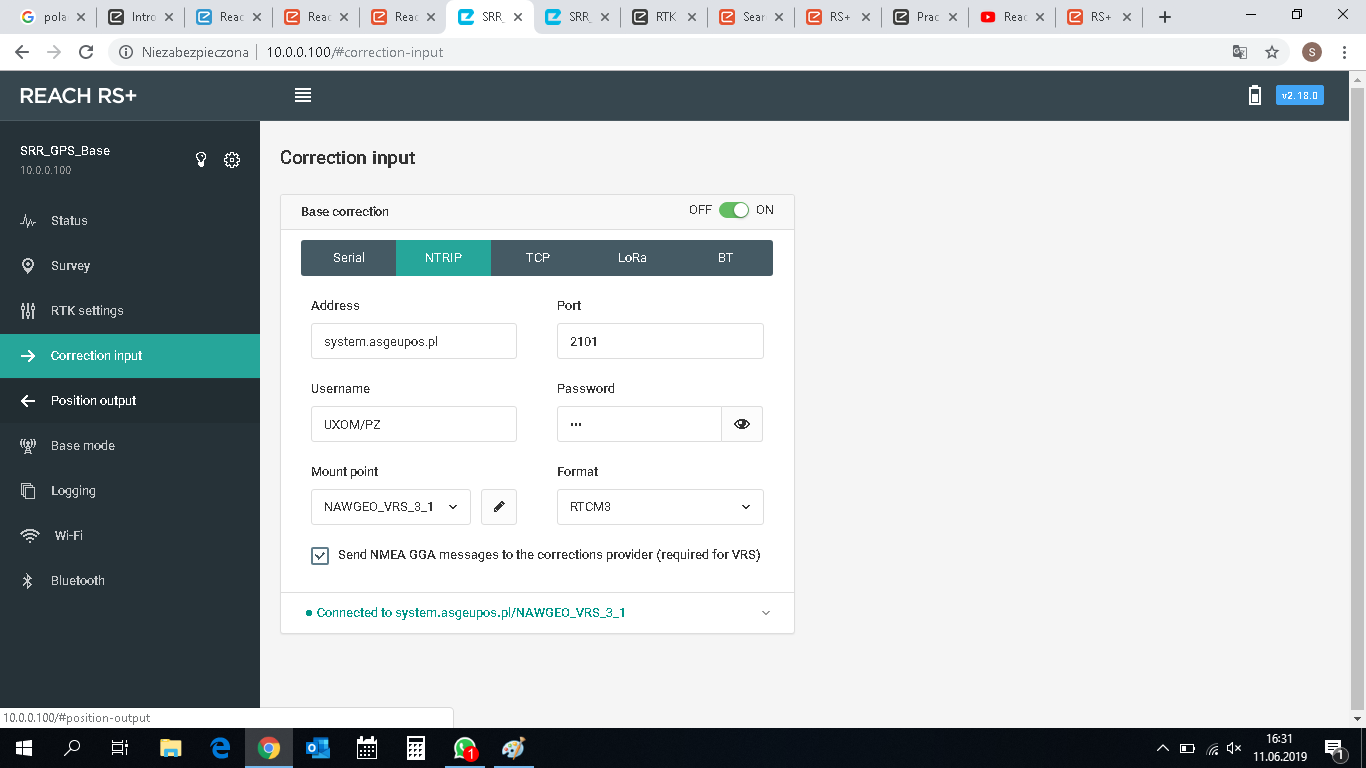
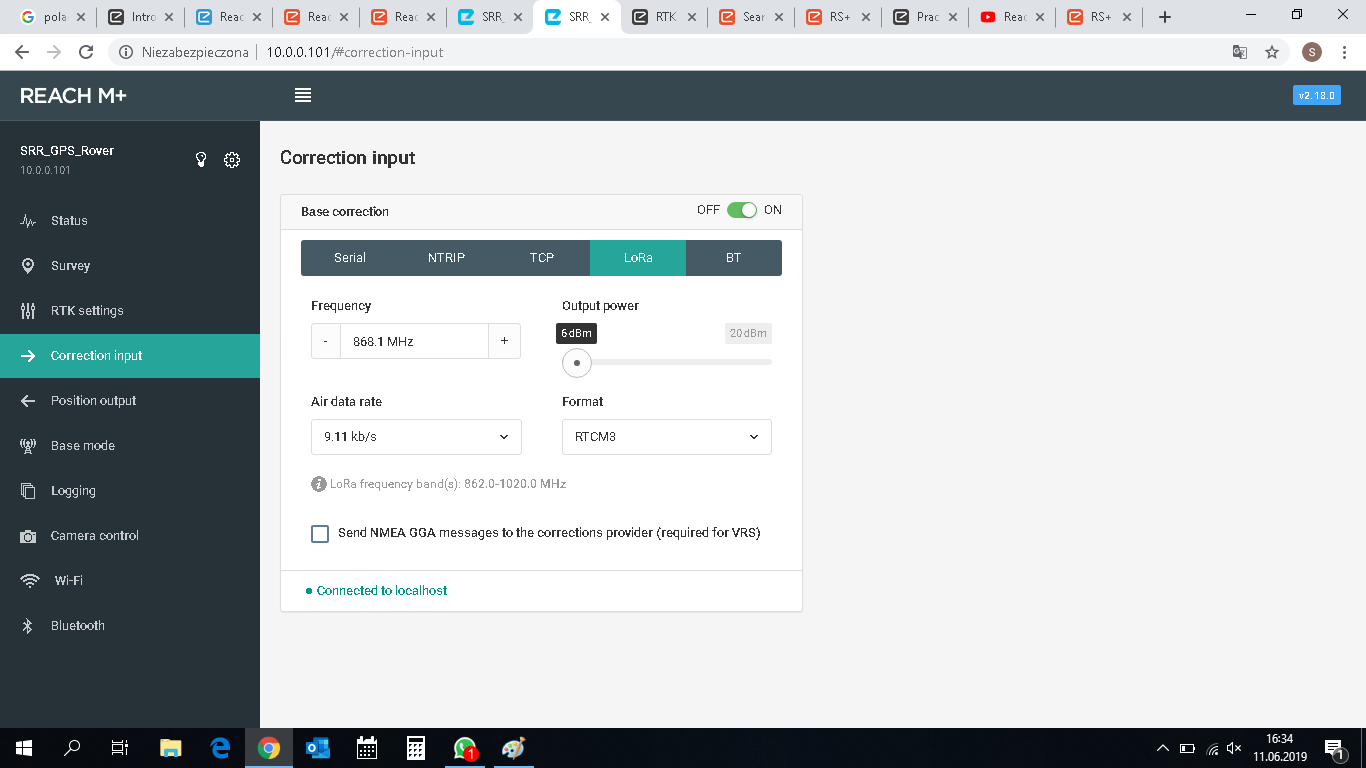
How to refine the receipt of the coordinate correction reach the module m + to the base rs +, which receives corrections from the ground base station from Poland?
How to set the m + module so that when lying on the basis it has been adjusted to point 0?
