Hello,
Currently trying to get my DJI drone to fly via raspberry pi.
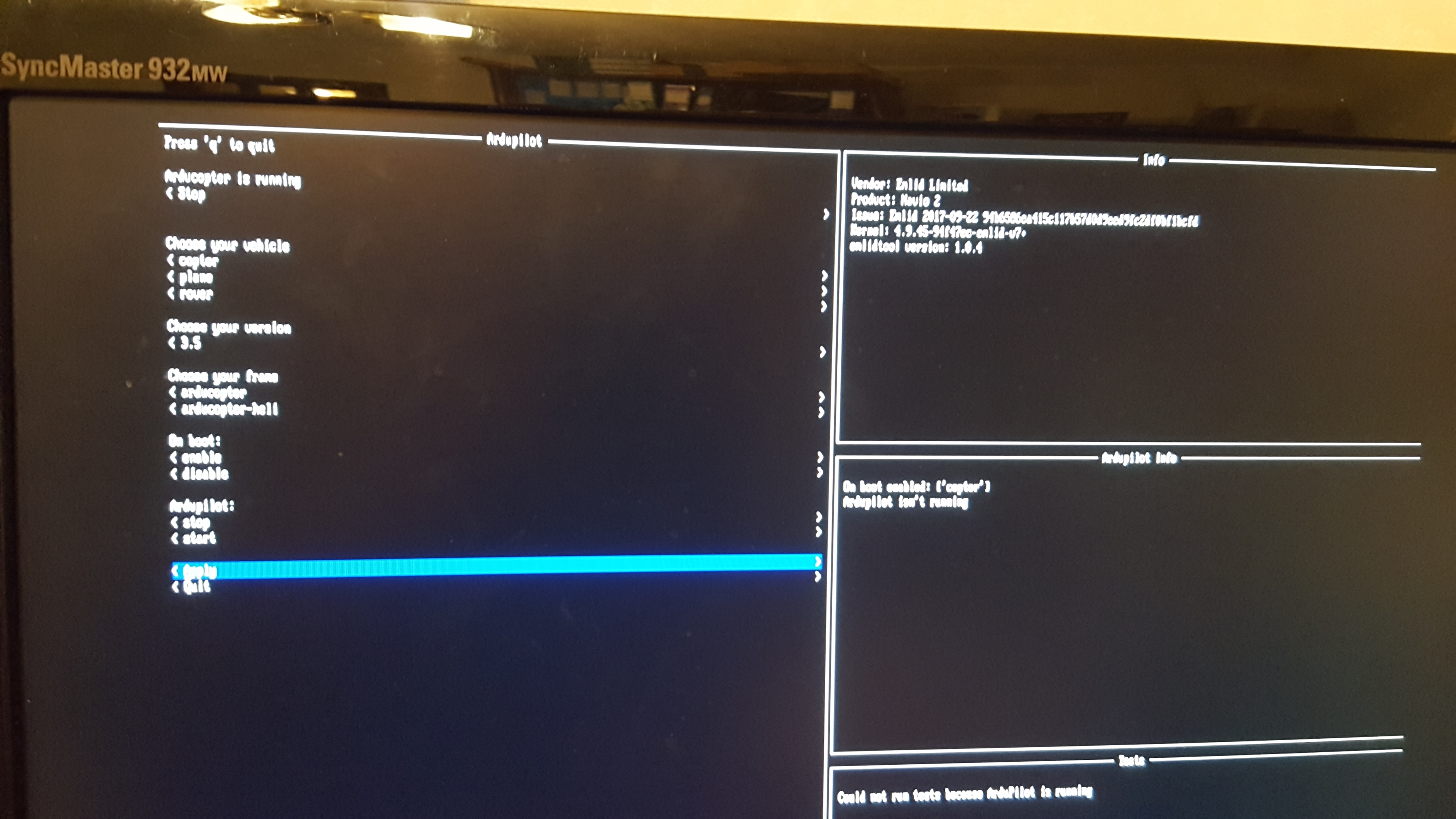
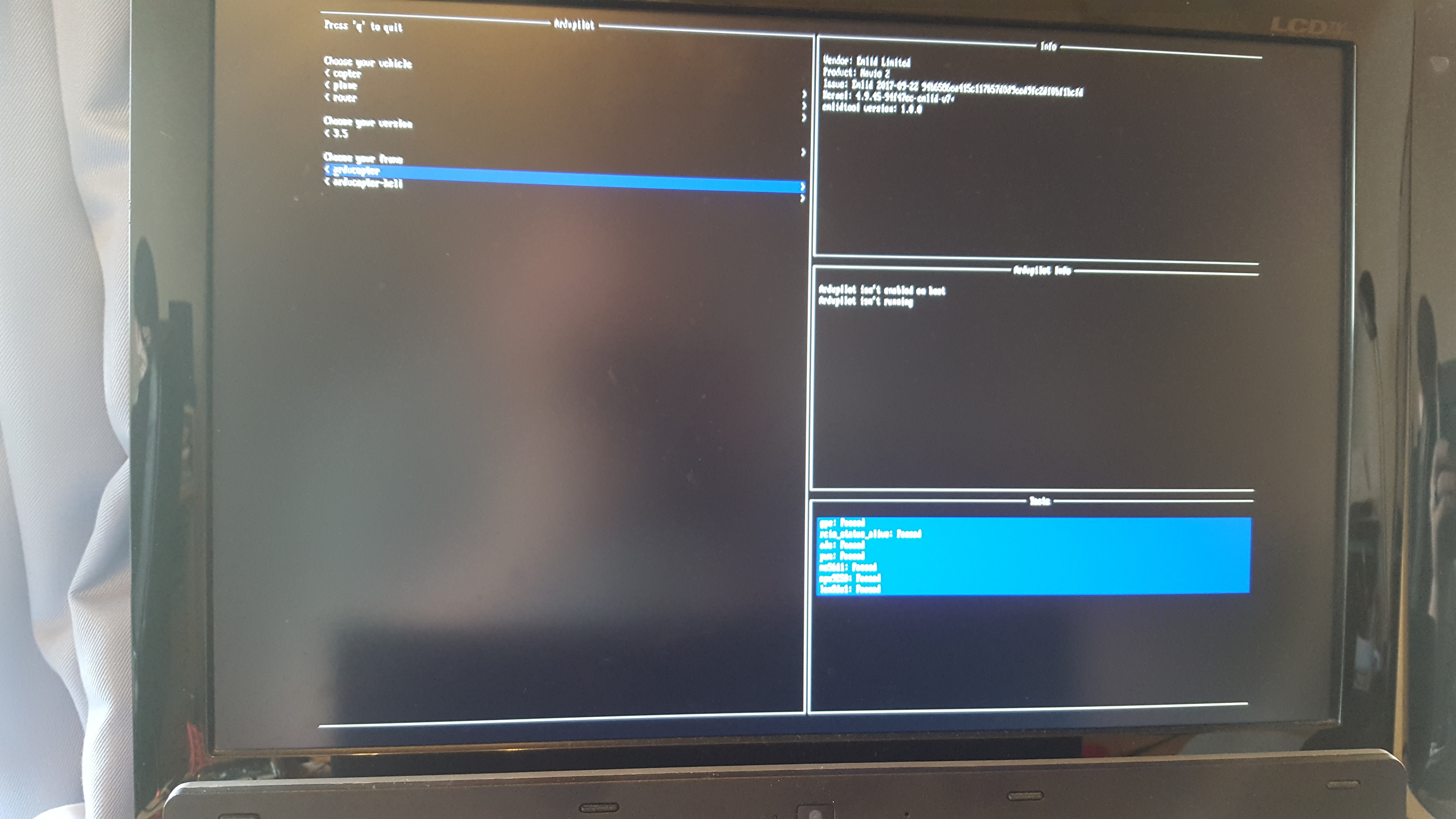
