I had 3.4 installed on my Hexa frame (3.4 (ac78fd00)) and I did an update yesterday (apt-get…) in order to move to 3.4.2 version. After reboot, Arducopter version stay at 3.4 (ac78fd00).
Please can you confirm what version is available via apt-get procedure?
Sometimes it looks like EMLID works on super mega incredible projects and looses focus on basis, this is the case i guess.
Best answer you’ll get is build your own or have patience
Corrado
p.s. 3.4 is the latest you will get with apt-get, 3.4.2 and all seguent rc releases not avail yet.
A further note about this matter, AC-3.4.2 is necessary since onboard compass calibration do not complete
with AC-3.4.0 (I tried myself). From “Copter Release Notes”:
Changes from 3.4.1, Bug Fixes: a) compass calibration (onboard) fix to return completion status
As i understand it in order to do that you need some kind of optical beam such as IR-Lock.
On that particular device, i have been asking Emlid for support for months. Not added yet. It is only a driver problem.
The company that makes IR-lock says that Emlid is the one that should adjust the driver, Emlid says it is the company that produces it that should do it.
In the mean time final users can’t use a device that could be very very helpful or at least very exciting to test.
The docs are not updated for beta, but will be updated as soon as we roll a new stable (ETA: before the end of this year), so I guess it might be a little confusing.
The only thing that should’ve been modified is a line in /lib/systemd/system/ardupilot.service
From now on, we use systemd as a tool start services.
Recap:
sudo nano /lib/systemd/system/ardupilot.service
Read carefully through and change ExecStart line to point to your newly (custom) downloaded binary
sudo systemctl daemon-reload
sudo systemctl restart ardupilot
sudo systemctl stop ardupilot to stop sudo systemctl enable/disable ardupilot to enable/disable ardupilot on boot
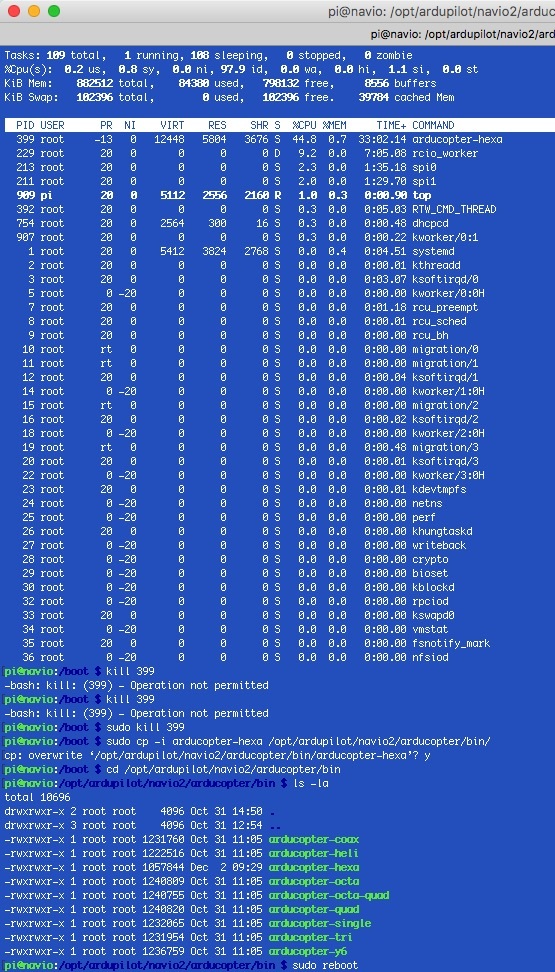
Yes, but I forgot to reload them when trying to move the firmware, so the “kill” command… No way to remember the [quote=“george.staroselskiy, post:12, topic:4395”]
sudo systemctl stop ardupilot
[/quote]
I went to the field and had a short flight to be sure it is OK. All is fine but wind is freezing cold, so I’m back at home.