How do you set the m + correction speed so that when it is moved it shows the right value immediately?
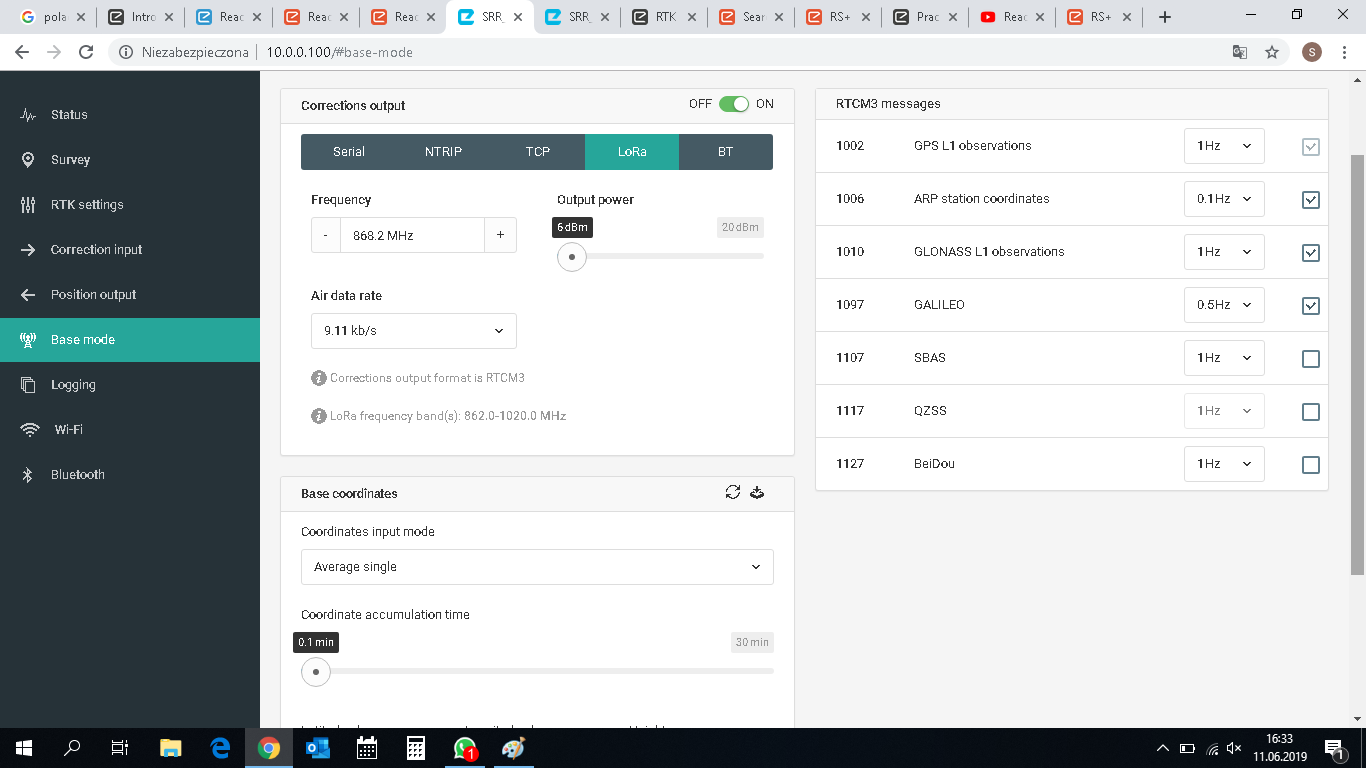
What frequency should be set in the rs + database settings and the m + module? The default is 868 MHz. What setting up data transfer?