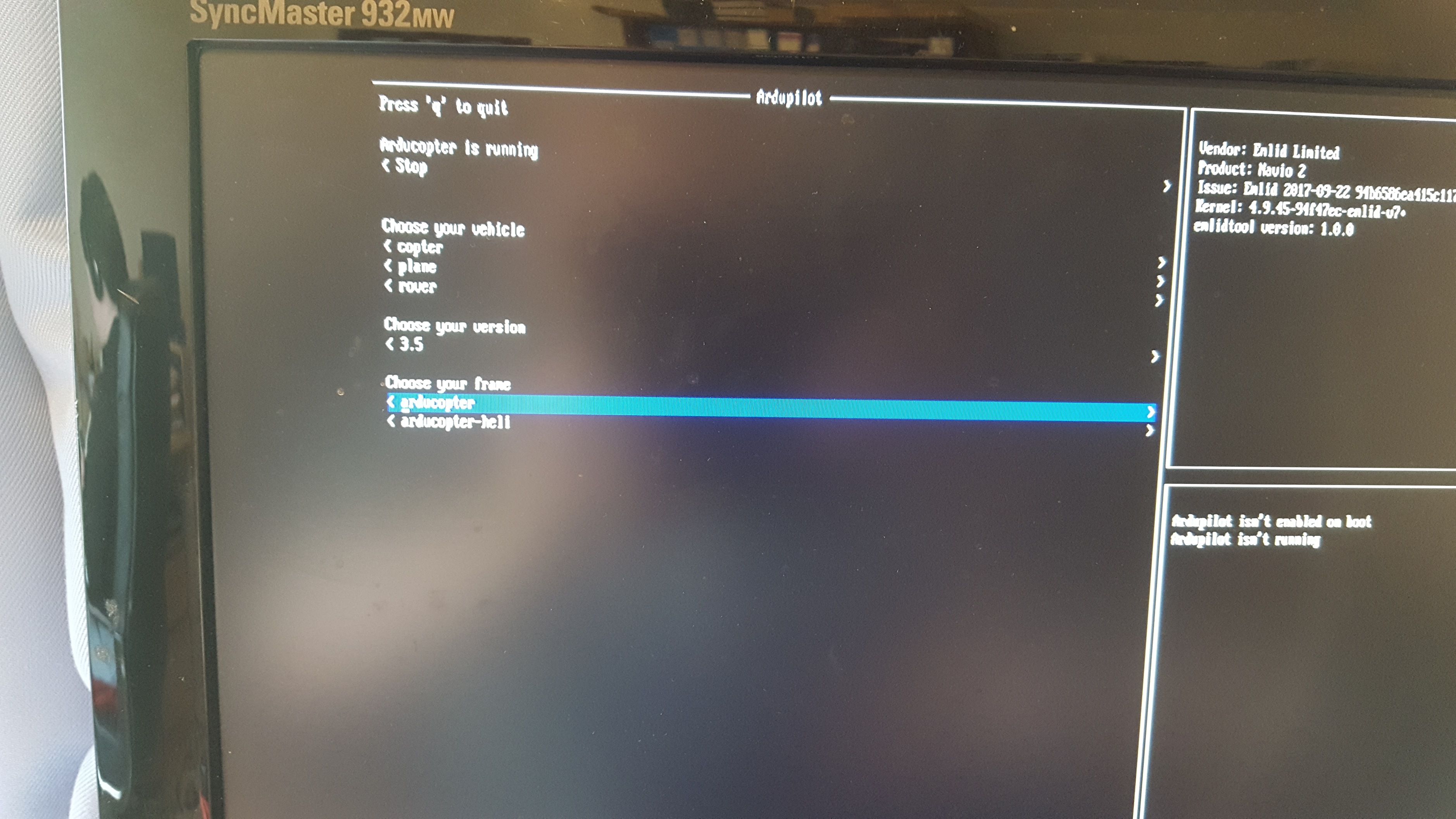
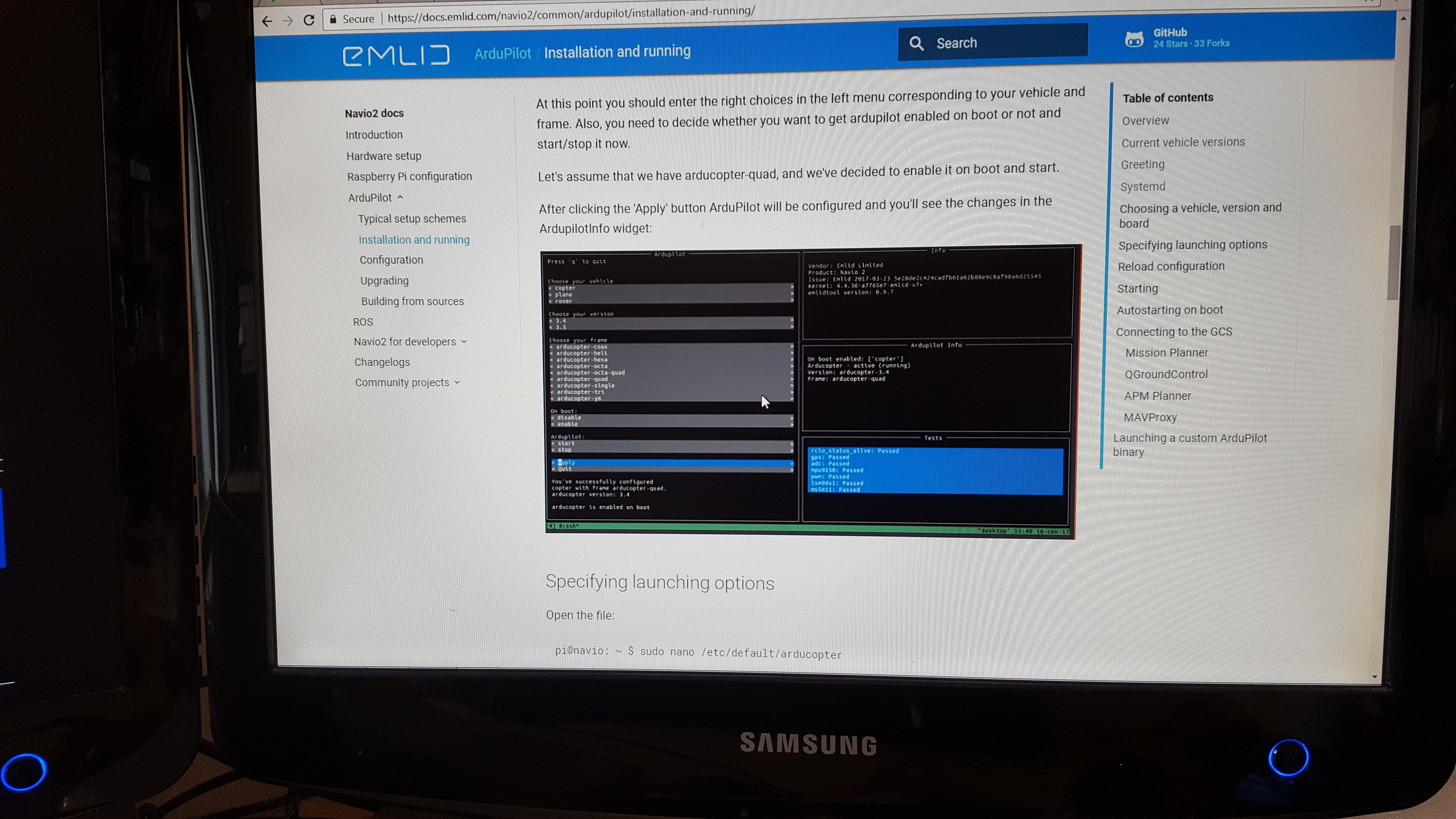
running the version of Stretch from the EMLID website and its not giving me the options for a quad copter