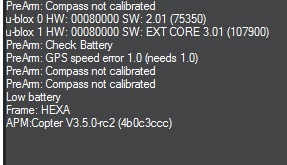
I tried twice, second time after disabling ardupilot. Flash process seems to be OK but there is no end after the blue bar is full. After cold start, firmware is still 2.0.1.
There are some limitations (performance) with the M8N.
According to uBlox documentation, M8N with firmware 3.01 can be configured to scan GPS, GLONASS and Galileo constellation, but with a refresh rate of 3Hz, below the 5Hz minimum of Arducopter.
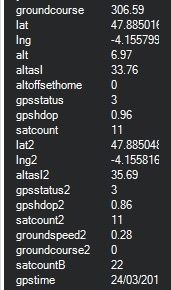
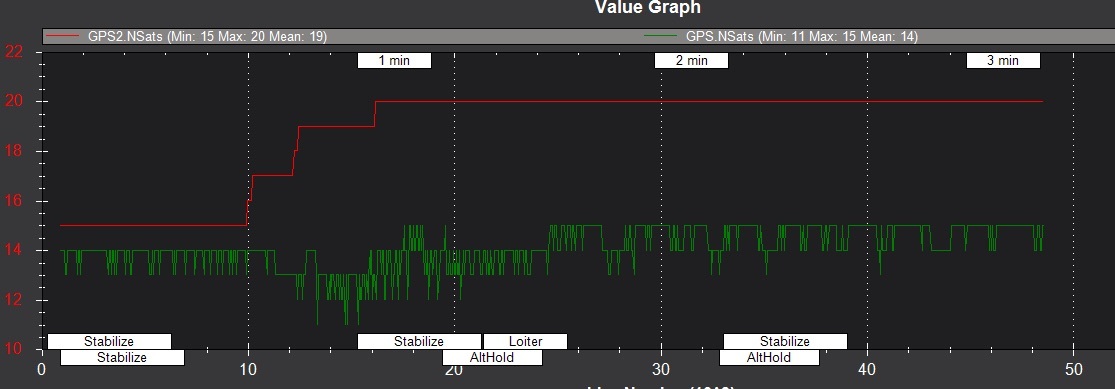
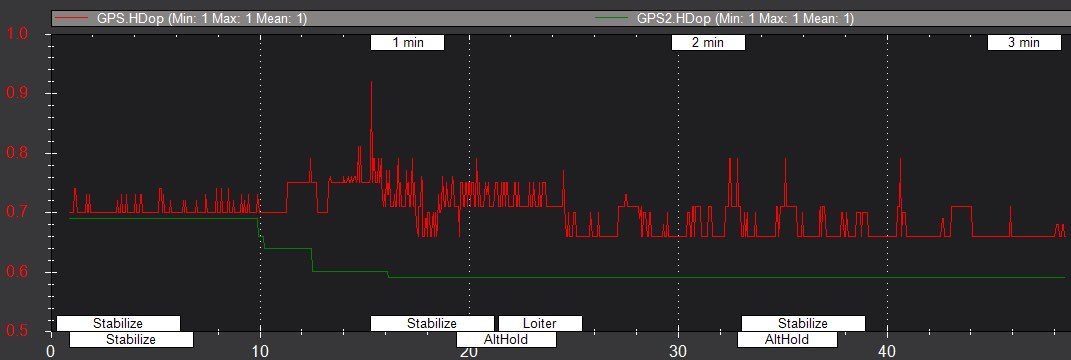
So I choose to configure the external GPS with GPS, GNSS and sBas, at 5 Hz, like the internal one.
Today I had a try at latest 3.5-rc8 Arducopter version.
There is a little video of the second flight (airborne) with Stabilize mode Take-Off, Pos hold, some translation, one U-Turn and RTL sequence.
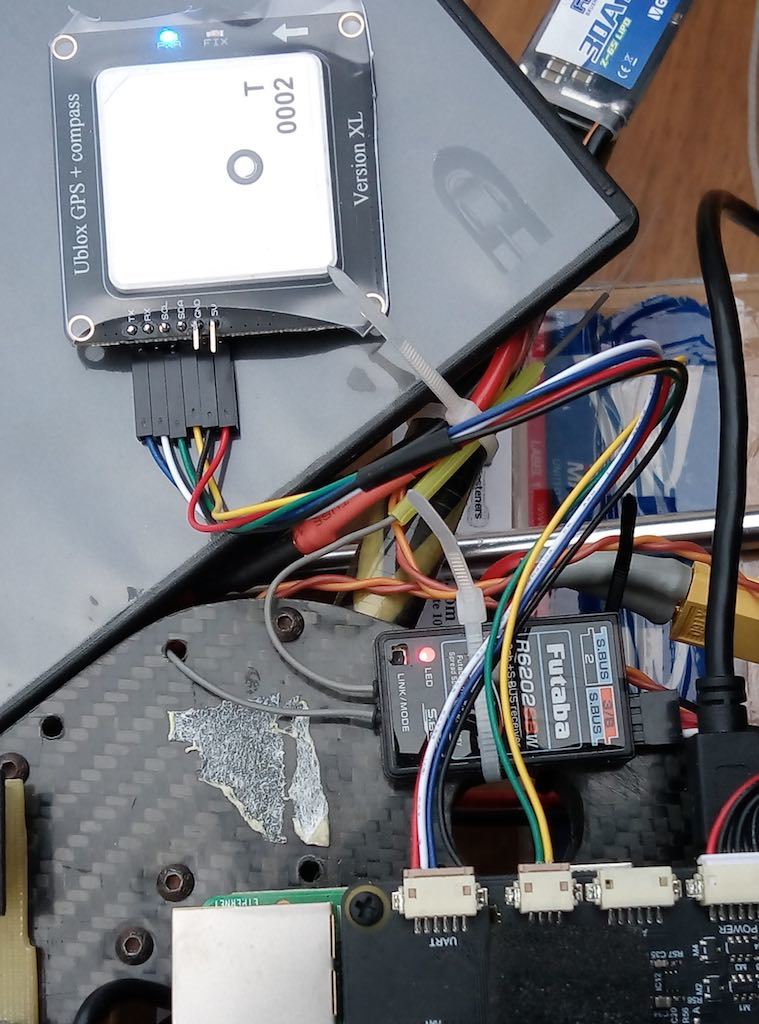
Tip: you can attach a GPS module which has a USB port (like the OP’s Drotek module) through one of the Raspberry Pi’s USB ports and reference it by its corresponding character device (/dev/ttyACM0 on Ubuntu).
This is for the cases when you want to utilize your Navio2’s UART port for telemetry or other communications.