So you want to get corrections from a service to you base and then corrections from the base to the rover (M+)? I am not very familiar with correcting the base from another source because I always use a standalone base solution and the only instance I understand is using the service to correct the rover. I am sure you will get a better answer to this soon.
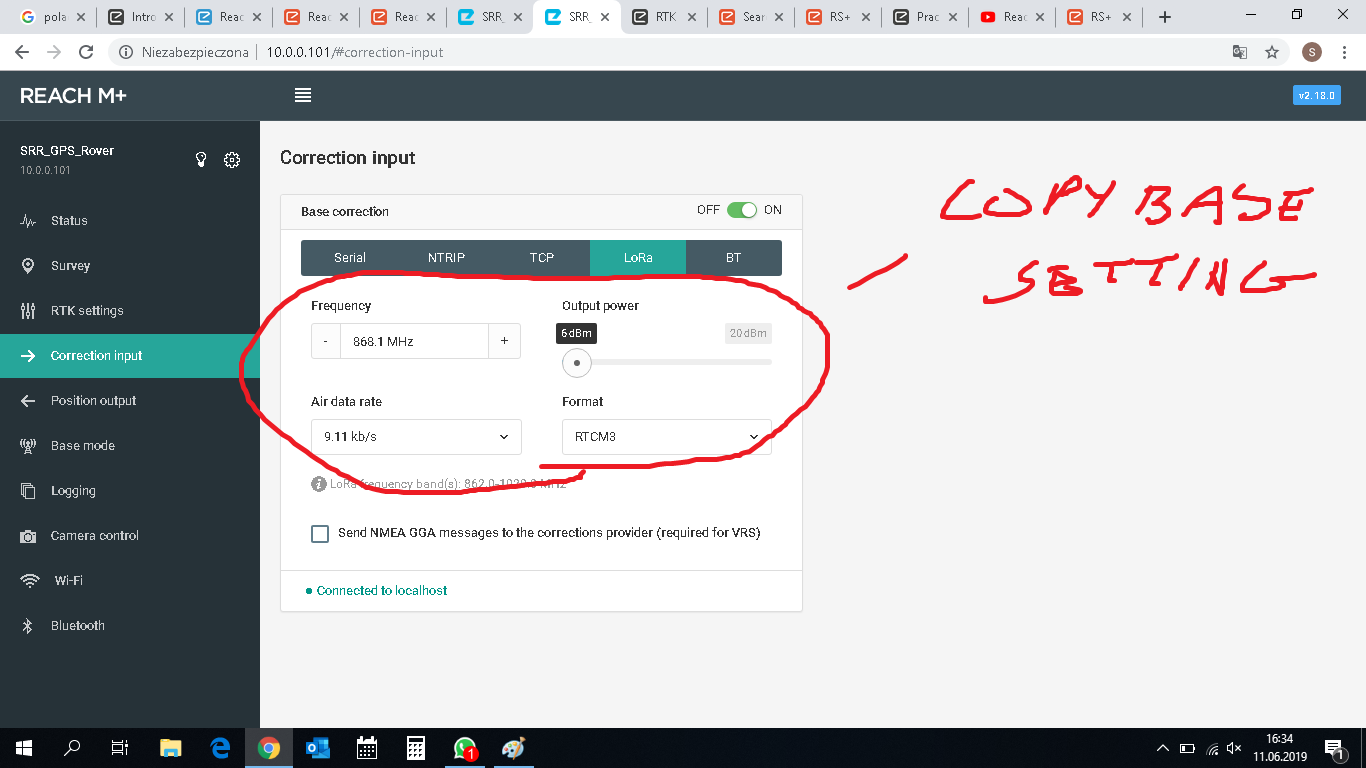