as shown in the documents section. It just shows the option for copter.
When I power up the drone the ESC’s buzz meaning none are getting a signal, if I wire the motors directly to the receiver I can make one move. This means they are getting power.
I am about to try a fresh install of the OS Image but could
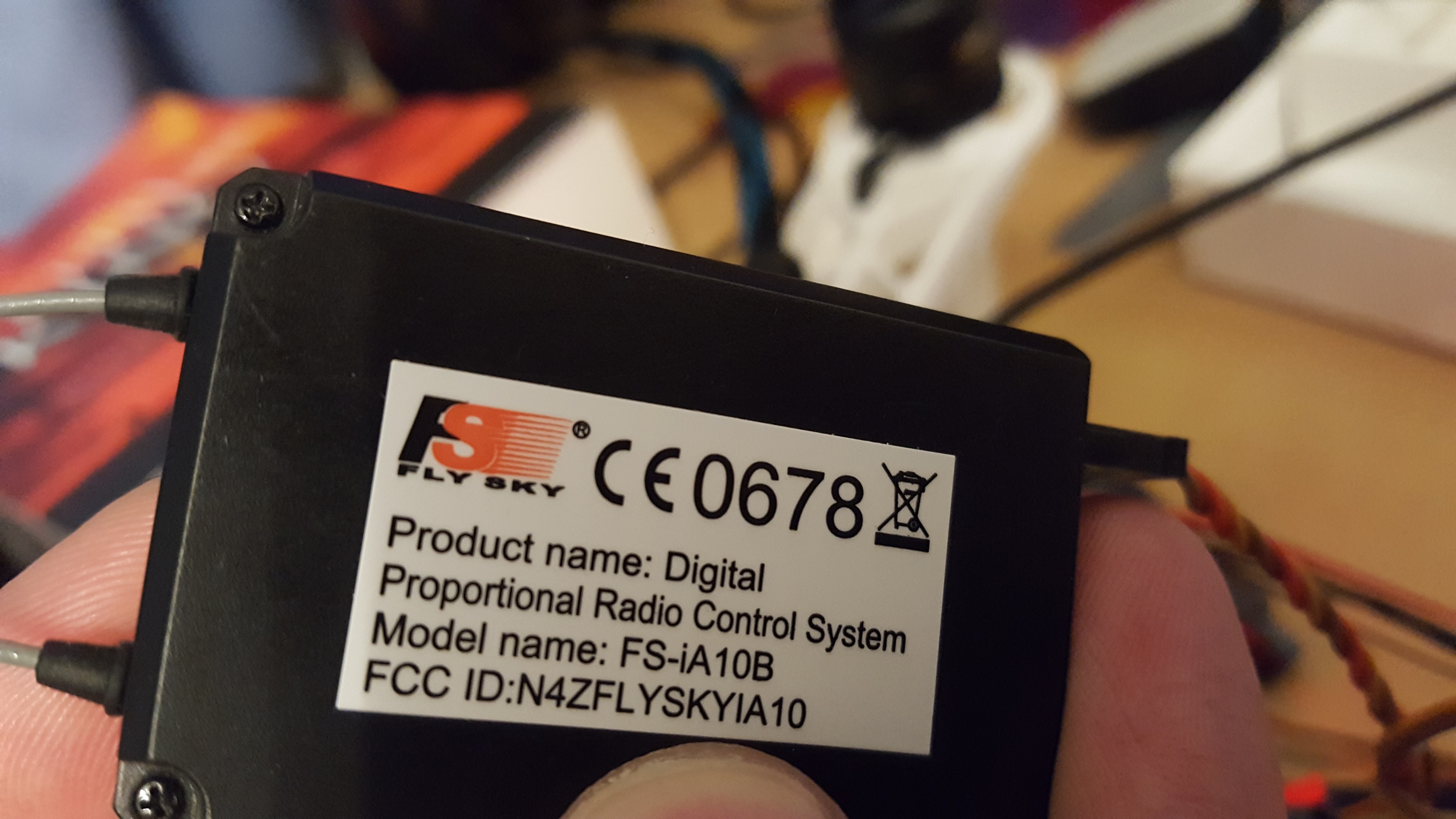
