors, chassis and other equipment.
You really need to find round or square aluminium tube to build your copter. Those T-profiles are a bit stronger than flat bar, but their resistance against twisting is really not great. A copter generates all kinds of forces, it is not just a static weight supported by the props. I bet the forces generated by the gyroskopic effects of the props are part of your problem. These forces twist the arms, each time the turning prop is moved around.
I hope you replaced the arms after they got bend, because if the aluminium T-profiles bend away from the lower part of the T, the aluminium gets stretched there. Aluminium has a low tolerance against stretching and this might have weakened the arms, so they could fail any time.