How to physically set the M+ or what settings to use? You might take a look at this. It may answer some of the other questions below. Base and Rover Setup
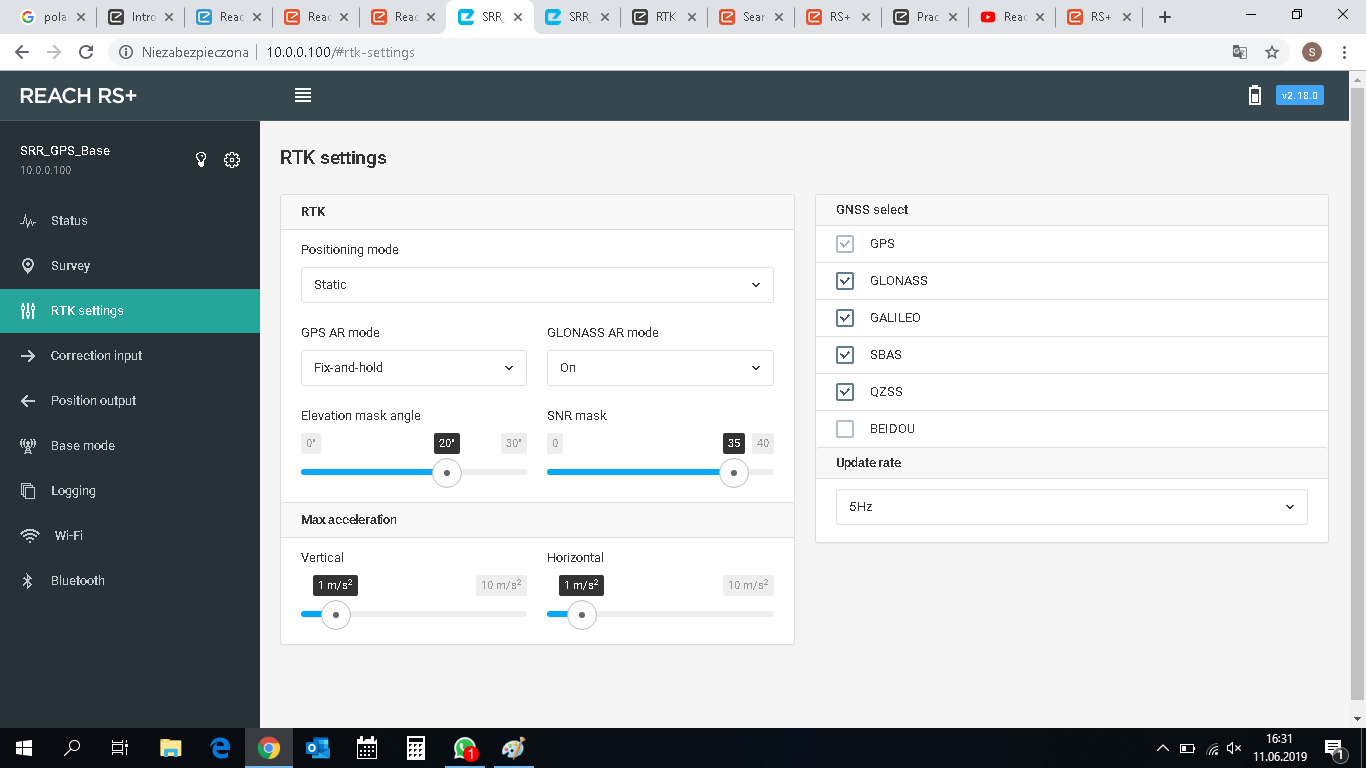
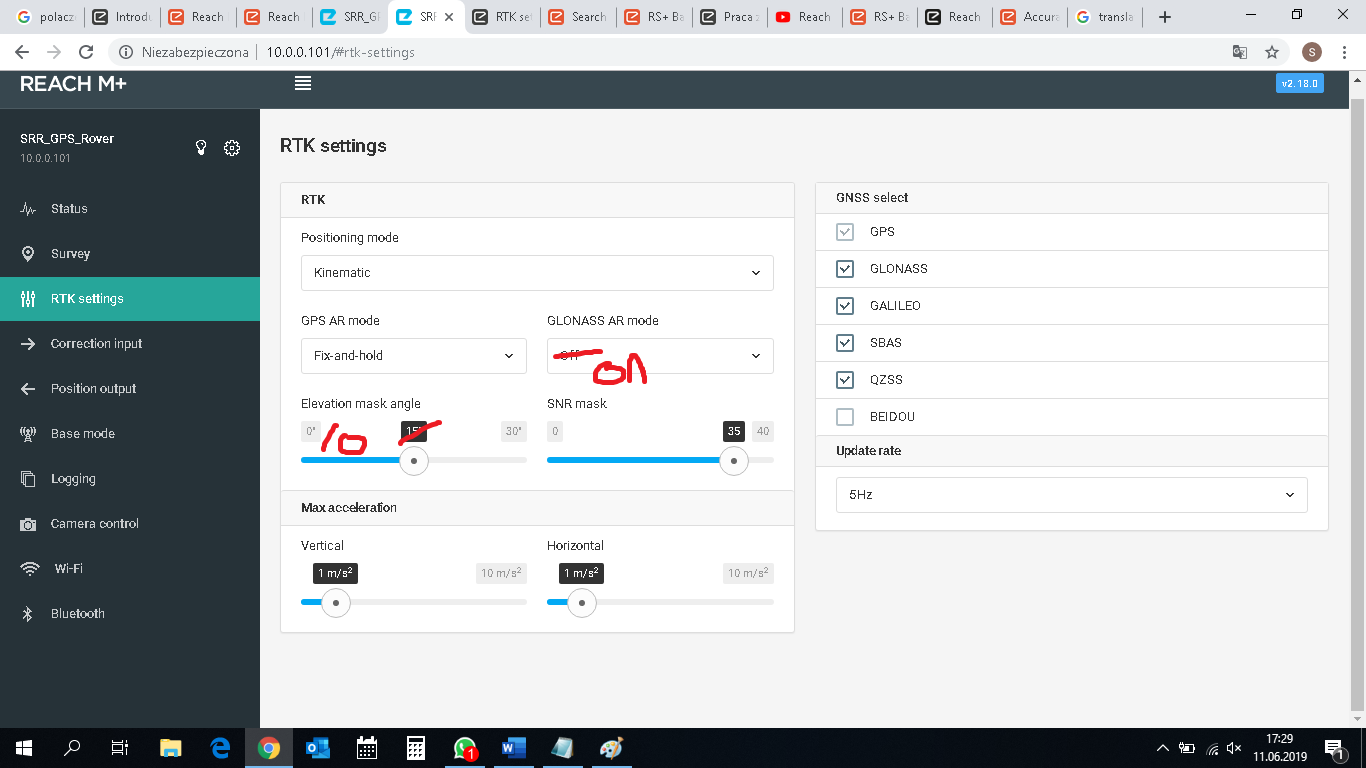
See the document above, but I don’t think there is much of a reason to run faster than 5Hz on a terrestrial survey unless you are mounted to a vehicle that is moving much faster than you are walking.