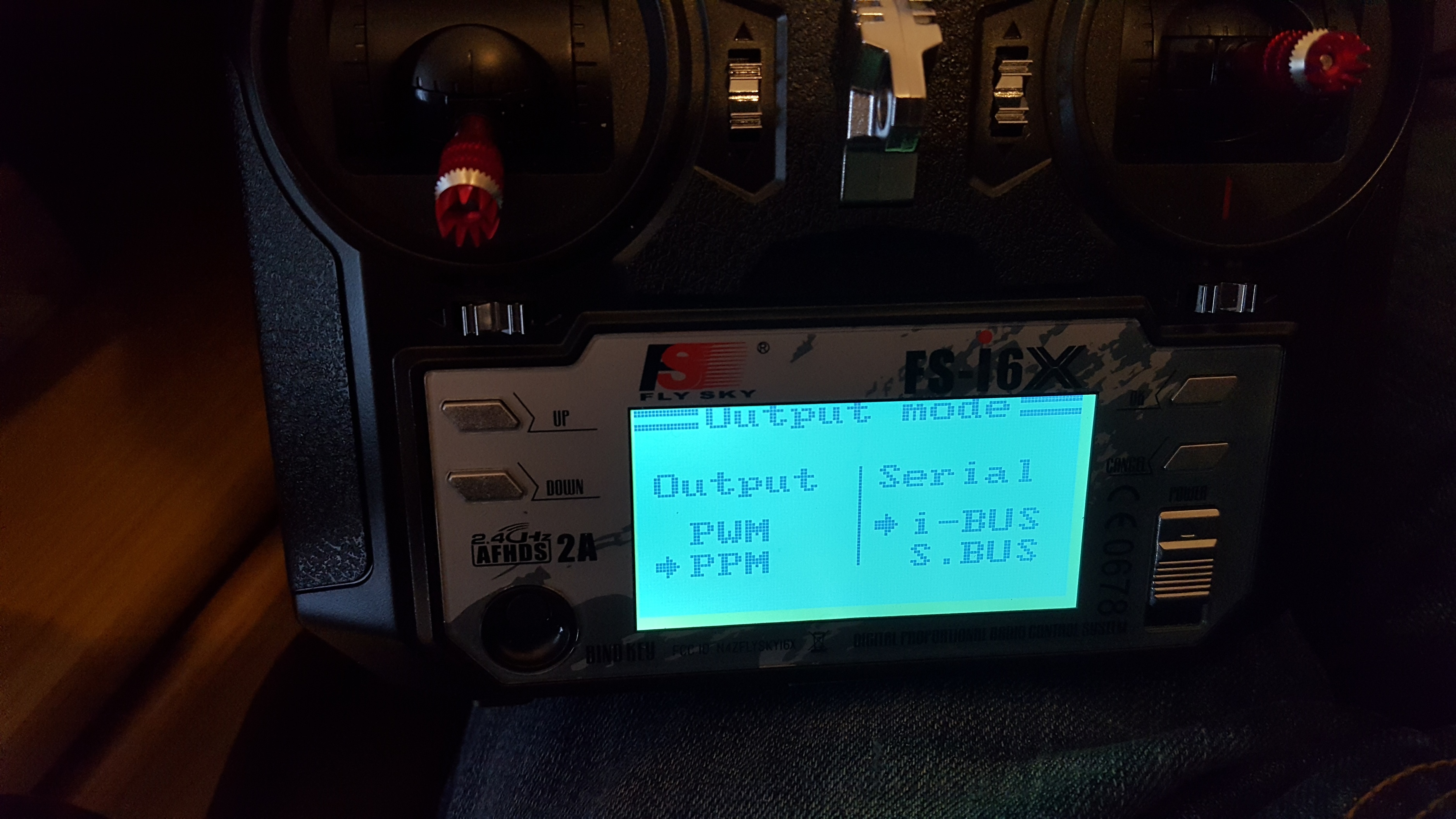
it be possible that I just dont have an acceptable receiver? The controller does do PPM but cant get it to work.