868MHz is a good start. I believe 864MHz. The lower the frequency the more stable the connection and penetration vs obstacles, but the higher the frequency the faster the communications. The only time I change frequencies is when I have tried everything else, but am still experiencing some kind of interference. Maybe another source on the same frequency… You might go through this thread. [rf - 900 MHz vs 433 MHz for urban environments - Electrical Engineering Stack Exchange](http://900MHz vs 433MHz). The same concept, but a much more appreciable difference.
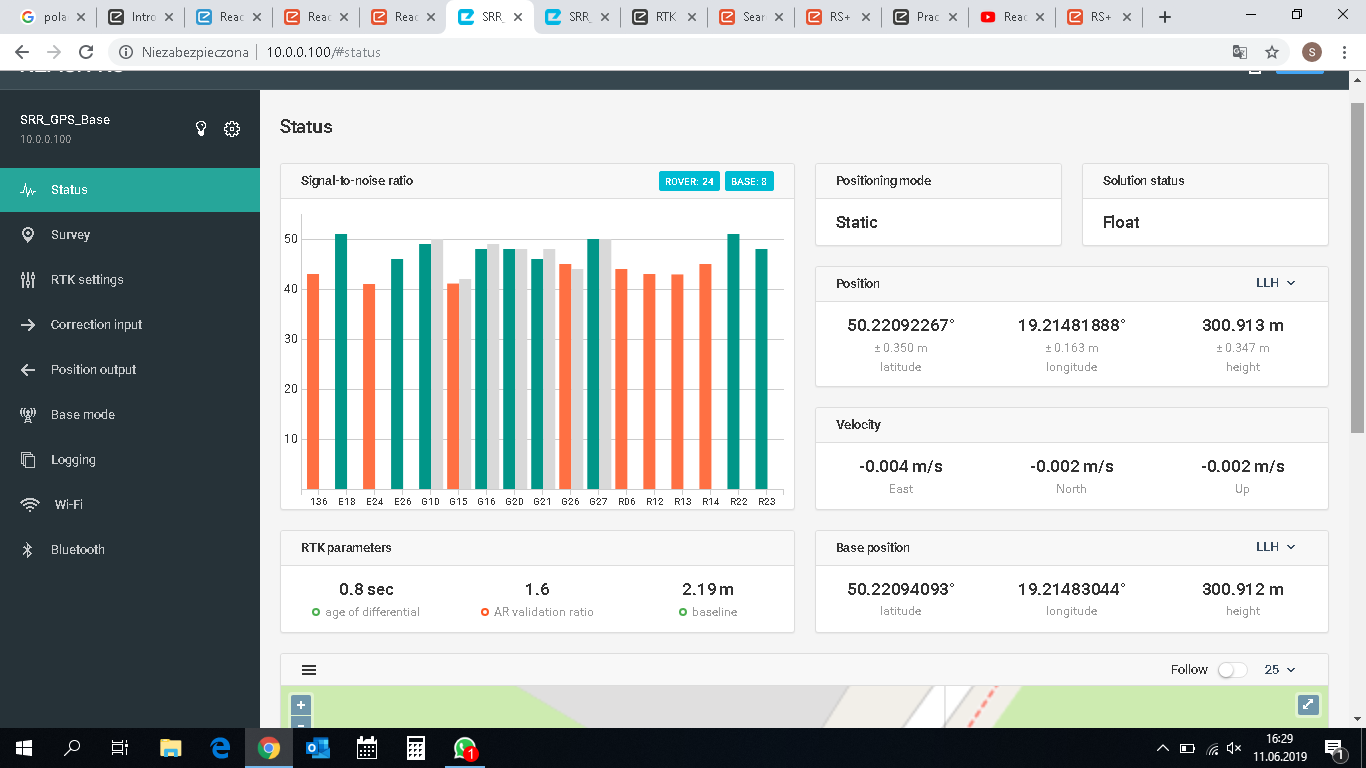
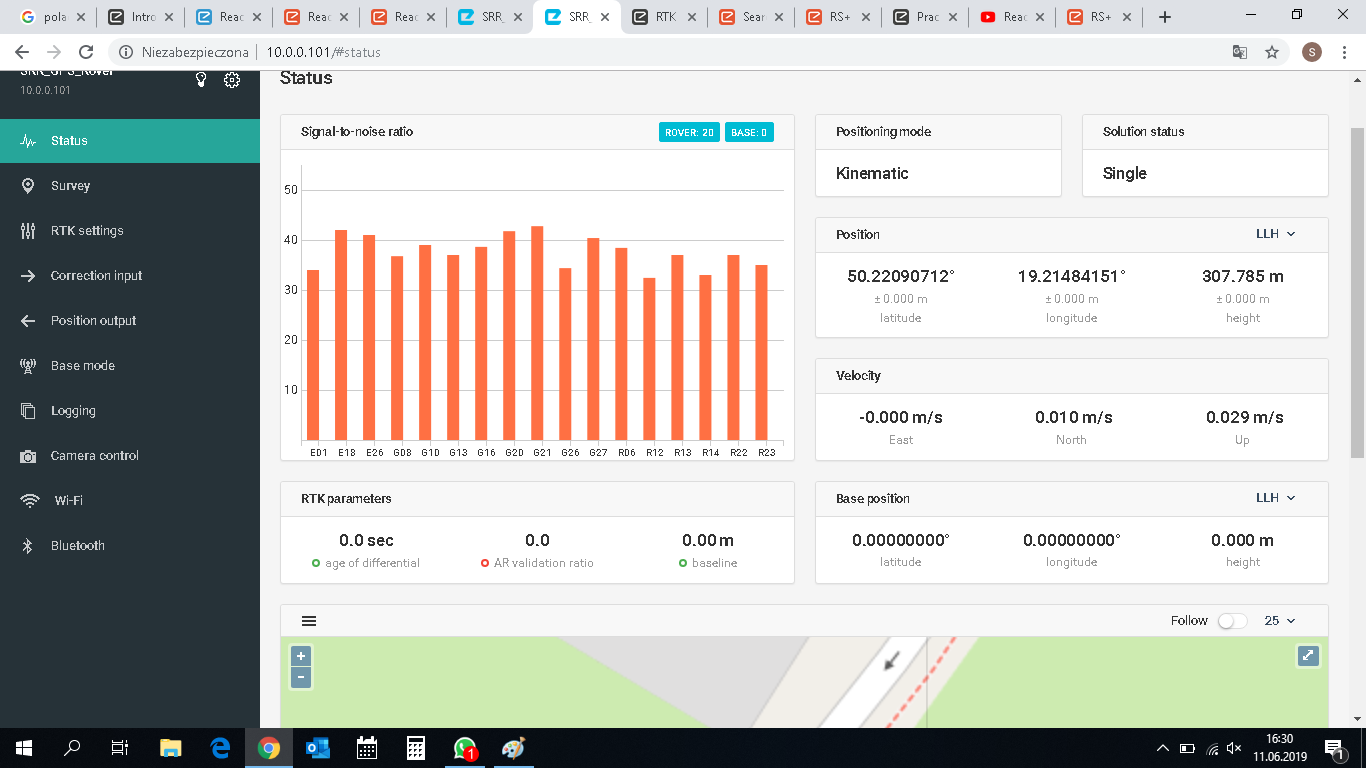
I may be wrong, but on the images above I think they might be set reversed. Normally the gray bars indicate the corrections from the base and your rover status have only its satellites?