Motors should do a musical start up if they are getting signals ok from the flight controller.
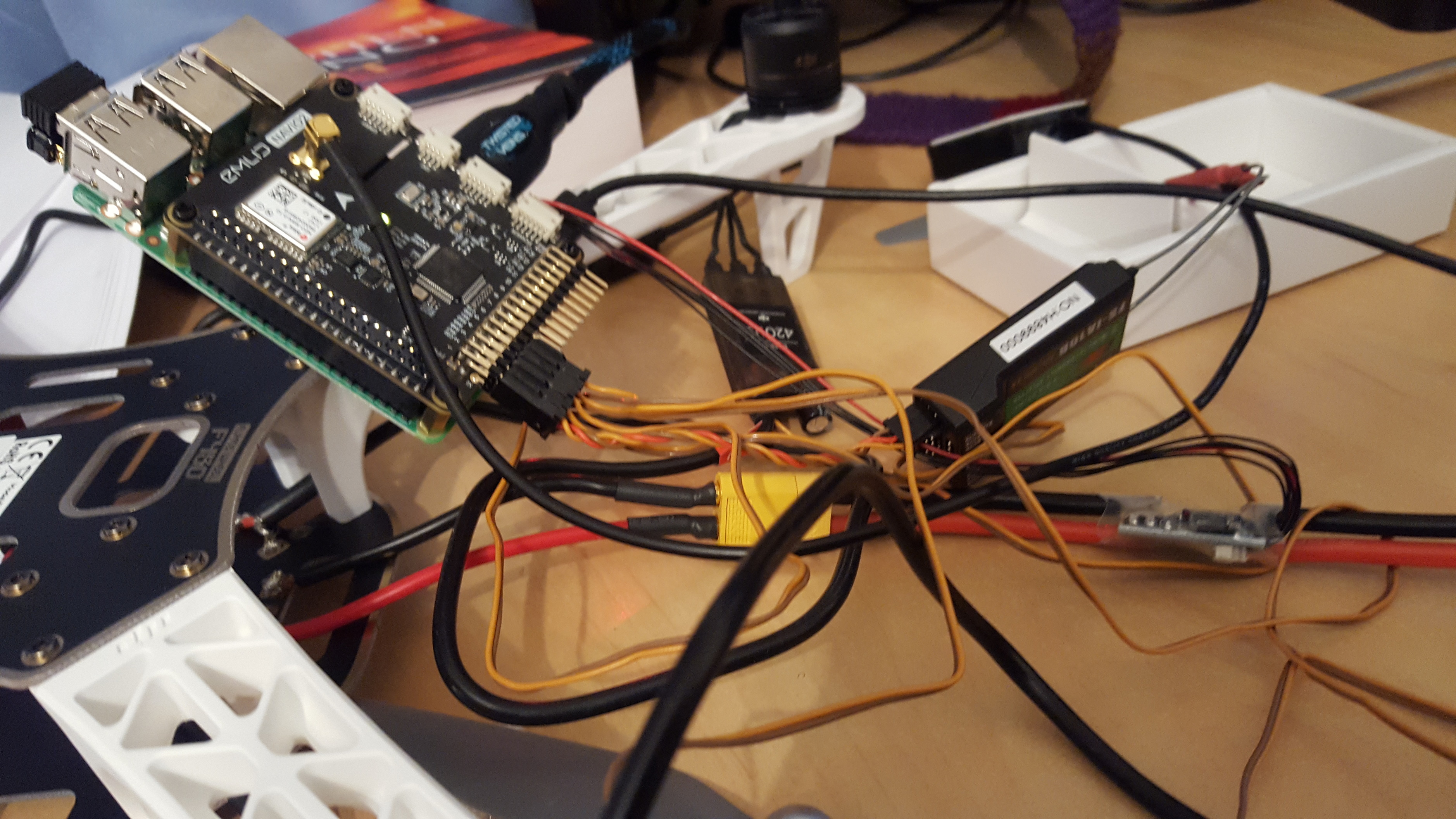
I am attaching images of my current wiring. The radio receiver is plugged on to the correct pins on the NAVIO 2 and then the motors just go on the next four sets of pins.
Any hints or tips would be appreciated. If I have to get a new controller then so be it, just dont want to spend the money when I have just wired something wrong or used the wrong software
What GCS are you using? The last configuration should be done and written to your navio to make the copter properly config.