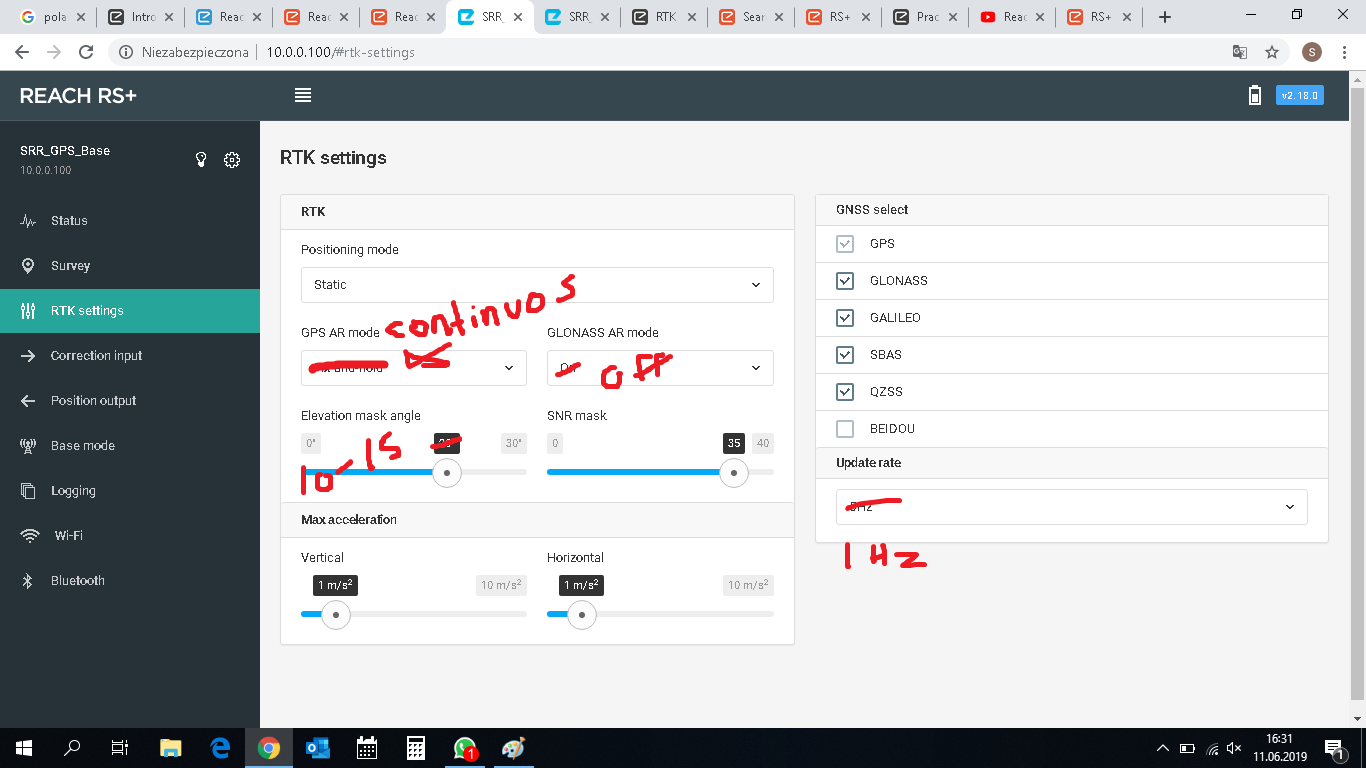
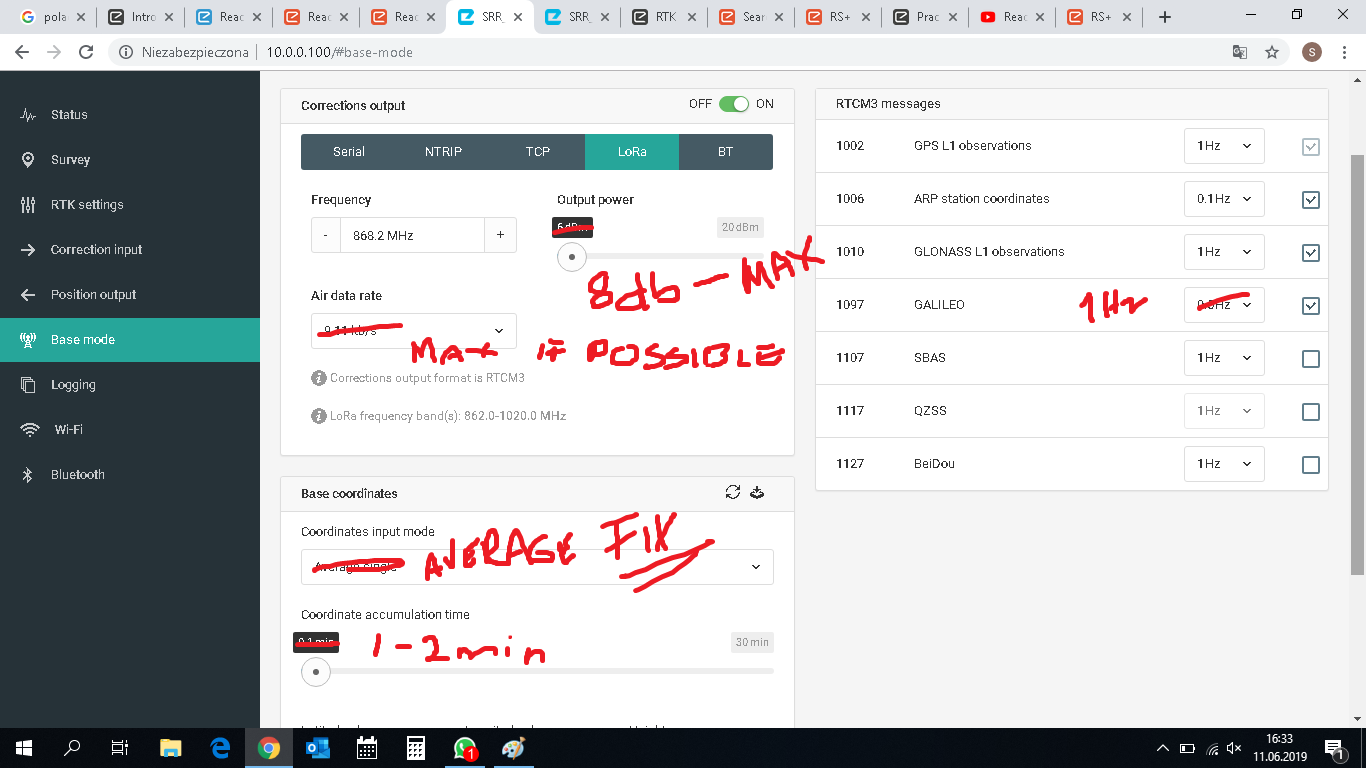
The base RTK settings look good, but I think 1Hz is recommended. This may be different in your case of receiving corrections from a service? The selection of satellite constellations is what you can play with if you are have trouble getting good satellite communications and problems maintaining a good RTK Fix.
Base Mode, turn the power up to around 16dBm and as you inquired before you can increase the Airdata rate. Coordinate accumulation for the initial base point should be 10 minutes or more. Again, this may be different with NTRIP.
Again, when you have problems with the RTK Fix I believe you can leave the base with the full constellation setup you find most stable and troubleshoot on the M+ (rover) until you stabilize. 5Mz looks good to me.
There’s some really sharp people on here so I look forward to corrections of my post and learning something myself! Good luck!
GLONASS AR is like a secondary form of corrections. I don’t exactly understand what it is cross-referencing and cancelling out, but this doc from Emlid confuses me though?
I hope @bide doesn’t mind, but he was helping me recently with this via PM. I still have a tough time understanding GLONASS AR MODE somewhat:
timd1971: > Also, simply. What is GLONASS AR mode? Off or on? Does it help to have on when GLONASS sat selected its OFF by default i see. Using fix and hold.
bide: Well you need around 5-6 decent satellites in ONE constellation to get a fix. With GPS, the SBAS ones count as well. I can’t speak for high latitudes or other continents though. So if you want your ambiguities solved by the GPS satellites then leave GLONASS AR off, and if you don’t care if the ambiguities are solved by GLONASS satellites or GPS satellites then leave GLONASS AR on. You can’t get a fix with some GPS and some GLONASS, it uses one or the other.
@bide mind is much higher rated then mine so i would thrust him over me. I think its because he work on Linux and i am still on windows computers
But is your question if Reach utlize glonass AR with only GPS enabled? Then i guess Bide is right. I would thrust that.
If so i need to do more correction in my post above.
Note to self: Get my self up to speed before you speed everybody els of in the wrong direction.
Yes, unfortunately all of our minds combined still cannot compete… especially mine, as it would affect things negatively since at birth Coca-Cola was put in my bottles. ; ) ha!