At the stage your are now, your copter is not ready to be used. Your are trying to fire up your motors before you have finisehd the setup guide.
Whats GCS? The only step remaining that I saw was to do with different programs thought it still should have responded to radio signals. Reflashed the SD card so will try running the pilot software again and see
Ground Control Station.
Sorry, i see you dont have the full list of choices. Did you run this setup before ? (multiple times)
I see it doesnt perform the init test in the windows bottom right.
If it doesnt work after reflashing could you run this
Ok so reinstalled the OS then ran an update for an hour that mad all emlidtool commands not work so reinstalled it again and didnt run an update.
Currently same probelm.
No quad copter options and i tried the commands to disable and relaunch ardupilot but once I reopen ardupilot still nothing. I also cant get the SSH to work but the updating does. I also cant find it on my network using Fing
Should I try installing the older version of the OS?
It still is only giving me the copter and heli options. Could it be limited depending the signal receiver ?
Got the GCS software downloaded but need to do this first.
Also for Marc I added the plug to the I-Bus on the receiver. Made no difference
Still not getting this to work as I still can’t connect properly to set the drone up as a Quad drone using the GCS just keeps giving me a connection error.
All help is appreciated dont want to have wasted nearly £200 on a thing I cant get to work
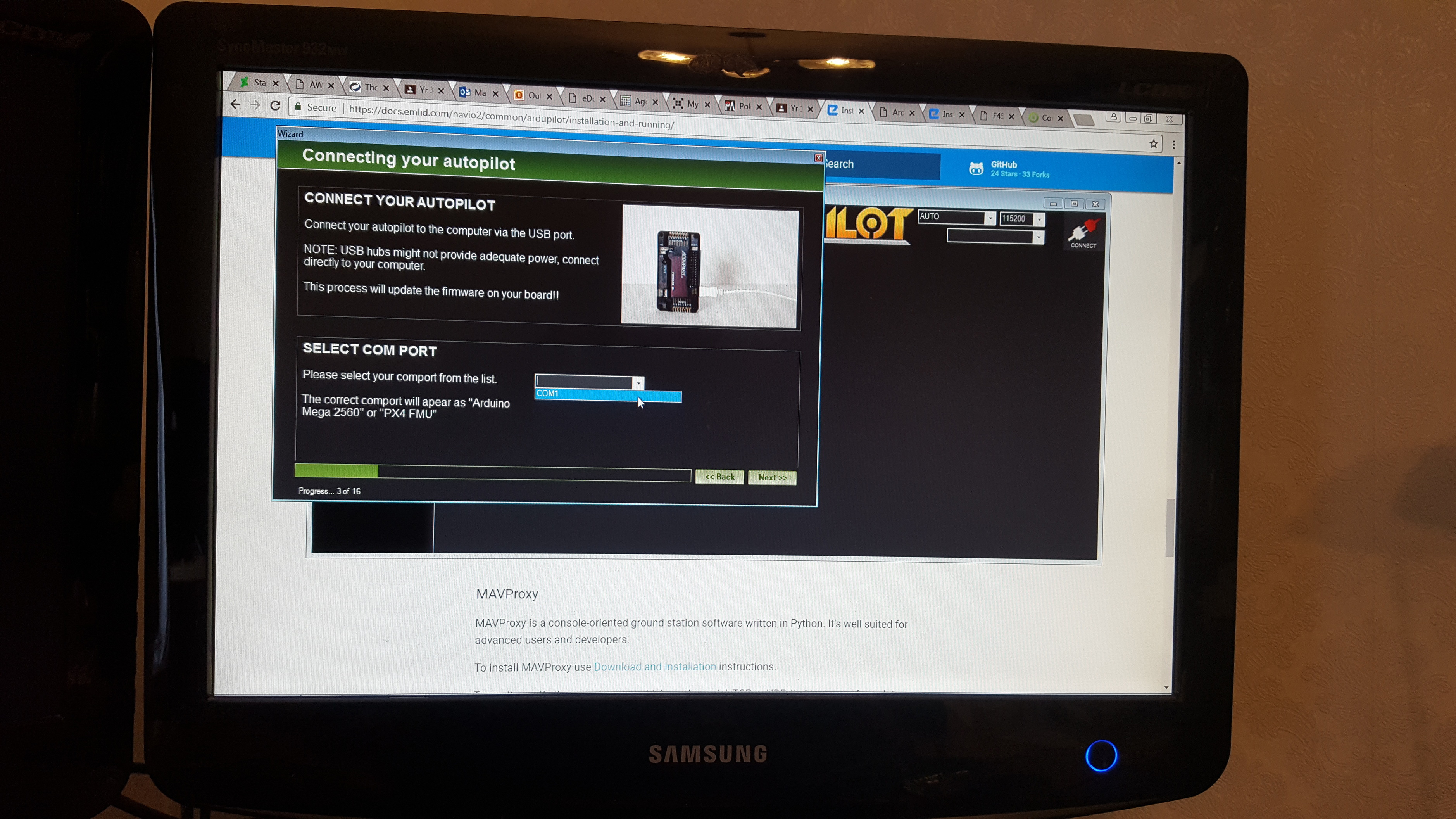
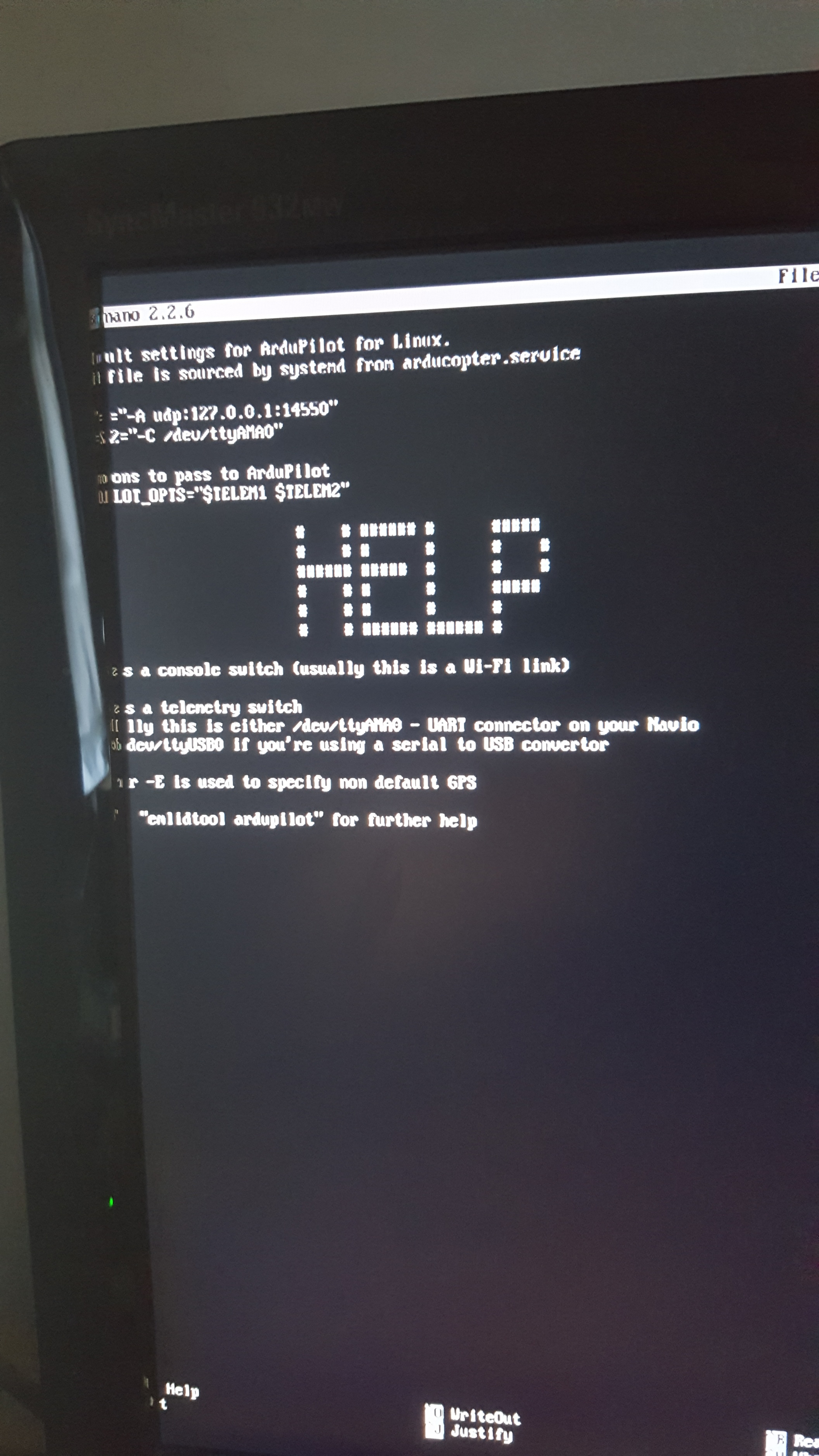
You can find information about connection setup in our docs.
If you don’t have telemetry radio, then the simple way to connect your Navio2 autopilot to your GCS is WIFI.
Connect your device to your local network or start in AP (access point) mode. After your PC and RPI with Navio are in one network, you need to change target IP in /etc/default/arducopter (127.0.0.1) to IP of your PC.